") UWB定位方式有哪些,其工作原理是什么
UWB定位方式有哪些,其工作原理是什么
目前,在工業(yè)互聯(lián)網(wǎng)4.0數(shù)字化轉(zhuǎn)型中,很多工業(yè)企業(yè)開始注重智能化管理體系,運用高精度數(shù)據(jù)分析已成為業(yè)務戰(zhàn)略的重要驅(qū)動力。四相科技UWB三維定位可視化平臺作為全新的人員定位管理平臺,充分利用移動互聯(lián)網(wǎng)、物聯(lián)網(wǎng)、云計算、大數(shù)據(jù)等新一代信息技術,改變傳統(tǒng)企業(yè)人員安全管理模式,提供高精度人員定位安全管理信息化解決方案。
在我們觀察中發(fā)現(xiàn),在UWB定位的專利中,2014-2017年相關專利數(shù)量開始增加,并在2018-2020年達到頂峰,而這之后各種融合定位方式通過低成本高精度的方式獲得市場的認可,可以說UWB定位產(chǎn)業(yè)現(xiàn)在非常火爆。
UWB定位方式
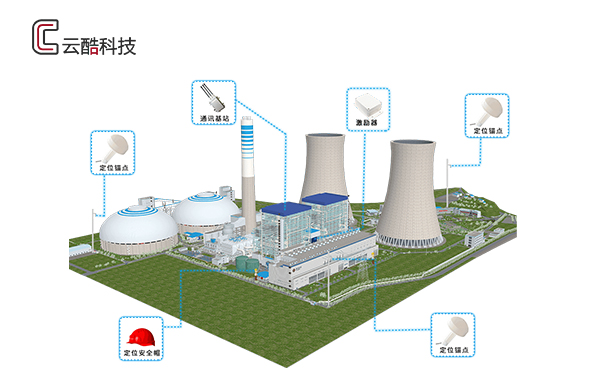
UWB對于UWB定位而言,分為0維、1維、2維以及3維定位。室內(nèi)二維空間定位需要 3 個及以上基站,室內(nèi)三維空間定位需要 4 個及以上基站,定位基站需要布置在50-100m 內(nèi),保證任何區(qū)域都能有四個定位基站接收到定位標簽發(fā)射的信號(基站也不能在同一個平面內(nèi))。
UWB三維定位常見的定位方法
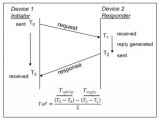
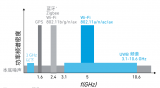
常見的定位方法有TOF、AOA、RSSI、TOA、TDOA下面是幾種方法的對比,對于UWB定位,TOA和TDOA是最常見的方法。
TOF算法用于UWB定位給系統(tǒng)測距時,嵌入式軟件實現(xiàn)難度大,對定位標簽較少情況能夠簡單實現(xiàn)定位,當標簽數(shù)量增加,對硬件設備的要求很高,定位精度較低。
同時,TOF測距方必須滿足兩點:發(fā)射信號模塊和接收信號模塊時鐘必須始終同步;接收模塊記錄信號傳輸?shù)臅r間。要實現(xiàn)待測目標的定位,至少需要得到待測目標到3個不同的固定點的距離。
AOA定位原理簡單,即信號到達角度測距,通過信號與基站的相對角度得出定位給標簽和基站之間的相對方位或相對角度,AOA定位的優(yōu)點就是直接測量信號的到達的方向角度進行估計,特別是在三維室內(nèi)空間定位中,AOA定位給就很合適。
角度測量過程容易受復雜環(huán)境影響.例如:噪聲、非視距傳播造成的誤差等,因此到達角度估計值存在誤差,只能定出定位標簽的大致位置,同時對于天線要求太高,增加了基站的制作成本,AOA只適合結(jié)合其他測距方法進行定位,例如,UWB+AOA定位方式就可以解決復雜場景的不同精度需求,實現(xiàn)整體成本降低的效果。
RSSI即接收信號強度法,基站測量定位標簽發(fā)射信號的能量強度,能量強度的大小于標簽距離的遠近成正比。但是,RSSI算法容易受到多徑效應及非視距環(huán)境等因素的影響,同時沒有發(fā)揮UWB超寬帶的特點,所以給予信號強度法不適合用于UWB室內(nèi)三維定位。
TOD和TDOA是目前使用最多的定位算法,適合UWB信道。
使用TOA測距,即信號到達時間定位,定位標簽與基站時鐘必須完全同步,在實現(xiàn)過程中存在很大的困難。而它們的技術難點就在于,設備進行時間同步來滿足所有的參考時間為同一個時間點
使用TDOA測距,即信號到達時間差測距,只要求基站時鐘必須完全同步,降低了硬件設備的制作成本,適合用于UWB室內(nèi)三維定位。
TDOA算法消除了TOA算法的弊端,只需要保證定位基站間的時鐘精確同步,可以使基站的制作成本降低,TDOA算法使用單程測距就能獲得距離信息,***了硬件設備的成本,是目前使用最多的測距算法。
UWB三維定位解決方案
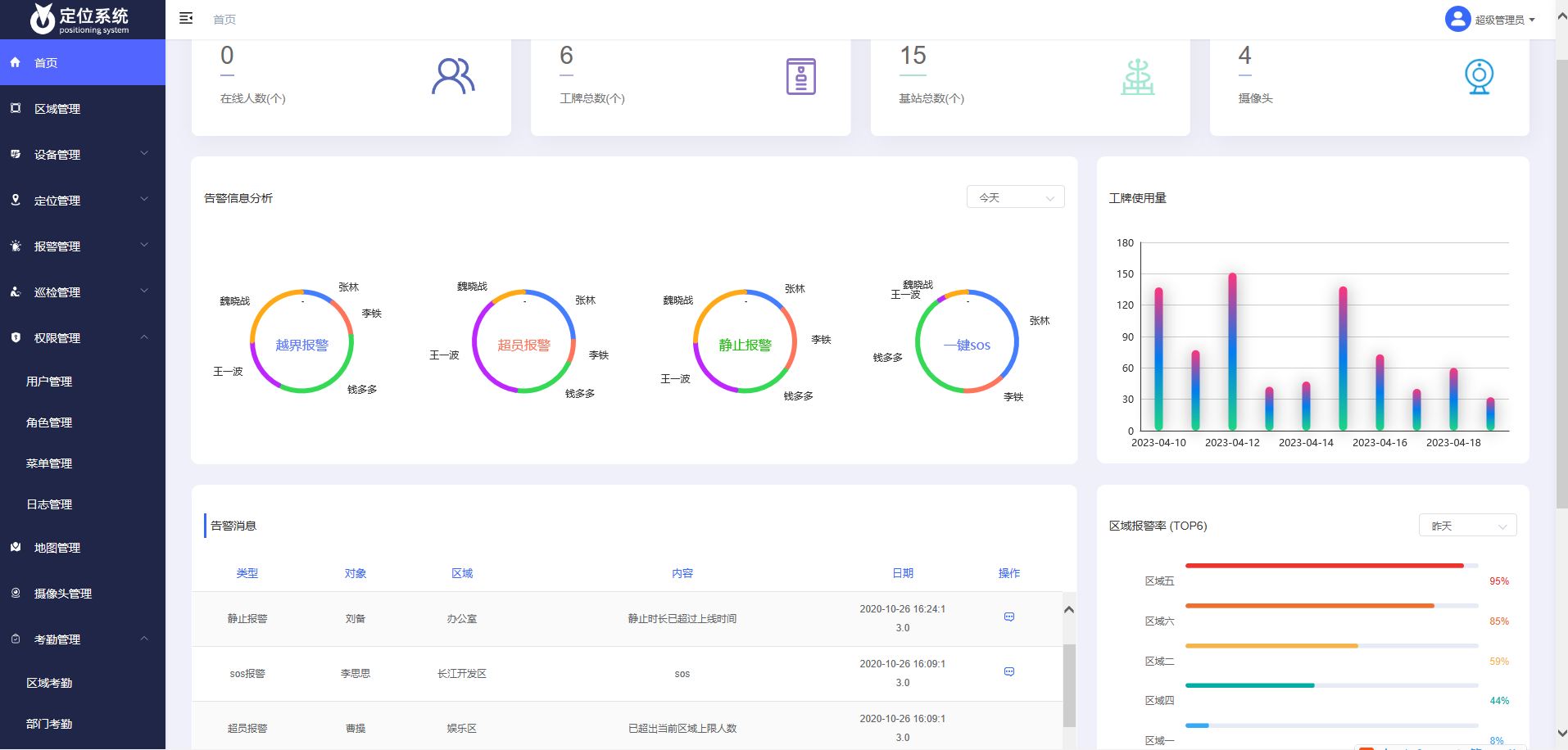
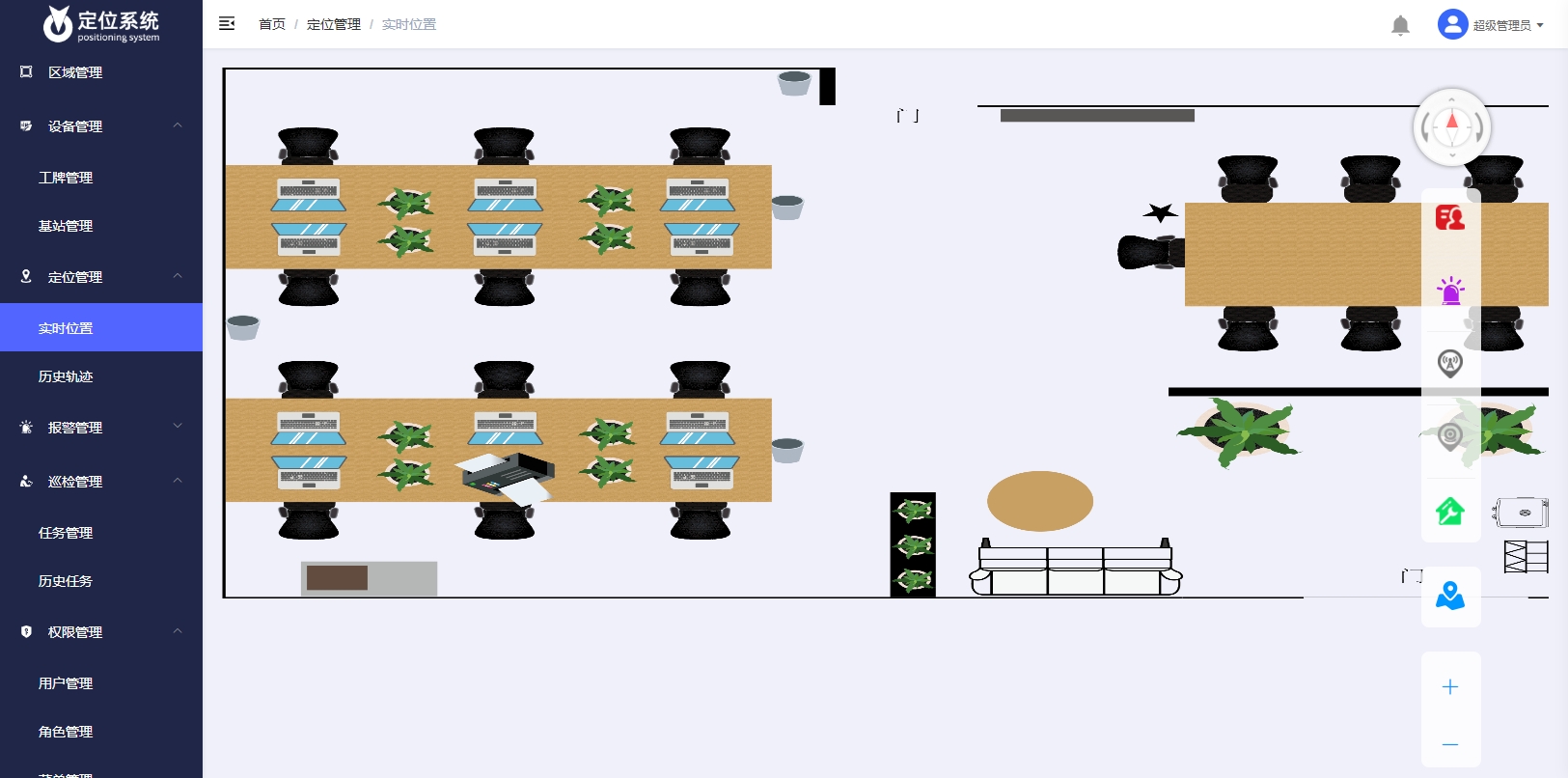
四相科技采用最新的三維虛擬仿真技術,將場景中所有的設施繪制成對應的三維圖形,并與實際場景坐標系對應,人員位置結(jié)合實時定位,將把進站所有人員虛擬實景地全部展現(xiàn)出來。
三維虛擬仿真技術可以將現(xiàn)場實景和狀態(tài)可視化展示出來,且延遲時間低,真實地展現(xiàn)人員所在位置,確保人員安全。三維仿真技術亦可對接現(xiàn)場設備運行狀態(tài),將設備的運行狀態(tài)可視化展示。
?審核編輯:湯梓紅
-
UWB
+關注
關注
32文章
1100瀏覽量
61148 -
可視化
+關注
關注
1文章
1194瀏覽量
20934 -
三維定位
+關注
關注
1文章
8瀏覽量
8361
發(fā)布評論請先 登錄
相關推薦
UWB脈沖多普勒雷達的工作原理和應用
藍牙人員定位、UWB人員定位、RFID定位技術應該怎么選

UWB標簽與其他定位技術的比較
UWB模塊工作原理 UWB模塊應用案例
煤礦人員定位系統(tǒng)——基于UWB技術帶電子圍欄功能
UWB人員定位系統(tǒng)的定位原理
基于java+單體服務 +?硬件(UWB定位基站、卡牌)技術架構開發(fā)的UWB室內(nèi)定位系統(tǒng)源碼

北斗高精度定位終端的工作原理和精度范圍

隧道UWB高精度定位系統(tǒng)

全跡科技UWB雷達及其汽車應用

UWB技術的內(nèi)部工作原理和窄帶定位方法之間的差異概述
隧道人員定位系統(tǒng)UWB定位厘米級精度助力隧道安全






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論