 MEMS中計步器的工作原理分析
MEMS中計步器的工作原理分析
6 軸慣性模塊LSM6DSL 或 LSM6DSM,以及eCompass LSM303AH. 這些 MEMS(微機電系統)因其精確的傳感器而深受移動設備制造商的歡迎。它們還可以從主 MCU 卸載一些計算,并且它們消耗的能量非常少(在低功耗模式下僅為 0.4 μA)。它們的特別之處在于兩者都可以充當計步器,這意味著設備可以跟蹤用戶的跑步或步行步數,而對性能或電池壽命的影響很小。為了更好地了解 ST 如何能夠以最小的封裝提供如此強大的功能,讓我們了解計步器的工作原理。
LSM6DSL/M 和 LSM303AH 都使用加速度計,通過測量電勢的變化來感知運動。當用戶邁出一步時,一個由硅制成并附在錨上的自由元件沿感應的方向移動。當它移動時,它會接近或遠離基礎結構,這會影響它們的電容。這足以測量速度變化,還可以測量絕對手腕傾斜和相對傾斜。 數據在標準 SPI 或 I2C 串行總線上以數字形式輸出到主機 MCU。
自定義計步器
ST 的組件很特別,因為它們不僅可以感應運動,還包括特殊的硬件單元來處理加速度計收集的數據。例如,計步器功能有自己特定的 IP 塊。因此,當 MEMS 檢測到運動時,該單元使用專有算法處理信息以確定它是否對應于一個步驟,而無需使用主機 MCU 的資源。ST 甚至允許工程師通過更改“去抖動步驟”和“最小閾值”來調整算法的某些方面。
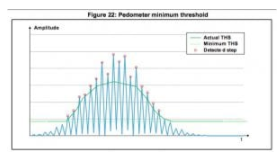
最小閾值如何影響計步器
去抖步數是在計數器開始增加之前必須檢測到的最小連續步數。如果沒有這個功能,就無法區分真假步驟。例如,如果一個人在跑步時必須在人行橫道上停下來,那么在等待信號改變時計算所做的動作是沒有意義的。去抖動步驟可以確保計數器僅在用戶恢復其步伐時才增加。工程師還可以自定義最小閾值,這意味著可以作為一個步驟的最小力。因此,開發人員可以創建具有針對各種活動調整的特定設置的不同配置文件,以更準確地測量步驟并產生有意義的結果。
系統優化
每檢測到一步,計步器就會向計步器發送一個中斷。中斷是傳輸到特定組件(通常是主機)的信號,指示事件需要其注意。在該系統中,計步器使用其 INT1 引腳(LSM6DSL 和 LSM6DSM)向主機上的特定引腳發送中斷。因此,主機的其余部分可以處于睡眠模式,或執行其他任務,而只有一小部分架構檢測到中斷的存在,對其進行處理,并決定是否需要喚醒 MCU 的其余部分。該系統還確保數據采集過程的同步,以避免任何信息丟失。
例如,可以僅在超過去抖動步驟后才發送中斷,以確保系統不會在瑣碎的運動上浪費能量。隨著越來越多的用戶戴著健身手環睡覺,浪費電池壽命試圖測量睡著時發生的小而零星的手勢將毫無意義。通過正確設置系統的去抖步長和最小閾值,工程師可以確保沒有中斷喚醒系統,即使用戶在睡眠期間移動。
模塊化效率
在一個移動設備中同時包含 6 軸慣性模塊和指南針是很常見的。因此,ST 為什么選擇在兩者中都包含一個加速度計和一個特定的計步器單元?原因是它們是模塊化的,這意味著可以同時使用它們以獲得更高的精度,或者禁用一個加速度計以節省能量,同時仍然受益于強大的計步器。這種設計還允許更大的靈活性。例如,如果其中一個組件已經關閉,系統仍然可以依靠喚醒組件的計步器 IP 來計算步數,無論它是哪一個。
審核編輯:郭婷
-
mems
+關注
關注
129文章
3934瀏覽量
190681 -
ST
+關注
關注
32文章
1133瀏覽量
128967 -
加速度計
+關注
關注
6文章
702瀏覽量
45901
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論