


在工業(yè)應(yīng)用中傳輸信息可能具有挑戰(zhàn)性。在這個項目中,讓我們看看我們?nèi)绾问褂?a target="_blank">FPGA和RS485做到這一點。
項目背景:
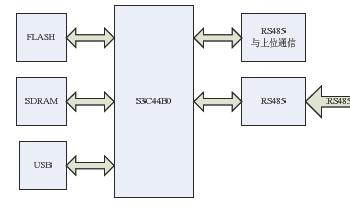
許多FPGA部署在工業(yè)環(huán)境中,用于控制流程、驅(qū)動器、執(zhí)行器和傳感器。
用于與這些傳感器、執(zhí)行器和驅(qū)動器接口的協(xié)議非常多樣化,盡管時間敏感網(wǎng)絡(luò)正在改變這一點。雖然有許多不同的協(xié)議,例如Modbus、Profibus和EtherCat。其中許多協(xié)議都基于常見的物理層,例如EIA/RS485、EIA/RS422和以太網(wǎng)。
許多接口的關(guān)鍵要求之一是能夠在嘈雜的工業(yè)環(huán)境中以物理層中的低鏈路誤碼率運行。EIA/RS485和EIA/RS422都是差分物理層,它們提供強大的多點接口,能夠進行雙向(EIA/RS485)或單向(EIA/RS422)通信。
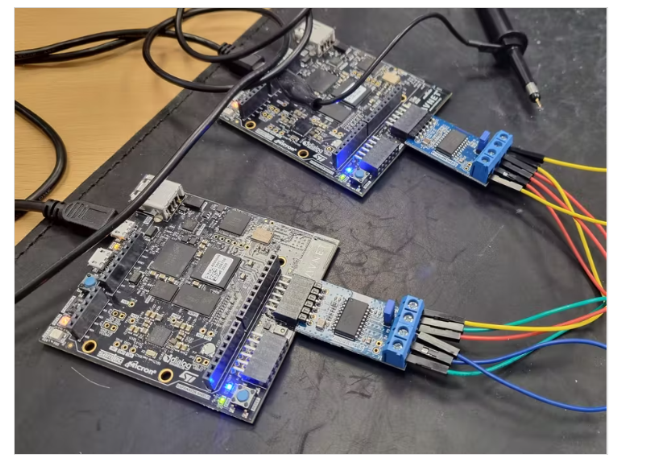
有許多應(yīng)用層協(xié)議可以使用這些物理層來實現(xiàn)。在這個項目中,我們將研究使用RS485Pmod和定制的應(yīng)用層協(xié)議將兩個MiniZed連接在一起。
硬件部件
安富利MiniZed×1
DigilentPmodRS485×2
軟件應(yīng)用程序和在線服務(wù)
AMD-XilinxVitis統(tǒng)一軟件平臺
應(yīng)用層
實現(xiàn)的自定義通信協(xié)議將使主MiniZed能夠從從MiniZed內(nèi)的16位地址空間讀取或?qū)懭?2位字。對于這個項目,我們將從從站中的BRAM讀取和寫入。然而,這個BRAM可能被從MiniZed上收集數(shù)據(jù)的傳感器填充。
數(shù)據(jù)將使用UART通過RS485鏈路發(fā)送,數(shù)據(jù)包包含多個UART傳輸
寫入的格式是
《STX》《ADDRMSB》《ADDRLSB》《DataMSB》《Data》《Data》《DataLSB》
從機將以單字節(jié)ACK或NACK響應(yīng)寫入
讀取的格式是
《ENQ》《ADDRMSB》《ADDRLSB》
MiniZed從站的讀取響應(yīng)將是
《SOH》《ADDRMSB》《ADDRLSB》《DataMSB》《Data》《Data》《DataLSB》
SOH、STX、ENQ、ACK和NACK在ASCII表中定義
當(dāng)然,這個協(xié)議可以在像ZYNQ這樣的處理器中使用UART來實現(xiàn),以使協(xié)議具有可擴展性。我為UART、ProtocolMaster和ProtocolSlave創(chuàng)建了自定義RTL模塊。
由于RS485在同一雙絞線上是定向的,因此協(xié)議必須僅在準(zhǔn)備好發(fā)送時啟用RS485發(fā)送器,以減少多個發(fā)送器嘗試同時發(fā)送時總線上的爭用可能性。
MiniZedMaster
MiniZedMaster設(shè)計將使用PS內(nèi)核通過RS485接口發(fā)送和接收數(shù)據(jù)。這將使鏈路能夠被測試,因為數(shù)據(jù)應(yīng)該能夠通過鏈路寫入,然后以不同的順序從MiniZed從站中的塊RAM中讀回。
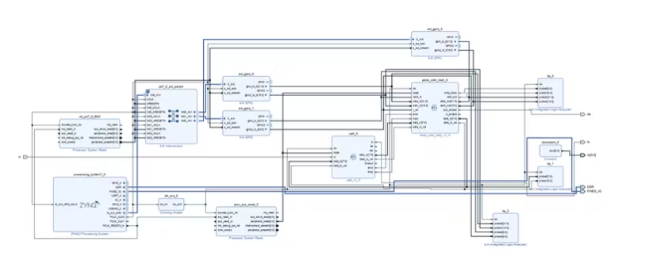
該設(shè)計使用連接到協(xié)議主模塊的AXIGPIO模塊來驅(qū)動協(xié)議主模塊的接口要求。這包括地址、數(shù)據(jù)和讀或?qū)懖僮鳌=Y(jié)果提供了從中讀取的地址和讀取的數(shù)據(jù)。
為了能夠調(diào)試應(yīng)用程序,我還包括了幾個ILA,幫助理解系統(tǒng)行為。
在MinizedMaster上運行的軟件應(yīng)用程序是
#include
#include "platform.h"
#include "xil_printf.h"
#include "xgpio.h"
#define DATA_ADDR XPAR_GPIO_0_DEVICE_ID
#define VALID_RW XPAR_GPIO_1_DEVICE_ID
#define DATA_BCK XPAR_GPIO_2_DEVICE_ID
#define DATA_VALID_CH 1
#define ADDR_RW_CH 2
XGpio Gpio1;
XGpio Gpio2;
XGpio Gpio3;
int count = 0;
int main()
{
init_platform();
XGpio_Initialize(&Gpio1, DATA_ADDR);
XGpio_Initialize(&Gpio2, VALID_RW);
XGpio_Initialize(&Gpio3, VALID_RW);
while(1){
u32 rd_data, rd_addr;
//write
XGpio_DiscreteWrite(&Gpio1, DATA_VALID_CH, count );
XGpio_DiscreteWrite(&Gpio1, ADDR_RW_CH, 0x5001);
XGpio_DiscreteWrite(&Gpio2, ADDR_RW_CH, 0x0);
XGpio_DiscreteWrite(&Gpio2, DATA_VALID_CH, 0x1);
XGpio_DiscreteWrite(&Gpio2, DATA_VALID_CH, 0x0);
usleep(1000);
//read
XGpio_DiscreteWrite(&Gpio1, ADDR_RW_CH, 0x5001);
XGpio_DiscreteWrite(&Gpio2, ADDR_RW_CH, 0x1);
XGpio_DiscreteWrite(&Gpio2, DATA_VALID_CH, 0x1);
XGpio_DiscreteWrite(&Gpio2, DATA_VALID_CH, 0x0);
usleep(10000);
rd_data = XGpio_GetDataDirection(&Gpio3, 1);
rd_data = XGpio_DiscreteRead(&Gpio3, 1);
rd_addr = XGpio_DiscreteRead(&Gpio3, 2);
if(rd_data != count){
printf("read back not correct %d, %d \n\r", rd_data, count);
}
usleep(1000000);
count++;
}
cleanup_platform();
return 0;
}
MiniZedSlave
MiniZedSlave使用PS模塊為邏輯設(shè)計提供時鐘。協(xié)議從站連接一個BRAM,該BRAM存儲通過通信鏈路提供的數(shù)據(jù)。
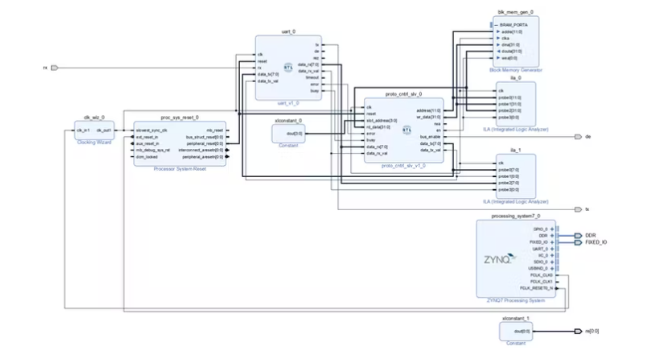
MiniZedSlave的這個實現(xiàn)不需要軟件,只需要ProtocolSlave、UART和BRAM。與MiniZedMaster一樣,PS為模塊提供時鐘。
普通XDC
MiniZedMaster和Slave都使用MiniZed上的Pmod1連接到RS485Pmod。因此,兩者的XDC文件是相同的。
set_property IOSTANDARD LVCMOS33 [get_ports {re[0]}]
set_property IOSTANDARD LVCMOS33 [get_ports de]
set_property IOSTANDARD LVCMOS33 [get_ports rx]
set_property IOSTANDARD LVCMOS33 [get_ports tx]
set_property PACKAGE_PIN L15 [get_ports {re[0]}]
set_property PACKAGE_PIN M14 [get_ports de]
set_property PACKAGE_PIN L14 [get_ports rx]
set_property PACKAGE_PIN M15 [get_ports tx]
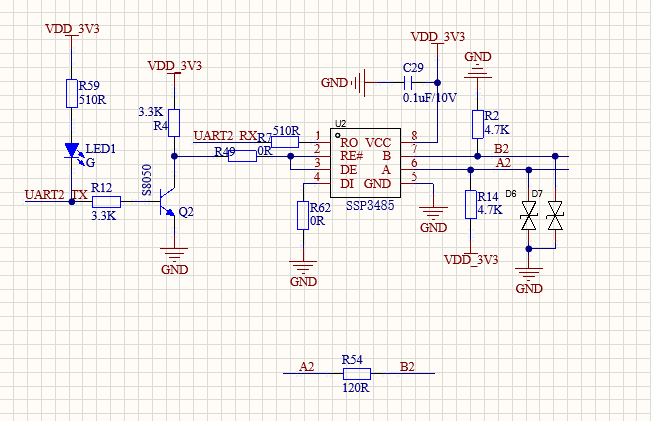
為RS485總線接線
RS484總線非常簡單,但我們確實需要正確連接Pmod,如DigilentPmodRS485參考指南中所示。
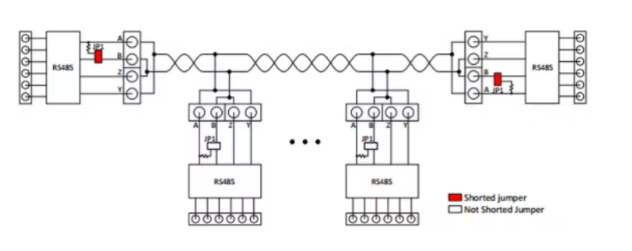
RS485端子的兩端需要用一個電阻端接,在PmodRS485上可以使用跳線安裝或不安裝。對于此應(yīng)用,需要安裝兩個電阻器。
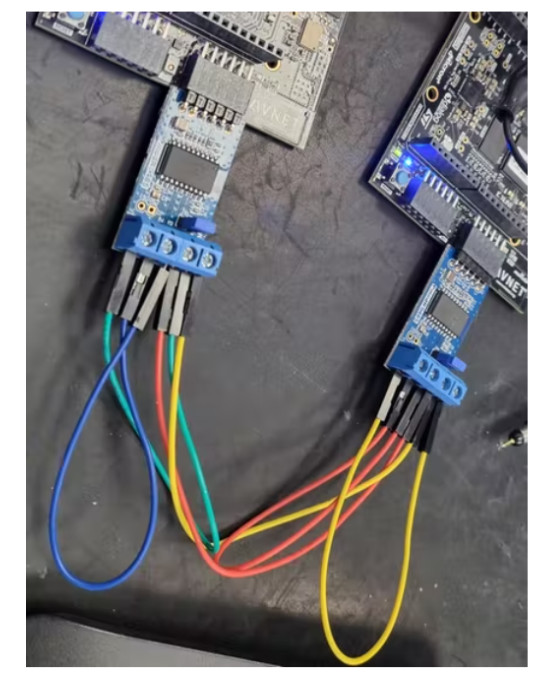
接線時,請小心為Pmod上的接收器連接回路。
硬件測試
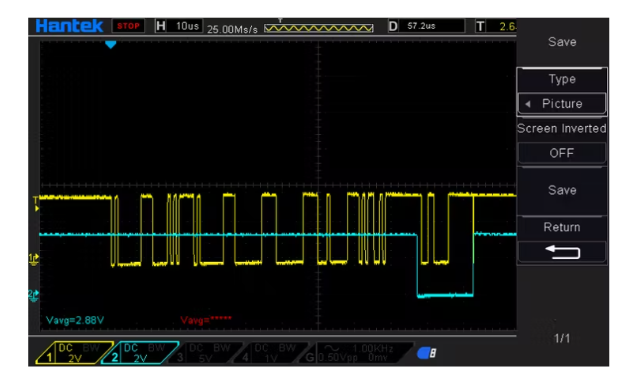
使用在MiniZed主機上運行的軟件應(yīng)用程序,我們可以讀取和寫入MiniZed從機中的BRAM內(nèi)存。然而,要了解它是如何工作的,我們最好通過查看總線上的波形來學(xué)習(xí)
邏輯TX引腳上來自主機的寫入傳輸如下所示
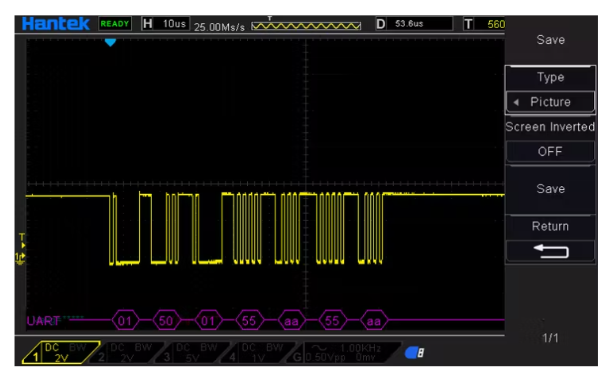
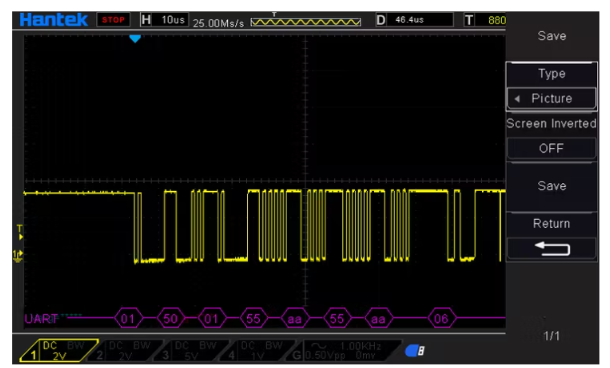
相應(yīng)的總線端如下所示-請注意末尾的0x06是確認(rèn)。

主機上的邏輯RX信號上的RX引腳顯示寫入和寫入確認(rèn)。MiniZedMaster和Slave的設(shè)計都永久啟用了RX
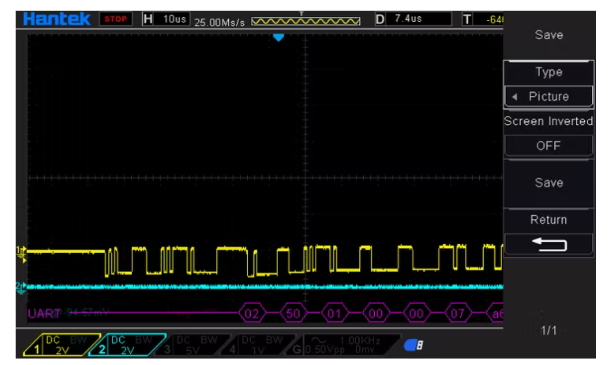
從MiniZedSlave讀取的數(shù)據(jù)如下所示,其中數(shù)據(jù)表示由MiniZedMaster寫入的遞增計數(shù)。

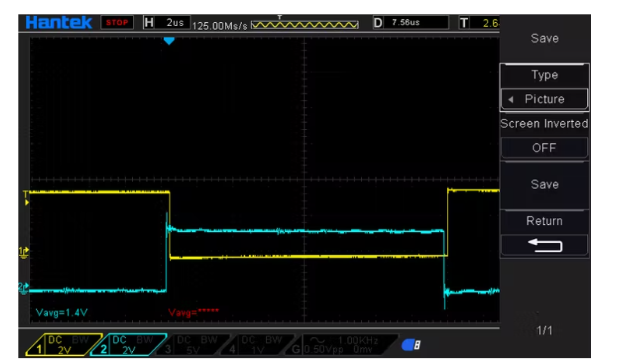
在下面的波形中,可以在讀取響應(yīng)之前在總線側(cè)觀察到讀取請求。
TX啟用相對于TX數(shù)據(jù)的時序如下所示,請注意我們?nèi)绾卧陬A(yù)期回復(fù)時禁用TX路徑。
探測MiniZedMaster和Slave上的不同TX使能顯示了
結(jié)論
FPGA為許多工業(yè)應(yīng)用提供了很好的解決方案,該項目展示了使用常用工業(yè)接口連接不同板和傳輸數(shù)據(jù)是多么容易。在這個應(yīng)用程序中,數(shù)據(jù)速率為1Mb/s,可以實現(xiàn)高達16Mb/s或更快的線速率!
-
FPGA
+關(guān)注
關(guān)注
1646文章
22059瀏覽量
619150 -
RS485
+關(guān)注
關(guān)注
39文章
1238瀏覽量
84165 -
工業(yè)通信
+關(guān)注
關(guān)注
0文章
157瀏覽量
15846
發(fā)布評論請先 登錄
RS485原理解析和應(yīng)用
如何實現(xiàn)RS485無線通信
基于FPGA的RS485通信接口設(shè)計
RS485通信與Modbus協(xié)議的相關(guān)資料分享
RS485是什么?RS485通信的特點有哪些
提高RS485總線通信速度的設(shè)計
RS485通信協(xié)議
PLC的RS485通信口設(shè)計
rs485轉(zhuǎn)tcp網(wǎng)關(guān)盒子怎么用(rs485協(xié)議轉(zhuǎn)以太網(wǎng)tcp/ip)

RS485工業(yè)通信網(wǎng)關(guān)的原理是什么?
工業(yè)RS485通信的收發(fā)機制介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論