 stm32裸機RT—thread開始創建線程詳解
stm32裸機RT—thread開始創建線程詳解
在裸機系統 中,他們統統放在一個叫棧的地方,棧是單片機RAM里面一段連續的內存空間,棧的大小一般在啟動文件或者鏈接腳 本里面指定,最后由C庫函數_main進行初始化。
在多線程系統中,每個線程都是獨立的,互不干擾的,所以要為每個線程都分配獨立的棧空間,這個棧空間通常是一個預先定義好的全局數組,也可以是動態分配的一段內存空間,但它們都存在于RAM中。
創建線程棧,需要幾個線程創建幾個線程棧,這里線程棧實際上就是全局變量,大小為512,這里創建兩個工作線程,如下:
ALIGN(RT_ALIGN_SIZE)//
/* 定義線程棧*/
rt_uint8_t rt_flag1_thread_stack[512];
rt_uint8_t rt_flag2_thread_stack[512];
ALIGN是一個 帶參宏,在rtdef.h中定義,設置變量需要多少個字節對齊,對在它下面的變量起作用。RT_ALIGN_SIZE是一個在rtconfig.h(rtconfig.h第一次使用需要在User文件夾下面新建然后添加到工程user這個組文件)中定義 的宏,默認為4,表示4個字節對齊。
#ifndef __RTTHREAD_CFG_H__
#define __RTTHREAD_CFG_H__
#define RT_THREAD_PRIORITY_MAX 32 /* 最大優先級 */
#define RT_ALIGN_SIZE 4 /* 多少個字節對齊 */
#endif /* __RTTHREAD_CFG_H__ */
下一步,定義線程函數:
這里我們建立線程函數,并給函數命名flag1_thread_entry,flag2_thread_entry兩個函數 ,分別代表著兩個無限循環不返回的線程
/* 軟件延時 */
void delay (uint32_t count)
{
for(; count!====0; count--);
}
/* 線程1 */
void flag1_thread_entry( void *p_arg )// (1)
{
for( ;; )
{
flag1 ==== 1;
delay( 100 );
flag1 ==== 0;
delay( 100 );
/* 線程切換,這里是手動切換 */
rt_schedule();
}
}
/* 線程2 */
void flag2_thread_entry( void *p_arg )// (2)
{
for( ;; )
{
flag2 ==== 1;
delay( 100 );
flag2 ==== 0;
delay( 100 );
/* 線程切換,這里是手動切換 */
rt_schedule();
}
}
下一步定義線程控制塊
在裸機系統中,程序的主體是CPU按照順序執行的。而在多線程系統中,線程的執行是由系統調度的。系統為了順利的調度線程,為每個線程都額外定義了一個線程控制塊,這個線程控制塊就相當于線程的身份證,里面存有線程的所有信息,比如線程的棧指針,線程名稱,線程的形參等。有了這個線程控制塊之后,以后系統對線程的全部操作都可以通過這個線程控制塊來實現。定義一個線程控制塊需要一個新的數據類型,該數據類型在rtdef.h這個頭 文件中聲明,使用它可以為每個線程都定義一個線程控制塊實體。下面來看一下,此結構體定義函數及內容:
struct rt_thread
{
void *sp; /* 線程棧指針 */
void *entry; /* 線程入口地址 */
void *parameter; /* 線程形參 */
void *stack_addr; /* 線程起始地址 */
rt_uint32_t stack_size; /* 線程棧大小,單位為字節 */
rt_list_t tlist; /* 線程鏈表節點 */
};
typedef struct rt_thread *rt_thread_t;//
我們在main.c文件中為兩個線程定義的線程控制塊。
/* 定義線程控制塊 */
struct rt_thread rt_flag1_thread;
struct rt_thread rt_flag2_thread;
下一步,創建線程實現函數
線程的棧,線程的函數實體,線程的控制塊最終需要聯系起來才能由系統進行統一調度。那么這個聯系的工作就由線 程初始化函數rt_thread_init()來實現,該函數在thread.c(thread.c第一次使用需要自行在文件夾rtthread/3.0.3/src中新建并添加到工程的rtt/source組)中定義,在rtthread.h中聲明,所有跟線程相關的函數都在這個文件定義。rt_thread_init()函數的實現如下 :
rt_err_t rt_thread_init(struct rt_thread *thread,// (1)
void (*entry)(void *parameter),// (2)
void *parameter,// (3)
void *stack_start,// (4)
rt_uint32_t stack_size)// (5)
{
rt_list_init(&(thread->tlist));// (6)
thread->entry ==== (void *)entry;// (7)
thread->parameter ==== parameter;// (8)
thread->stack_addr ==== stack_start;// (9)
thread->stack_size ==== stack_size;// (10)
/* 初始化線程棧,并返回線程棧指針 */ // (11)
thread->sp ==== (void *)rt_hw_stack_init( thread->entry,
thread->parameter,
(void *)((char *)thread->stack_addr + thread->stack_size - 4) );
return RT_EOK;// (12)
}
(1) :thread是線程控制塊指針。
(2) :entry 是線程函數名, 表示線程的入口。
(3) :parameter是線程形參,用于傳遞線程參數。
(4) :stack_start 用于指向線程棧的起始地址。
(5) :stack_size表示線程棧的大小,單位為字節。
(7) :將線程入口保存到線程控制塊的entry成員中。
(8) :將線程入口形參保存到線程控制塊的parameter成員中。
(9) :將線程棧起始地址保存到線程控制塊的stack_start成員中。
(10) :將線程棧起大小保存到線程控制塊的stack_size成員中。
(11) :初始化線程棧,并返回線程棧頂指針。
rt_hw_stack_init()用來初始化線程棧, 當線程第一次運行的時候,加載到CPU寄存器的參數就放在線程棧里面,該函數在cpuport.c中實現。cpuport.c第一次使用需要自行 在rtthread/3.0.3/ libcpu/arm/cortex-m3(cortex-m4或cortex-m7)文件夾下新建,然后添加到工程 的rtt/ports組中。
下一步,定義鏈表節點數據類型:
struct rt_list_node
{
struct rt_list_node *next; /* 指向后一個節點 */
struct rt_list_node *prev; /* 指向前一個節點 */
};
typedef struct rt_list_node rt_list_t;
rt_list_t 類型的節點里面有兩個rt_list_t類型的節點指針next和prev,分別用來指向鏈表中的下一個節點和上一個節點。
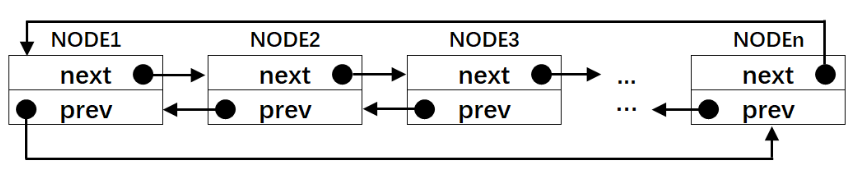 雙向鏈表輪詢示意圖
雙向鏈表輪詢示意圖雙向鏈表的相關操作,這些函數均在rtservice.h中實現,rtservice.h第一次使用需要自行在rtthread/3.0.3/include文件夾下新建,然后添加到工程的rtt/source組中。下面從鏈表操作逐步實現。
鏈表節點初始化:
rt_inline void rt_list_init(rt_list_t *l)
{
l->next ==== l->prev ==== l;
}
實際上進行了如下操作:
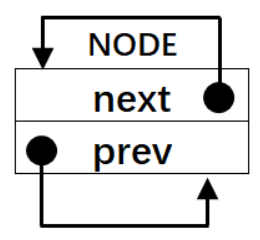 鏈表初始化示意圖
鏈表初始化示意圖下面在鏈表頭部和尾部分別插入一個鏈表節點:
表頭后面插入一個節點
/* 在雙向鏈表頭部插入一個節點*/
rt_inline void rt_list_insert_after(rt_list_t *l, rt_list_t *n)
{
l->next->prev ==== n; /* 第 1 步*/
n->next ==== l->next; /* 第 2 步*/
l->next ==== n; /* 第 3 步*/
n->prev ==== l; /* 第 4 步*/
}
表頭前邊插入一個節點
rt_inline void rt_list_insert_before(rt_list_t *l, rt_list_t *n)
{
l->prev->next ==== n; /* 第 1 步*/
n->prev ==== l->prev; /* 第 2 步*/
l->prev ==== n; /* 第 3 步*/
n->next ==== l; /* 第 4 步*/
}
從雙向鏈表刪除一個節點
rt_inline void rt_list_remove(rt_list_t *n)
{
n->next->prev ==== n->prev; /* 第 1 步*/
n->prev->next ==== n->next; /* 第 2 步*/
n->next ==== n->prev ==== n; /* 第 3 步*/
}
創建線程初始化函數
/* 線程棧初始化 */
rt_uint8_t *rt_hw_stack_init(void *tentry,// (1)
void *parameter,// (2)
rt_uint8_t *stack_addr)// 線程棧頂地址-4,在該函數調用的時候傳進來的是線程棧的棧頂地址-4
{
struct stack_frame *stack_frame;// (4)
rt_uint8_t *stk;
unsigned long i;
/* 獲取棧頂指針
rt_hw_stack_init 在調用的時候,傳給stack_addr的是(棧頂指針)*/
stk ==== stack_addr + sizeof(rt_uint32_t);// (5)
/* 讓stk指針向下8字節對齊 */
stk ==== (rt_uint8_t *)RT_ALIGN_DOWN((rt_uint32_t)stk, 8);// (6)
/* stk指針繼續向下移動sizeof(struct stack_frame)個偏移 */
stk -==== sizeof(struct stack_frame);// (7)
/* 將stk指針強制轉化為stack_frame類型后存到stack_frame */
stack_frame ==== (struct stack_frame *)stk;// (8)
/* 以stack_frame為起始地址,將棧空間里面的sizeof(struct stack_frame)
個內存初始化為0xdeadbeef */
for (i ==== 0; i < sizeof(struct stack_frame) / sizeof(rt_uint32_t); i ++)// (9)
{
((rt_uint32_t *)stack_frame)[i] ==== 0xdeadbeef;
}
/* 初始化異常發生時自動保存的寄存器 */// (10)
stack_frame->exception_stack_frame.r0 ==== (unsigned long)parameter; /* r0 : argument */
stack_frame->exception_stack_frame.r1 ==== 0; /* r1 */
stack_frame->exception_stack_frame.r2 ==== 0; /* r2 */
stack_frame->exception_stack_frame.r3 ==== 0; /* r3 */
stack_frame->exception_stack_frame.r12 ==== 0; /* r12 */
stack_frame->exception_stack_frame.lr ==== 0; /* lr */
stack_frame->exception_stack_frame.pc ==== (unsigned long)tentry; /* entry point, pc */
stack_frame->exception_stack_frame.psr ==== 0x01000000L; /* PSR */
/* 返回線程棧指針 */
return stk;// (11)
}
(5) :獲取棧頂指針,將棧頂指針傳給指針stk。rt_hw_stack_init()函數 在rt_thread_init ()函數中調用的時候傳給形參stack_addr的值是棧頂指針減去4,所以現在 加上sizeof(rt_uint32_t)剛好與減掉的4相互抵消,即傳遞給stk的是棧頂指針。
(6) :讓stk這個指針向下8個字節對齊,確保stk是8字節對齊的地址。 在Cortex-M3(Cortex-M4或Cortex-M7)內核的單片機中,因為總線寬度是32位的,通常只要棧保持4字節對齊就 行,可這樣為啥要8字節?難道有哪些操作是64位的?確實有,那就是浮 點運算,所以要8字節對齊(但是目前我們都還沒有涉及到浮點運算,只是為了后續兼容浮點運行的考慮)。 如果棧頂指針是8字節對齊的,在進行向下8字節對齊的時候,指針不會移動,如果不是8字節對齊的, 在做向下8字節對齊的時候,就會空出幾個字節,不會使用,比如當stk是33,明顯不能整除8, 進行向下8字節對齊就是32,那么就會空出一個字節不使用。
(7) :stk指針繼續向下移動sizeof(struct stack_frame) 個偏移,即16個字的大小。
ok!!!!!!!
這些了解了之后,我們在主函數內加入線程初始化即可
/* 初始化線程 */
rt_thread_init(&rt_flag1_thread, /* 線程控制塊 */
flag1_thread_entry, /* 線程入口地址 */
RT_NULL, /* 線程形參 */
&rt_flag1_thread_stack[0], /* 線程棧起始地址 */
sizeof(rt_flag1_thread_stack) ); /* 線程棧大小,單位為字節 */
/* 將線程插入到就緒列表 */
/* 初始化線程 */
rt_thread_init(&rt_flag2_thread, /* 線程控制塊 */
flag2_thread_entry, /* 線程入口地址 */
RT_NULL, /* 線程形參 */
&rt_flag2_thread_stack[0], /* 線程棧起始地址 */
sizeof(rt_flag2_thread_stack) ); /* 線程棧大小,單位為字節 */
審核編輯:符乾江
-
嵌入式
+關注
關注
5082文章
19115瀏覽量
304927 -
線程機制
+關注
關注
0文章
2瀏覽量
5596 -
RT Thread操作系統
+關注
關注
0文章
4瀏覽量
695
發布評論請先 登錄
相關推薦

為什么在rt-thread studio創建不了gd32的項目?
線程創建成功了,為啥ai_thread_entry()函數不運行呢?
stm32cubmx生成的makefile編譯無法啟動線程怎么解決?
玩轉RT-Thread之消息隊列的應用

使用rt_thread_mdelay函數后出現hardfault的原因?
rt-thread是如何在線程運行結束后識別到的呢?
RT-thread中運行了好多個線程,有的線程很長時間不執行是什么原因?
【從0開始創建AWTK應用程序】編譯應用到RTOS平臺






 工商網監
工商網監
評論