 一文讀懂ADAS八大功能
一文讀懂ADAS八大功能
為了加速SiTime MEMS硅晶振產品的應用普及,讓中國電子工程師能快速體驗MEMS硅晶振的高穩定性、高可靠性、超小封裝、超低功耗、超低抖動等更多優勢,SiTime公司聯合本土半導體分銷商北京晶圓電子有限公司共同建立SiTime樣品中心,為用戶提供免費樣品申請,小批量試產、現貨應急、特價申請、技術支持等便捷服務,更多信息請訪問www.sitimechina.com,客戶服務熱線400-888-2483。
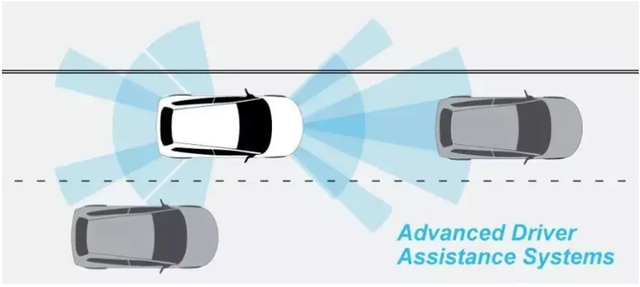
我們都知道無人駕駛是汽車發展的未來。但是完全無人駕駛究竟何時才能實現,業界一直眾說紛紜。然而在現實完全無人駕駛的道路上,高級駕駛輔助系統(ADAS)就成為了在現今技術及政策法規條件下的一個不錯的選擇。同時,很多ADAS功能已經大規模量產,不僅給汽車制造商提供更多差異化的產品設計選擇,也為普通的消費者提供了更好的駕駛體驗和安全保障。本文主要給大家重點介紹一下ADAS的八大功能系統。
一、車道偏離預警系統
LDWS車道偏離預警系統LDWS( Lane departure warning system)是指行車中未打轉向燈突然大幅度偏離車道,不正常偏移時,行車記錄儀一旦判定行駛路線有異,便會以行車記錄儀的顯示屏幕提醒駕駛人,并發出聲響警告對司機進行警示。這將使司機可以馬上采取行動,回到原行車道上。
車道偏離預警系統主要由HUD抬頭顯示器、攝像頭、控制器以及傳感器組成。當車道偏離預警系統開啟時,攝像頭(一般安置在車身側面或后視鏡位置)會時刻采集行駛車道的標識線,通過圖像處理獲得汽車在當前車道中的位置參數。
當檢測到汽車偏離車道時,傳感器會及時收集車輛數據和駕駛員的操作狀態,之后由控制器發出警報信號,整個過程大約在0.5秒完成,為駕駛者提供更多的反應時間。而如果駕駛者打開轉向燈,正常進行變線行駛,那么車道偏離預警系統不會做出任何提示。

二、車道保持系統
車道保持輔助系統LKS (Lane Keeping System)屬于智能駕駛輔助系統中的一種。它可以在車道偏離預警系統(LDWS)的基礎上對剎車的控制協調裝置進行控制。對車輛行駛時借助一個攝像頭識別行駛車道的標識線將車輛保持在車道上提供支持。可檢測本車在車道內的位置,并可自動調整轉向,使本車保持在車道內行駛。
如果車輛接近識別到的標記線并可能脫離行駛車道,那么會通過方向盤的振動,或者是聲音來提請駕駛員注意,并輕微轉動方向盤修正行駛方向,使車輛處于正確的車道上,若方向盤長時間檢測到無人主動干預,則發出報警,用來提醒駕駛人員。
如果車道保持輔助系統識別到本車道兩側的標記線,那么系統處于待命狀態。這通過組合儀表盤中的綠色指示燈顯示。當系統處于待命狀態下,如果在Y過標記線前打了轉向燈,警告信號就會被屏蔽,認定駕駛員為有意識地換道。該系統主要應用于結構化的道路上,如高速公路和路面條件較好(車道線清晰)的公路上行駛。當車速達到65km/h或以上才開始運行。
三、自適應巡航系統ACC
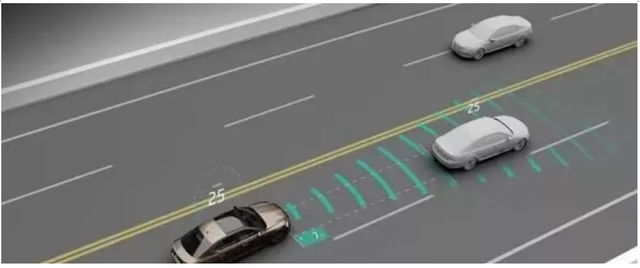
自適應巡航系統ACC(Adaptive Cruise Control)是一項舒適性的輔助駕駛功能。如果車輛前方暢通,自適應巡航(ACC)將保持設定的最大巡航速度向前行駛。如果檢測到前方有車輛,自適應巡航(ACC) 將根據需要降低車速,與前車保持基于選定時間的距離,直到達到合適的巡航速度。自適應巡航也可稱為主動巡航,類似于傳統的定速巡航控制,該系統包括雷達傳感器、數字信號處理器和控制模塊。
在自適應巡航系統中,系統利用低功率雷達或紅外線光束得到前車的確切位置,如果發現前車減速或監測到新目標,系統就會發送執行信號給發動機或制動系統來降低車速,從而使車輛和前車保持一個安全的行駛距離。
當前方道路障礙清除后又會加速恢復到設定的車速,雷達系統會自動監測下一個目標。主動巡航控制系統代替司機控制車速,避免了頻繁取消和設定巡航控制。當與前車之間的距離過小時,ACC控制單元可以通過與制動防抱死系統、發動機控制系統協調動作,使車輪適當制動,并使發動機的輸出功率下降,以使車輛與前方車輛始終保持安全距離。自適應巡航系統適合于多種路況,為駕駛者提供了一種更輕松的駕駛方式。
四、前碰撞預防系統FCW
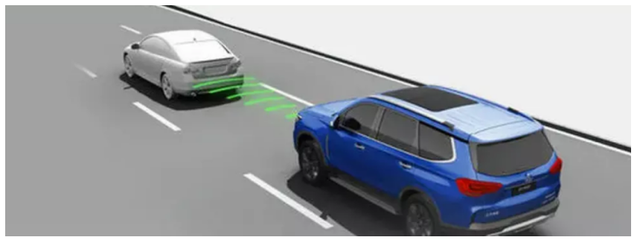
前碰撞預防系統FCW (Forward Collision Warning)是通過雷達系統來時刻監測前方車輛,判斷本車與前車之間的距離、方位及相對速度,當存在潛在碰撞危險時對駕駛者進行警告。FCW系統本身不會采取任何制動措施去避免碰撞或控制車輛。
通過分析傳感器獲取的前方道路信息對前方車輛進行識別和跟蹤,如果有車輛被識別出來,則對前方車距進行測量。同時利用車速估計,根據安全車距預警模型判斷追尾可能,一旦存在追尾危險,便根據預警規則及時給予駕駛人主動預警。
五、自動泊車系統APA
自動泊車系統APA(Automatic Parking Assist)是利用車載傳感器(一般為超聲波雷達或攝像頭)識別有效的泊車空間,并通過控制單元控制車輛進行泊車。相比于傳統的倒車輔助功能,如倒車影像以及倒車雷達,自動泊車的功能智能化程度更高,有效的減輕了駕駛員的倒車困難。
全自動泊車輔助系統APA,通過控制車輛的加減速度和轉向角度自動停放車輛。該系統通過AVM(環視)和USS(超聲波雷達)感知泊車環境,使用IMU和車輪傳感器估計車輛姿態(位置和行駛方向),并根據駕駛員的選擇自動或手動設置目標泊車位。然后系統進行自動泊車軌跡計算,并通過精確的車輛定位與車輛控制系統使車輛沿定義的泊車軌跡進行全自動泊車,直至到達最終目標泊車位。

六、盲點監測系統BSD
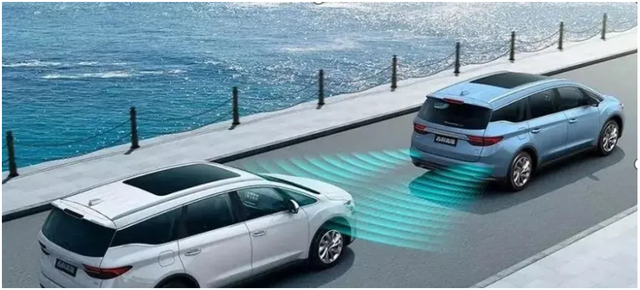
由于汽車后視鏡存在視覺盲區,變道之前就看不到盲區的車輛,如果盲區內有超車車輛,此時變道就會發生碰撞事故。在大雨天氣、大霧天氣、夜間光線昏暗,更加難以看清后方車輛,此時變道就面臨更大的危險,盲點監測系統就是為了解決后視鏡的盲區而產生的。
盲點監測系統BSD( Blind Spot Detection),是汽車上的一款安全類的高科技配置,主要功能是掃除后視鏡盲區,依賴于車輛尾部兩個雷達時刻監測車輛的側后面和側面狀態,如果車輛位于該區域內,駕駛員將通過后視鏡上盲點警告指示燈和組合儀表獲得相關警告提示,避免在車道變換過程中由于后視鏡盲區而發生事故。
七、駕駛員疲勞預警系統DFM
駕駛員疲勞預警系統DFM(Driver Fatigue Monitor System)主要是通過攝像頭獲取的圖像,通過視覺跟蹤、目標檢測、動作識別等技術對駕駛員的駕駛行為及生理狀態進行檢測,當駕駛員發生疲勞、分心、打電話、抽煙等危險情況時在系統設定時間內報警以避免事故發生。DFM系統能有效規范駕駛員的駕駛行為、大大降低交通事故發生的幾率。通過分析駕駛員的疲勞特征(如打哈欠、閉眼等),對疲勞行為及時發出疲勞駕駛預警。高精準度的算法甚至能做到不受時間段、光照情況、是否戴墨鏡等外界條件影響,始終對駕駛員的疲勞狀態進行有效管理。當駕駛人員產生生理疲勞狀態時,立即發出預警警告,及時喚醒駕駛員,避免嚴重事故發生。

八、自適應燈光控制ALC
自適應燈光控制ALC(Adaptive Light Control)是一種智能燈光調節系統。通過感知駕駛員操作、車輛行駛狀態、路面變化以及天氣環境等信息,AFS自動控制前照燈實時進行上下、左右照明角度的調整,為駕駛員提供最佳道路照明效果。

自適應前照燈系統共由四部分組成:傳感器、ECU、車燈控制系統和前照燈。汽車車速傳感器和方向盤轉角傳感器不斷地把檢測到的信號傳遞給ECU,ECU根據傳感器檢測到的信號進行處理,把處理完后的數據進行判斷,輸出前照燈轉角指令,使前照燈轉過相應的角度。汽車在轉彎時,重點是要提前看到所轉方向的障礙物,根據現實駕駛的經驗,車燈一般只需轉過0~15°即可,只需要所轉方向側的那只前照燈實現智能轉向就可,另一側前照燈還是保持原來的方向。雖簡化了控制,仍然能夠達到預期的效果。它可以通過控制系統能夠顯著改善各種路況下的照明效果,提高行車安全。
-
adas
+關注
關注
309文章
2183瀏覽量
208632
發布評論請先 登錄
相關推薦
2025年全球半導體八大趨勢,萬年芯蓄勢待發

一文解析ADAS的基礎知識




米思米直線電機模組的八大核心優勢,你知道嗎?





 工商網監
工商網監
評論