") 基于STM32的球上自平衡機(jī)器人設(shè)計(jì)方案
基于STM32的球上自平衡機(jī)器人設(shè)計(jì)方案
將機(jī)器人整體開源,同時(shí)總結(jié)一下機(jī)器人搭建過程中遇到的坑和未來的改進(jìn)方向。在分享的文件里包含了結(jié)構(gòu)設(shè)計(jì)、程序控制、電路設(shè)計(jì)以及其他模塊相關(guān)資料供大家參考。
機(jī)器人原理分析
首先來看成品圖:

如圖所示,該機(jī)器人根據(jù)陀螺儀的位姿數(shù)據(jù),通過三個(gè)全向輪驅(qū)動(dòng)底部球體調(diào)整自己在球上的位置,保持動(dòng)態(tài)平衡的同時(shí)實(shí)現(xiàn)全向移動(dòng)。
保持動(dòng)態(tài)平衡過程需要對機(jī)器人進(jìn)行運(yùn)動(dòng)學(xué)分析,這里參考了平衡小車之家的運(yùn)動(dòng)學(xué)方程:
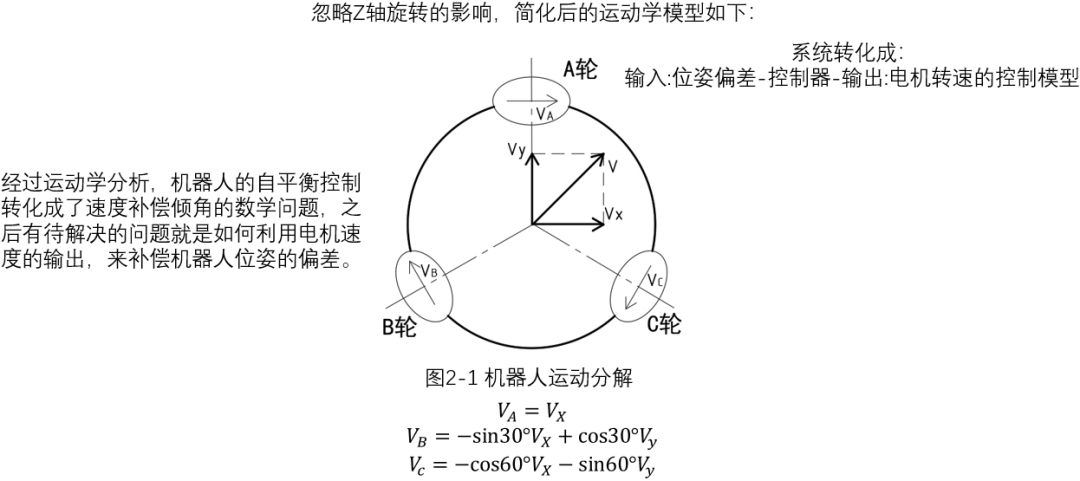
自平衡控制問題轉(zhuǎn)化為三步:輸入X、Y角度—控制器計(jì)算—輸出A、B、C電機(jī)轉(zhuǎn)速的控制模型。
控制器設(shè)計(jì)
首先考慮參考平衡車控制,球上自平衡機(jī)器人本質(zhì)上依然是一個(gè)一階倒立擺問題。
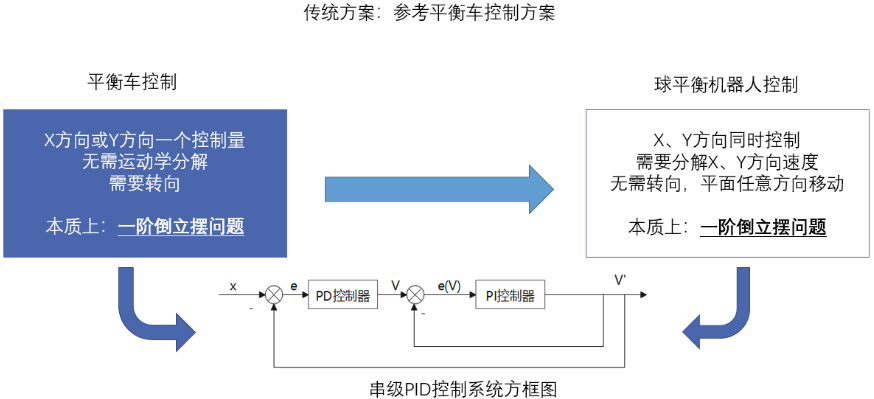
這里參考了飛思卡爾直立車的控制方法,采用串級PID控制器,外環(huán)PD角度環(huán),內(nèi)環(huán)速度PI環(huán)。
由于我的驅(qū)動(dòng)方案選擇的是42步進(jìn)電機(jī),在速度閉環(huán)的時(shí)候有些問題。正常的直流電機(jī)+編碼器的控制方案可以通過編碼器將輪子的真實(shí)速度計(jì)算出來,從而和控制器的理想轉(zhuǎn)速作差,實(shí)現(xiàn)速度控制。
而我這里的速度閉環(huán)是通過計(jì)算上一個(gè)時(shí)鐘周期時(shí)給步進(jìn)電機(jī)的控制量,通過運(yùn)動(dòng)學(xué)方程分解,得到機(jī)器人的虛擬速度,與理想轉(zhuǎn)速作差控制。我認(rèn)為這種速度閉環(huán)方式還是存在一定缺陷的,但是在網(wǎng)上查看論文的時(shí)候我發(fā)現(xiàn)有很多自平衡機(jī)器人都是用42步進(jìn)電機(jī)來實(shí)現(xiàn)速度閉環(huán)的,不知道是什么方法。
這里還可以好好思考一下為什么角度環(huán)要用PD控制,速度環(huán)要PI控制,角度環(huán)的P部分和D部分對機(jī)器人控制有什么影響?在很多CSDN調(diào)試平衡車的博客中都有解釋,這里就留給大家思考了。
硬件及結(jié)構(gòu)設(shè)計(jì)
自平衡機(jī)器人的硬件清單有:
56mm全向輪 45元/個(gè)
42步進(jìn)電機(jī) 25/個(gè)
42步進(jìn)閉環(huán)模塊 59.8元/個(gè)
LM2596S降壓模塊 20元
STM32F103C8T6-4飛控板 59.8元
GY-521六軸陀螺儀 25元
用到的模塊大致如上所示,C8T6的價(jià)格隨著最近芯片漲價(jià)直線上升,我白嫖了實(shí)驗(yàn)室的兩塊板子,現(xiàn)在買一塊實(shí)在太貴,可以等芯片價(jià)格穩(wěn)定一些再買。其余開關(guān)排針等常見元件不再贅述。
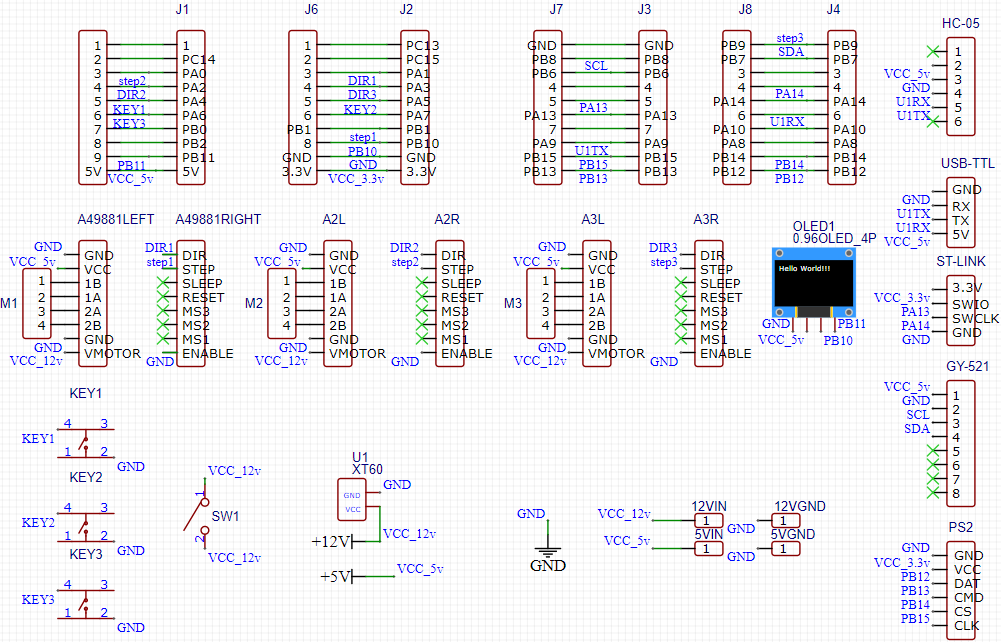
電路原理圖如下所示:
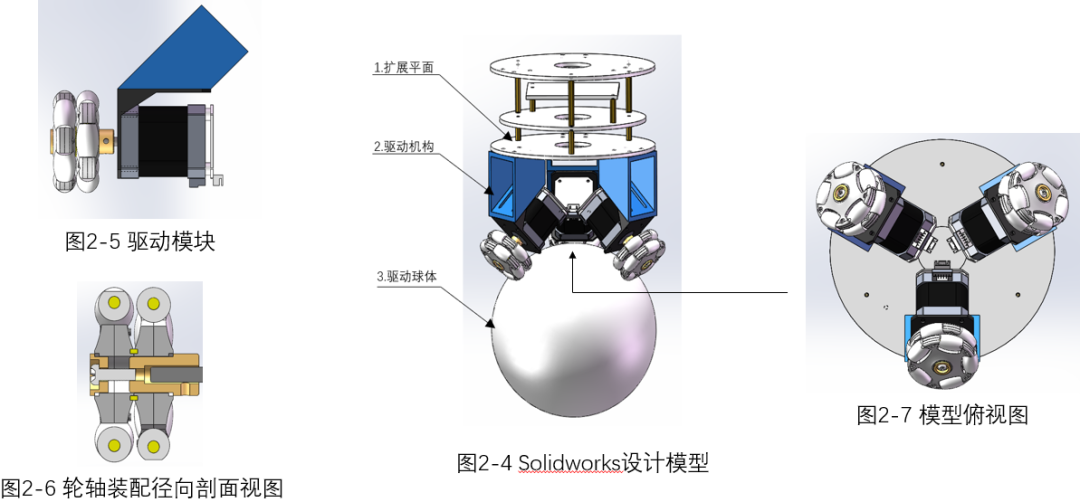
機(jī)器人使用solidworks設(shè)計(jì)整體結(jié)構(gòu),底板可在某寶定制6050太空鋁切割,藍(lán)色件為正常3D打印件。
程序部分
在keil 5中開發(fā)STM32。
控制程序采用定時(shí)器0.5ms定時(shí)中斷的方式進(jìn)行計(jì)算,每觸發(fā)兩次中斷計(jì)算對電機(jī)控制一次,這里還是推薦大家采用外部中斷讀取GY-521上的INT引腳的方式,控制計(jì)算周期。GY-521上的INT引腳每5ms觸發(fā)一次跳變,采用外部中斷的方式可以嚴(yán)格保證讀取位姿數(shù)據(jù)與計(jì)算處理同步。
對于電機(jī)控制,由于采用的驅(qū)動(dòng)方案是步進(jìn)電機(jī),調(diào)速的方式是改變驅(qū)動(dòng)步進(jìn)電機(jī)的脈沖頻率。我這里選擇了三個(gè)定時(shí)器,動(dòng)態(tài)調(diào)節(jié)定時(shí)器的頻率,具體方式是在初始化時(shí)設(shè)定好定時(shí)器的預(yù)分頻系數(shù)psc的值,然后在程序里動(dòng)態(tài)更改ARR寄存器的值,從而改變定時(shí)器的定時(shí)頻率。int TIM1_UP_IRQHandler (void){u8 key_cal;if(TIM_GetITStatus(TIM1,TIM_IT_Update) != RESET){TIM_ClearITPendingBit(TIM1,TIM_IT_Update);flag_target=!flag_target;key_cal=KEY_Scan(0);if(state_flag==1)//矯正結(jié)束{if(flag_target==1)//每讀取兩次陀螺儀控制一次{Read_DMP(); //===讀取傾角scope();return 0;}}if(key_cal==1)//矯正按鍵{Angle_Zero_X=Angle_Balance_X;Angle_Zero_Y=Angle_Balance_Y;key_cal=0;Flag_Stop=0;}if(key_cal==2||key_cal==3)//矯正按鍵{Flag_Stop=1;//關(guān)閉速度環(huán)I積分key_cal=0;}Angle_Bias_X =Angle_Balance_X-Angle_Zero_X; //獲取Y方向的偏差Angle_Bias_Y =Angle_Balance_Y-Angle_Zero_Y; //獲取Y方向的偏差if(control_mode==0)//PID控制模式{Encoder_Analysis(Motor_A,Motor_B,Motor_C); //正運(yùn)動(dòng)學(xué)分析,得到X Y方向的速度Balance_Pwm_X= balance_X(Angle_Bias_X,Gyro_Balance_X);//X方向的傾角控制Balance_Pwm_Y=-balance_Y(Angle_Bias_Y,Gyro_Balance_Y); //Y方向的傾角控制// if(++flag_target_2==4)//速度環(huán)頻率慢于加速度環(huán) 但是還沒加速度環(huán)// {Velocity_Pwm_X=velocity_X(compute_X); //X方向的速度控制Velocity_Pwm_Y=velocity_Y(compute_Y); //Y方向的速度控制// flag_target_2=0;// }Move_X =Balance_Pwm_X+Velocity_Pwm_X; //===X方向控制量累加Move_Y =Balance_Pwm_Y+Velocity_Pwm_Y; //===Y方向控制量累加Move_Z=0;Kinematic_Analysis(Move_X,Move_Y,Move_Z);//逆運(yùn)動(dòng)學(xué)分析得到ABC電機(jī)控制量}Motor_A=Target_A;//直接調(diào)節(jié)PWM頻率Motor_B=Target_B;//直接調(diào)節(jié)PWMMotor_C=Target_C;//直接調(diào)節(jié)PWM//以下都是為了速度連續(xù)化處理防止突變if(Motor_A==0) Motor_A=motor_a_last;if(Motor_B==0) Motor_B=motor_b_last;if(Motor_C==0) Motor_C=motor_c_last;Xianfu_Pwm(2000);Set_Pwm(Motor_A,Motor_B,Motor_C);Gyro_Balance_X_last=Gyro_Balance_X;Gyro_Balance_Y_last=Gyro_Balance_Y;Gyro_Balance_Z_last=Gyro_Balance_Z;Angle_Balance_X_last=Angle_Balance_X;Angle_Balance_Y_last=Angle_Balance_Y;Angle_Balance_Z_last=Angle_Balance_Z;motor_a_last=Motor_A;motor_b_last=Motor_B;motor_c_last=Motor_C;}return 0;}
//這里以A電機(jī)的速度控制為例 輸入為 電機(jī)方向和電機(jī)速度void set_motorA_speed(u8 dir,u16 speed){u32 arr;arr=speed;TIM_ARRPreloadConfig(TIM3,DISABLE);TIM3->ARR=arr;//計(jì)數(shù)到10000在歸零重新計(jì)數(shù)TIM3->CCR4=arr/2;//保持占空比為50%TIM_ARRPreloadConfig(TIM3,ENABLE);TIM_Cmd(TIM3,ENABLE);if(dir==0){GPIO_SetBits(GPIOA,GPIO_Pin_1);}else{GPIO_ResetBits(GPIOA,GPIO_Pin_1);}}
小車的運(yùn)動(dòng)學(xué)分解代碼實(shí)現(xiàn)如下,參考了平衡小車之家的代碼:
其余代碼不全放出,可在文末點(diǎn)擊“閱讀原文”下載查看。/**********************************************************函數(shù)功能:小車運(yùn)動(dòng)數(shù)學(xué)模型入口參數(shù):X Y Z 三軸速度或者位置返回 值:無***********************************************************/void Kinematic_Analysis(float Vx,float Vy,float Vz){Target_A = Vx + L_PARAMETER*Vz;Target_B = -X_PARAMETER*Vx + Y_PARAMETER*Vy + L_PARAMETER*Vz;Target_C = -X_PARAMETER*Vx - Y_PARAMETER*Vy + L_PARAMETER*Vz;}/*****************************************************************函數(shù)功能:小車運(yùn)動(dòng) 正運(yùn)動(dòng)學(xué)分析入口參數(shù):A B C三個(gè)電機(jī)的速度返回 值:無******************************************************************/void Encoder_Analysis(float Va,float Vb,float Vc){compute_X=(Va*2-Vb-Vc);compute_Y=((Vb-Vc)*sqrt(3));compute_Z=(Va+Vb+Vc);}
總結(jié)與展望
球上自平衡機(jī)器人可以作為算法試驗(yàn)平臺, 輸入輸出固定,更換不同控制器,將數(shù)據(jù)導(dǎo)入MATLAB進(jìn)行分析即可比較控制器性能。
個(gè)人認(rèn)為結(jié)構(gòu)有兩個(gè)改進(jìn)方向,一方面參考以下論文:余義. 單球驅(qū)動(dòng)自平衡機(jī)器人位姿解算與控制系統(tǒng)研究[D].武漢科技大學(xué),2019。論文中采用的四足式驅(qū)動(dòng)結(jié)構(gòu)更有利于機(jī)器人自平衡控制。
另一方面可以增加球體和機(jī)器人固定裝置,利用機(jī)械結(jié)構(gòu)將機(jī)器人與底部驅(qū)動(dòng)球結(jié)合成一個(gè)整體防止機(jī)器人跳輪等問題。同時(shí)驅(qū)動(dòng)球?qū)τ跈C(jī)器人平衡的影響較大,最好還是定制空心鋼球,然后噴漆增大摩擦力,最有利于機(jī)器人自平衡控制。
控制部分的改進(jìn),首先是控制原理,本文是針對建立好的運(yùn)動(dòng)學(xué)方程進(jìn)行分析,通過串級PID算法來實(shí)現(xiàn)自平衡運(yùn)動(dòng)。該機(jī)器人的控制問題本質(zhì)上是一階倒立擺問題,可以采用動(dòng)力學(xué)建模的方式,通過動(dòng)力學(xué)分析算出平衡需要的虛擬力矩,再對電機(jī)進(jìn)行力矩控制。
其次是控制器,PID控制算法應(yīng)用廣泛但也有一定的缺點(diǎn),可以考慮采用模糊PID,ADRC自抗擾控制器,強(qiáng)化學(xué)習(xí)等智能控制算法對機(jī)器人自平衡進(jìn)行控制,更多畢設(shè)項(xiàng)目資料可以點(diǎn)擊此處了解。
原文標(biāo)題:STM32自平衡機(jī)器人項(xiàng)目,附代碼、電路圖等資料
文章出處:【微信公眾號:STM32嵌入式開發(fā)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
-
控制器
+關(guān)注
關(guān)注
112文章
16332瀏覽量
177808 -
機(jī)器人
+關(guān)注
關(guān)注
211文章
28380瀏覽量
206916 -
STM32
+關(guān)注
關(guān)注
2270文章
10895瀏覽量
355739 -
開源
+關(guān)注
關(guān)注
3文章
3309瀏覽量
42471
原文標(biāo)題:STM32自平衡機(jī)器人項(xiàng)目,附代碼、電路圖等資料
文章出處:【微信號:c-stm32,微信公眾號:STM32嵌入式開發(fā)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
怎樣去制作一種球上自平衡機(jī)器人
基于 ATMega328p-PU 的迷你平衡機(jī)器人設(shè)計(jì)
如何利用EDA軟件去設(shè)計(jì)一種球上自平衡機(jī)器人呢
制作一個(gè)迷你平衡機(jī)器人
畢業(yè)設(shè)計(jì)--球上自平衡機(jī)器人






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論