") EtherCAT運(yùn)動(dòng)控制器(三)PLC實(shí)現(xiàn)多軸直線插補(bǔ)
EtherCAT運(yùn)動(dòng)控制器(三)PLC實(shí)現(xiàn)多軸直線插補(bǔ)
XPLC006E功能簡(jiǎn)介
XPLC006E是正運(yùn)動(dòng)運(yùn)動(dòng)控制器推出的一款多軸經(jīng)濟(jì)型EtherCAT總線運(yùn)動(dòng)控制器,XPLC系列運(yùn)動(dòng)控制器可應(yīng)用于各種需要脫機(jī)或聯(lián)機(jī)運(yùn)行的場(chǎng)合。
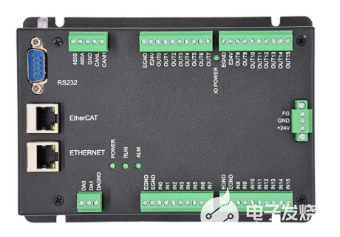
XPLC006E自帶6個(gè)電機(jī)軸,最多12軸運(yùn)動(dòng)控制(含虛擬軸數(shù)),支持12軸直線插補(bǔ)、電子凸輪、電子齒輪、同步跟隨、虛擬軸設(shè)置等功能。
XPLC006E支持多任務(wù)同時(shí)運(yùn)行,同時(shí)可以在PC上直接仿真運(yùn)行,編程方式多種可選,支持ZDevelop軟件的Basic/PLC梯形圖/HMI組態(tài)和常用上位機(jī)軟件編程。
XPLC006E只支持EtherCAT總線軸,不支持脈沖軸和編碼器軸。采用EtherCAT總線與驅(qū)動(dòng)器通訊,1ms的刷新周期。
XPLC006E支持PLC、Basic、HMI組態(tài)三種編程方式。PC上位機(jī)API編程支持C#、C++、LabVIEW、VB、matlab、Qt、Linux、.Net、iMAC、Python、 ROS等接口。
→此款產(chǎn)品有XPLC004E、XPLC006E、XPLC008E三個(gè)不同軸數(shù)的型號(hào)可選。
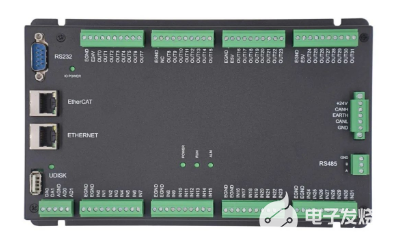
XPLC864E2功能簡(jiǎn)介
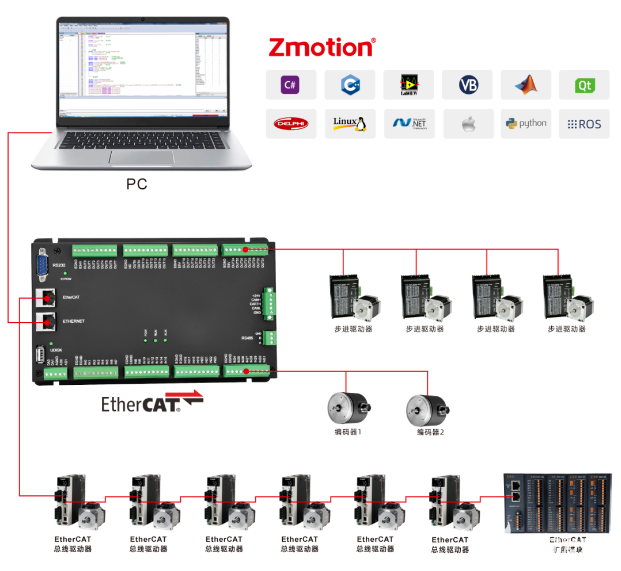
XPLC864E2在XPLC006E的功能基礎(chǔ)上做了升級(jí)(即上節(jié)介紹的XPLC006E的功能都支持),部分資源空間優(yōu)于XPLC006E,使用方法基本一致,不同之處在于XPLC864E2,硬件支持32點(diǎn)輸入、32點(diǎn)輸出、2個(gè)ADC、2個(gè)DAC,支持脈沖軸和總線軸混合使用,總實(shí)軸軸數(shù)為8,除了帶EtherCAT接口之外,輸出口硬件上可配置為8個(gè)軸的脈沖方向信號(hào)輸出,另帶兩路編碼器輸入,可由輸入口配置。
XPLC864E2支持PLC、Basic、HMI組態(tài)三種編程方式。PC上位機(jī)API編程支持C#、C++、LabVIEW、VB、matlab、Qt、Linux、.Net、iMAC、Python、 ROS等接口。
XPLC系列經(jīng)濟(jì)型EtherCAT總線運(yùn)動(dòng)控制器支持多種編程方式,支持使用正運(yùn)動(dòng)技術(shù)自主研發(fā)的ZDevelop開發(fā)環(huán)境的basic語(yǔ)言和PLC梯形圖,上一節(jié)講解了Basic開發(fā),本節(jié)內(nèi)容主要講解PLC梯形圖的開發(fā)。
XPLC006E使用PLC編程時(shí),軸的運(yùn)動(dòng)指令調(diào)用Basic封裝的指令。
PLC梯形圖執(zhí)行從左側(cè)的母線開始,從左至右,從上至下依次掃描,從第一行程序開始順序掃描到END為一個(gè)掃描周期,然后又開始新一輪程序掃描,直到程序被停止。
PLC編程方式有兩種,通常選擇梯形圖編程,熟悉指令的用戶也可選擇語(yǔ)句表的編程方式。
一前期準(zhǔn)備工作
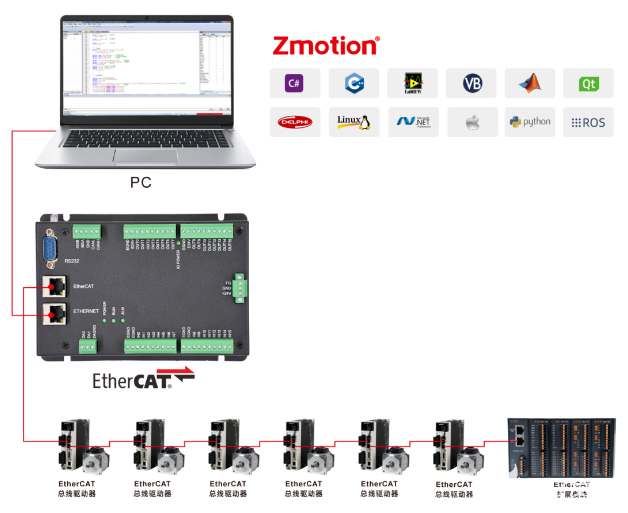
在正運(yùn)動(dòng)技術(shù)官網(wǎng)下載新版編程軟件ZDevelopV3.10.06,準(zhǔn)備一臺(tái)XPLC系列經(jīng)濟(jì)型EtherCAT總線運(yùn)動(dòng)控制器,按照上方的XPLC006E參考架構(gòu)完成接線。
沒(méi)有控制器的場(chǎng)合也可完成ZBasic的開發(fā),程序下載到仿真器運(yùn)行即可,仿真器是ZDevelop軟件安裝包自帶的。
二下載PLC程序到控制器
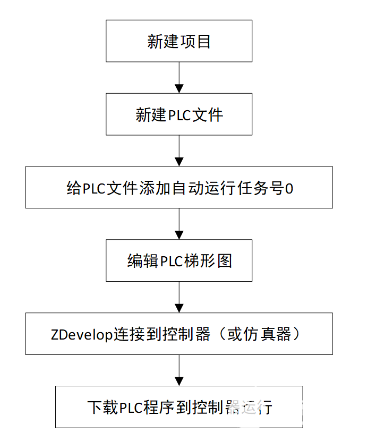
1.新建工程項(xiàng)目,并下載PLC程序文件到控制器運(yùn)動(dòng)的流程如下圖。
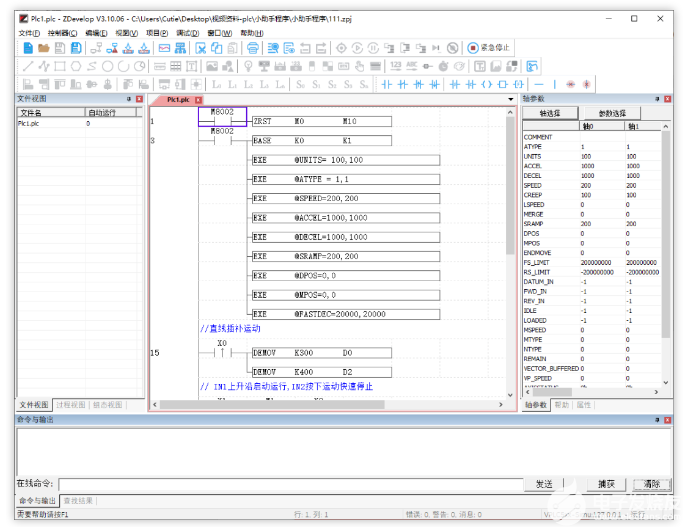
2.打開已有的項(xiàng)目文件運(yùn)行,需要打開zpj文件,再連接控制器,下載程序運(yùn)動(dòng)。PLC編程界面如下所示:
PLC的自動(dòng)運(yùn)行的主文件建議只設(shè)置一個(gè),使得PLC只有一個(gè)主循環(huán),其他模塊在主循環(huán)中調(diào)用。
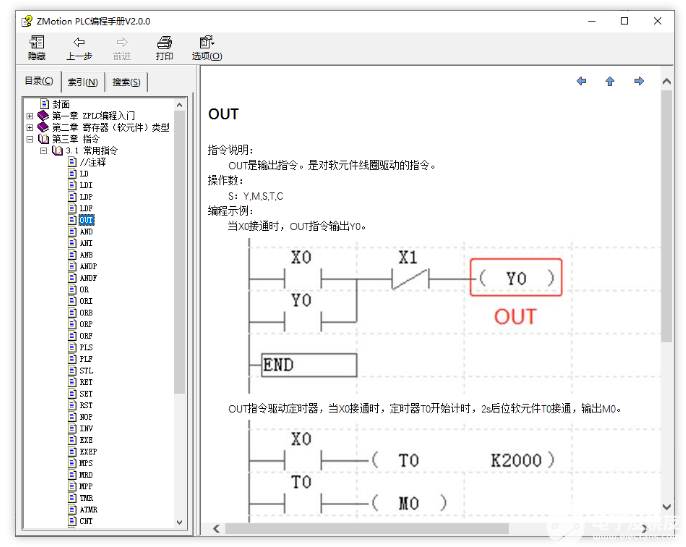
PLC指令均不分大小寫,PLC指令請(qǐng)參考《ZMotion PLC編程手冊(cè)》,手冊(cè)可在軟件的幫助菜單欄快速打開。
三PLC梯形圖編程
梯形圖編程方式就是使用順序符號(hào)和軟元件編號(hào)在編程界面上畫出順控梯形圖的方式,由于順控回路是通過(guò)觸點(diǎn)符號(hào)和線圈符號(hào)來(lái)表現(xiàn)的,顯示更加直觀,程序的內(nèi)容更易理解。
在梯形圖顯示狀態(tài)下程序監(jiān)控與調(diào)試更為便捷,梯形圖顯示示例如下所示。
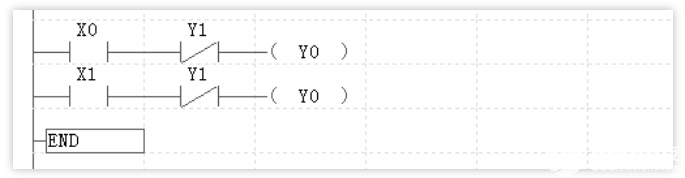
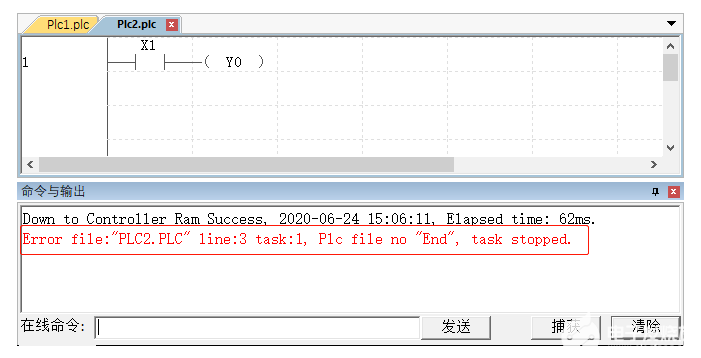
程序結(jié)尾一定要包含END程序結(jié)束指令,否則報(bào)錯(cuò),無(wú)法下載到控制器執(zhí)行。
1.PLC指令按照指令的用途將指令分為如下幾個(gè)類別。
A.常用指令:包含取觸點(diǎn)、輸出線圈、定時(shí)器、計(jì)數(shù)器等常用指令。B.觸點(diǎn)比較指令:比較兩個(gè)寄存器的值,滿足條件觸點(diǎn)導(dǎo)通。C.傳送和比較指令:寄存器之間數(shù)據(jù)按規(guī)則比較和傳送。D.循環(huán)和跳轉(zhuǎn)指令:包括條件循環(huán)指令,跳轉(zhuǎn)到子程序執(zhí)行指令。E.運(yùn)算指令:包含四則運(yùn)算和邏輯運(yùn)算指令。F.移位指令:將源操作數(shù)的數(shù)據(jù)按位移動(dòng)。G.?dāng)?shù)據(jù)處理指令:執(zhí)行其他運(yùn)算,例如編碼、譯碼等。H.浮點(diǎn)運(yùn)算指令:針對(duì)32位浮點(diǎn)數(shù)的運(yùn)算。
I.其他指令:軸運(yùn)動(dòng)相關(guān)參數(shù)。
2.PLC指令根據(jù)操作數(shù)的位長(zhǎng)分為16位指令和32位指令兩種。
16位數(shù)據(jù)和32位數(shù)據(jù)處理采用不同的指令,除了數(shù)據(jù)長(zhǎng)度不同外,二者其他方面均相同,處理數(shù)據(jù)類型均為有符號(hào)數(shù)。
16位指令:傳送的數(shù)值范圍:-32768 -+32767。
32位指令:傳送的數(shù)值范圍:-2147483648 - +2147483647。32位指令一般占用連續(xù)兩個(gè)16位空間。
3.根據(jù)指令的執(zhí)行方式的不同,分為連續(xù)執(zhí)行型和脈沖執(zhí)行型兩種。
連續(xù)執(zhí)行型:滿足條件,每個(gè)掃描周期都執(zhí)行一次。
脈沖執(zhí)行型:滿足條件,僅執(zhí)行一次。連續(xù)執(zhí)行型指令添加符號(hào)P表示脈沖執(zhí)行型指令。
4.PLC軟元件一覽表。
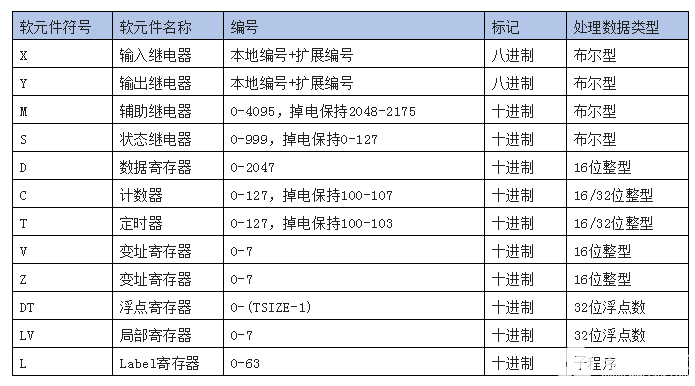
計(jì)數(shù)器C和定時(shí)器T的數(shù)據(jù)類型與訪問(wèn)時(shí)使用的指令有關(guān),通過(guò)16位指令訪問(wèn)時(shí)自動(dòng)使用低16位,通過(guò)32位指令訪問(wèn)時(shí)使用32位。
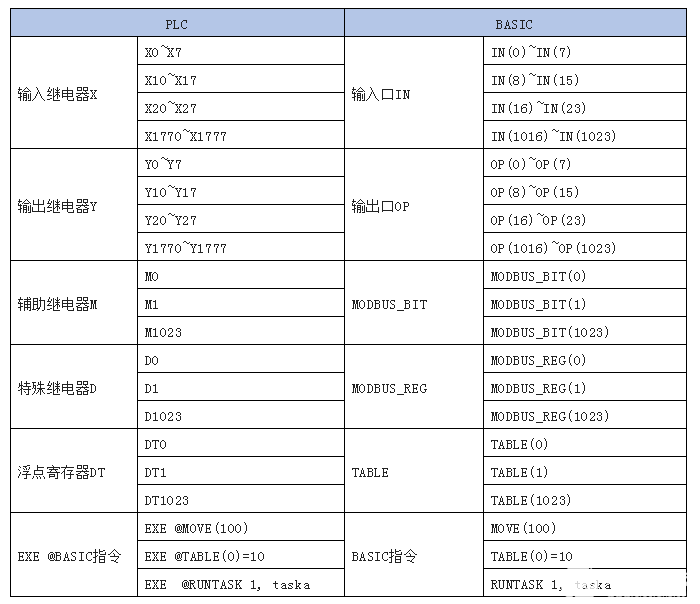
5.PLC與Basic相關(guān)寄存器對(duì)應(yīng)關(guān)系。
四PLC調(diào)用Basic指令
PLC可以通過(guò)EXE指令或EXEP指令調(diào)用Basic標(biāo)準(zhǔn)指令。EXEP指令是EXE指令的脈沖形式,僅在驅(qū)動(dòng)輸入由OFF變?yōu)镺N后,才調(diào)用Basic標(biāo)準(zhǔn)指令。
語(yǔ)法格式如下:
“EXE @BASIC指令”等價(jià)于“BASIC指令”
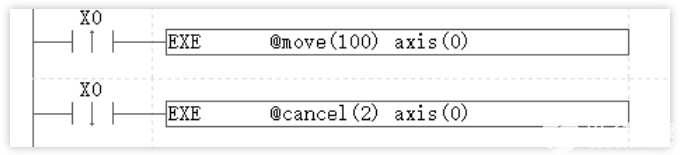
注意:使用EXE指令調(diào)用寄存器時(shí),@之后要參照Basic的語(yǔ)法,不可出現(xiàn)“EXE @DT0=10”,正確寫法應(yīng)是“EXE @TABLE(0)=10”。
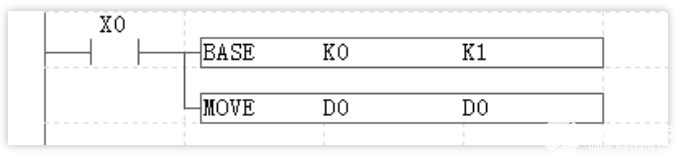
在PLC里調(diào)用Basic直線插補(bǔ)語(yǔ)法如上圖,直線插補(bǔ)PLC語(yǔ)法“MOVE D0 D2”,操作數(shù)應(yīng)該為PLC操作數(shù)支持的格式,插補(bǔ)數(shù)據(jù)由寄存器傳遞,不能直接給出。
五PLC直線插補(bǔ)例程
控制脈沖軸軸0和軸1直線插補(bǔ)運(yùn)動(dòng),軸參數(shù)和運(yùn)動(dòng)指令使用EXE調(diào)用Basic指令,將寫好的程序下載XPLC006E上調(diào)試運(yùn)行。
1.PLC控制程序如下。
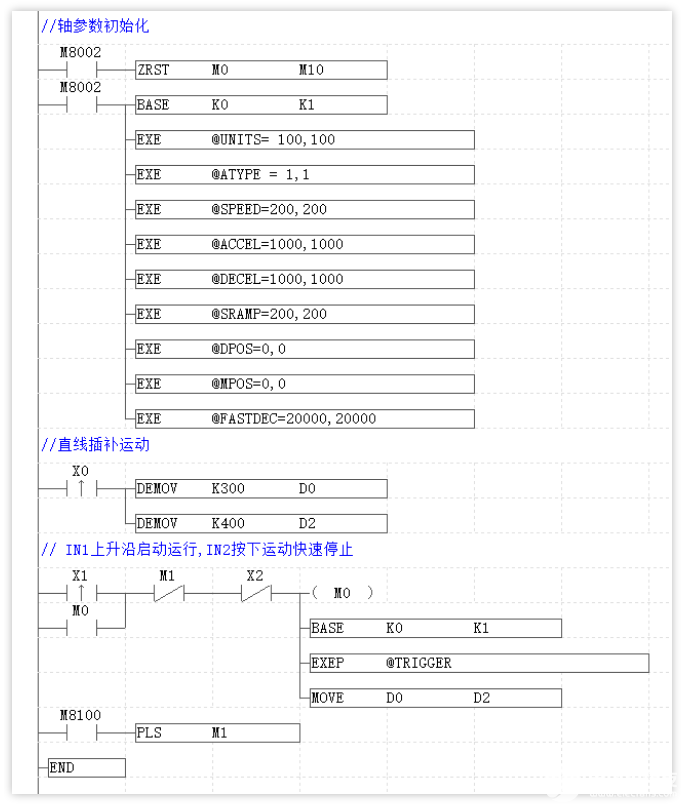
2.程序說(shuō)明。
程序上電初始化時(shí),對(duì)軸的各種參數(shù)進(jìn)行初始化。
當(dāng)X0上升沿觸發(fā)時(shí),對(duì)存儲(chǔ)兩個(gè)軸運(yùn)動(dòng)距離的寄存器D0、D2進(jìn)行賦值,當(dāng)X1上升沿觸發(fā)啟動(dòng)示波器采樣、開啟MOVE直線插補(bǔ)運(yùn)動(dòng)并且M0自鎖,軸0運(yùn)動(dòng)距離為300,軸1運(yùn)動(dòng)距離為400。
M8100為軸0的IDLE標(biāo)志,當(dāng)運(yùn)動(dòng)完成時(shí),軸0停止,M8100變?yōu)镺N,M1被置位一個(gè)周期,M1的常閉觸點(diǎn)斷開一個(gè)周期,M0自鎖取消。
再次按下X1,MOVE再次執(zhí)行軸0軸1直線插補(bǔ)運(yùn)動(dòng)。
X2為急停按鈕,若軸在運(yùn)動(dòng)中按下X2,按FASTDEC快減速設(shè)置的值快速停下。
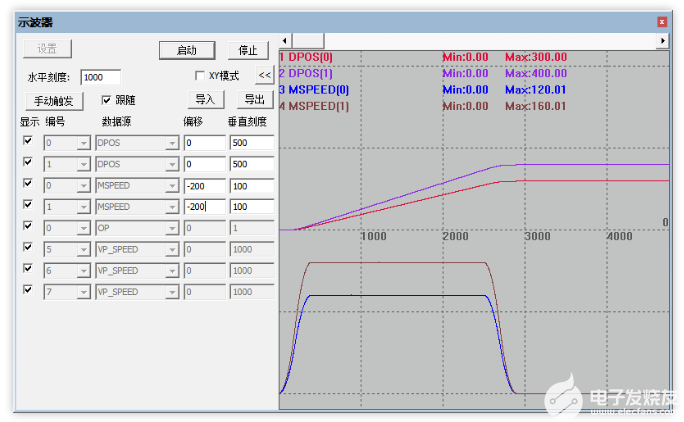
3.示波器采樣的軸0軸1的位置和速度曲線如下所示。
4.以上PLC程序在Basic里實(shí)現(xiàn)的程序如下。
FOR i=0 TO 10 'MODBUS_BIT寄存器清0
MODBUS_BIT(i)=0
NEXT
BASE(0,1) '軸0和軸1參數(shù)初始化
UNITS = 100,100
ATYPE =1,1
SPEED = 200,200
ACCEL = 1000,1000
DECEL = 1000,1000
SRAMP = 200,200
DPOS = 0,0
MPOS = 0,0
FASTDEC = 20000,20000
WHILE 1 '循環(huán)檢測(cè)輸入
IF IN_SCAN(0,2) THEN '掃描IN0-2口電平變化
IF IN_EVENT(1)> 0 THEN '啟動(dòng)
TRIGGER
MOVE(300,400)
ELSEIF IN_EVENT(2)> 0 THEN '停止
RAPIDSTOP(2)
ENDIF
ENDIF
WEND
END
六PLC追剪(電子凸輪)例程
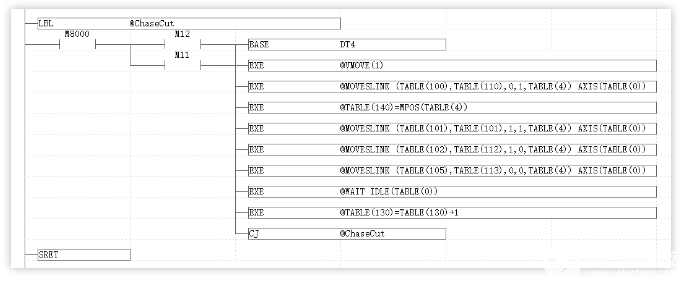
PLC通過(guò)調(diào)用Basic的MOVESLINK自動(dòng)凸輪命令完成追剪過(guò)程,MOVESLINK自動(dòng)凸輪的從軸自動(dòng)規(guī)劃速度跟隨主軸運(yùn)動(dòng),指令用法參見Basic編程手冊(cè),PLC程序的主要組成部分如下:
1.初始化部分
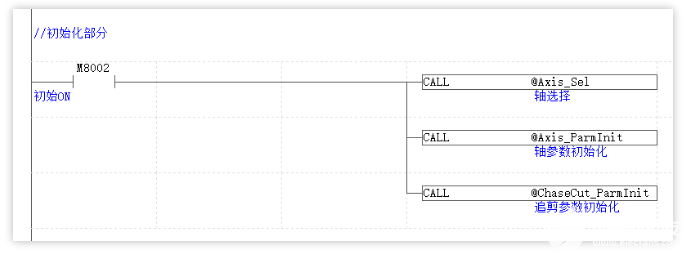
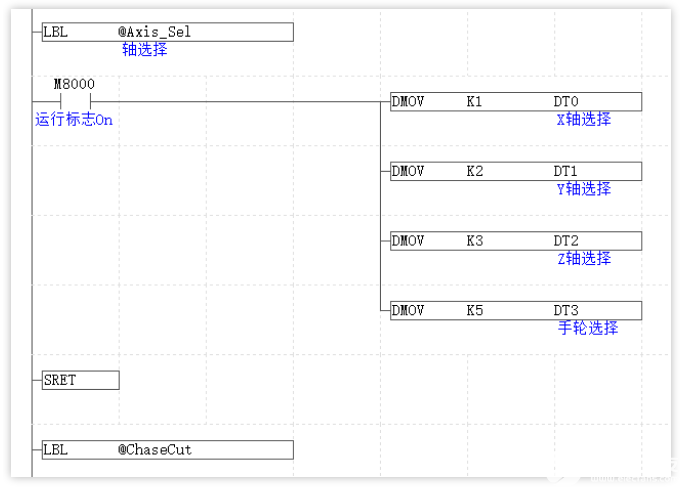
2.選擇追剪軸號(hào)
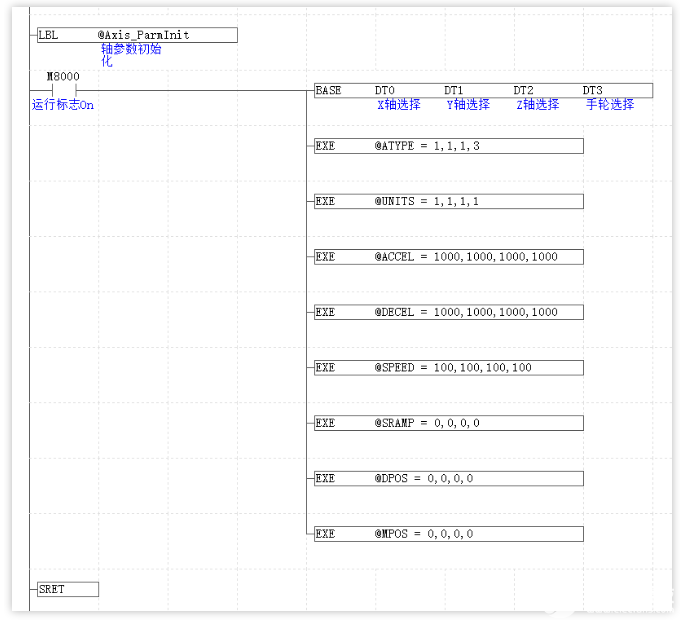
3.軸參數(shù)初始化
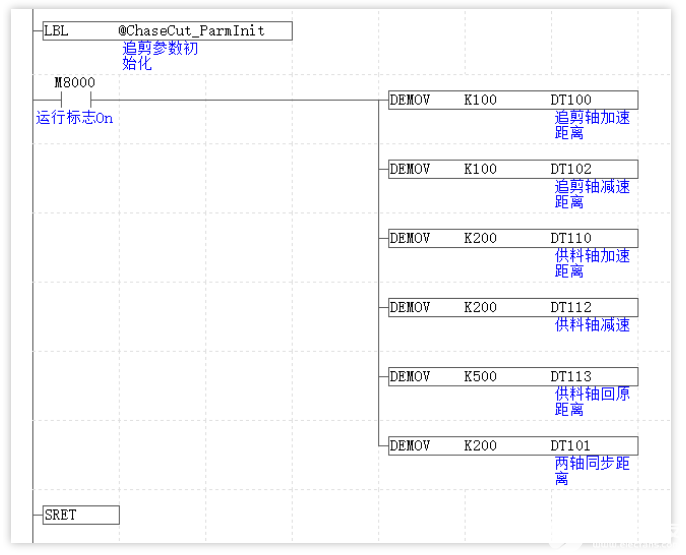
4.追剪參數(shù)初始化
5.追剪運(yùn)動(dòng)
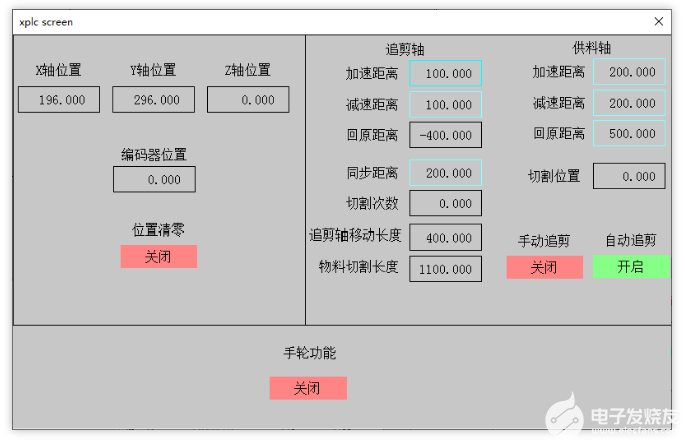
觸摸屏界面:可設(shè)置追剪加工參數(shù),控制追剪的啟停,同時(shí)能顯示當(dāng)前軸的位置信息。
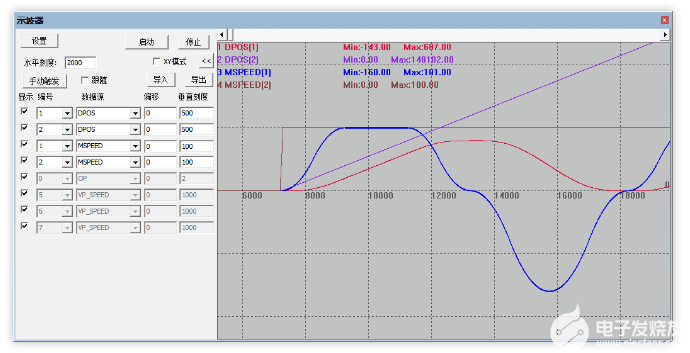
追剪波形如下,主軸為勻速運(yùn)動(dòng)的傳送帶,第一階段從軸(軸1)從初始位置跟隨主軸(軸2)加速運(yùn)動(dòng),第二階段主從軸速度一致,達(dá)到同步,追剪刀具下剪后準(zhǔn)備返回初始位置,第三階段從軸跟隨主軸減速到0,第四階段從軸反向回到初始位置,準(zhǔn)備下一輪追剪。
本次,正運(yùn)動(dòng)技術(shù)經(jīng)濟(jì)型EtherCAT運(yùn)動(dòng)控制器(三):PLC實(shí)現(xiàn)多軸直線插補(bǔ)與電子凸輪,就分享到這里。
本文由正運(yùn)動(dòng)技術(shù)原創(chuàng),歡迎大家轉(zhuǎn)載,共同學(xué)習(xí),一起提高中國(guó)智能制造水平。文章版權(quán)歸正運(yùn)動(dòng)技術(shù)所有,如有轉(zhuǎn)載請(qǐng)注明文章來(lái)源。
審核編輯:符乾江
-
控制器
+關(guān)注
關(guān)注
112文章
16444瀏覽量
179068 -
plc
+關(guān)注
關(guān)注
5016文章
13385瀏覽量
464822 -
運(yùn)動(dòng)控制
+關(guān)注
關(guān)注
4文章
587瀏覽量
32938
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
ZMC600E運(yùn)動(dòng)控制器直線和圓弧插補(bǔ)算法詳解


LabVIEW運(yùn)動(dòng)控制(一):EtherCAT運(yùn)動(dòng)控制器的SCARA機(jī)械手應(yīng)用 #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器
脈沖全閉環(huán)EtherCAT運(yùn)動(dòng)控制器的固件升級(jí)

EtherCAT運(yùn)動(dòng)控制器PT/PVT實(shí)現(xiàn)用戶自定義軌跡規(guī)劃


EtherCAT運(yùn)動(dòng)控制器上位機(jī)之Python+Qt(一):鏈接與單軸運(yùn)動(dòng)# 正運(yùn)動(dòng)技術(shù)# 運(yùn)動(dòng)控制器
EtherCAT運(yùn)動(dòng)控制器與PLC的區(qū)別
多軸控制器與plc的區(qū)別是什么
運(yùn)動(dòng)控制器與plc編程一樣嗎
EtherCAT PLC帶軸數(shù)的限制影響因素
發(fā)一個(gè)單片機(jī)SPI控制的50元起的4軸運(yùn)動(dòng)控制芯片
多軸高性能EtherCAT總線運(yùn)動(dòng)控制器ZMC408CE硬件介紹

EtherCAT運(yùn)動(dòng)控制器在LabVIEW中的運(yùn)動(dòng)控制與實(shí)時(shí)數(shù)據(jù)采集

EtherCAT運(yùn)動(dòng)控制器在ROS上的應(yīng)用開發(fā)案例(下)

EtherCAT運(yùn)動(dòng)控制器在ROS上的應(yīng)用(下)

EtherCAT運(yùn)動(dòng)控制器在ROS上的應(yīng)用(上)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論