") 事件相機(jī)的原理與處理范式
事件相機(jī)的原理與處理范式
佐思周彥武老師的事件相機(jī),引發(fā)了對(duì)幀事件的思考。基于該思考,對(duì)事件相機(jī)做一個(gè)整理,具體算法不去解釋。主要參考《Event-based Vision: A Survey》
事件相機(jī)最初是神經(jīng)形態(tài)學(xué)工程的一個(gè)產(chǎn)物,主要是利用VLSI(Very Large Scale Integration)去模擬、實(shí)現(xiàn)人與其他動(dòng)物大腦中的某些神經(jīng)元構(gòu)造,如人眼只關(guān)注相對(duì)運(yùn)動(dòng)的物體,而不去關(guān)心相對(duì)靜止的物體,這里的相對(duì)運(yùn)動(dòng)使用脈沖編碼方式來(lái)實(shí)現(xiàn)(即事件相機(jī))。
事件相機(jī)與傳統(tǒng)相機(jī)存在很大的差別,相比于傳統(tǒng)相機(jī)以固定頻率采集圖像,事件相機(jī)大多是通過(guò)測(cè)量每個(gè)像素的亮度變化來(lái)輸出異步信號(hào)(包括事件、位置和亮度變化的符號(hào))。事件相機(jī)與傳統(tǒng)相機(jī)相比有很多的優(yōu)點(diǎn):
沒(méi)有幀率的概念,它不同于等時(shí)間間距采樣的方式,其通過(guò)等亮度變化值采樣的方式,可以捕捉更快的動(dòng)作,對(duì)快速變化的亮度十分敏感,所以不受運(yùn)動(dòng)模糊的影響;
單個(gè)像素的電路設(shè)計(jì)比較復(fù)雜,無(wú)法獲得單個(gè)像素的亮度值,并且其采用對(duì)數(shù)響應(yīng)的方式,所以可以獲得較高的動(dòng)態(tài)測(cè)量范圍和高時(shí)間分辨率;
減少數(shù)據(jù)冗余,極大減小了數(shù)據(jù)的傳輸帶寬;
由于其眾多的優(yōu)點(diǎn),事件相機(jī)被應(yīng)用在物體跟蹤、識(shí)別、手勢(shì)控制、三維重建、光溜估計(jì)、SLAM等領(lǐng)域。
一)事件相機(jī)的原理
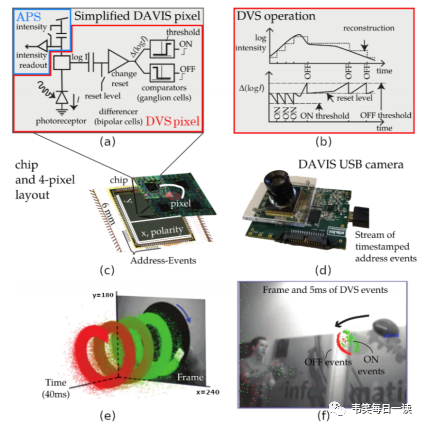
如上圖,每個(gè)像素都有一個(gè)計(jì)算電路,左邊的光電轉(zhuǎn)換電路將光強(qiáng)轉(zhuǎn)換為電壓值,使用一個(gè)差分電路,計(jì)算像素亮度的變化(該變化說(shuō)明,事件相機(jī)取決于亮度的變化,與亮度的絕對(duì)值無(wú)關(guān)),當(dāng)亮度變化累積達(dá)到一定閾值(該閾值一般為相機(jī)的固有參數(shù))后,就會(huì)觸發(fā)信號(hào)。該相機(jī)采用特殊的編碼方式,即Address Event Representation,進(jìn)行二值圖像的壓縮,一般圖像的編解碼都會(huì)被供應(yīng)商集成到硬件SDK中。
二)關(guān)于事件的理解
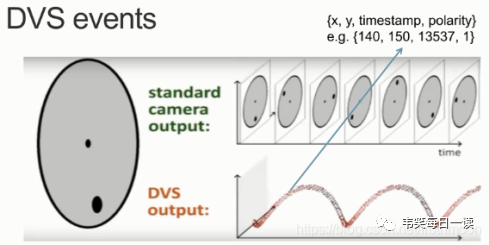
事件相機(jī),重點(diǎn)在于事件的理解。所謂的事件有三個(gè)要素:1)時(shí)間戳、2)像素坐標(biāo)、3)極性;即一個(gè)事件可以表達(dá)為“在什么時(shí)間,哪個(gè)像素點(diǎn),發(fā)生了亮度的增加或者減小”。
當(dāng)場(chǎng)景中由物體運(yùn)動(dòng)或光照改變?cè)斐纱罅肯袼刈兓瘯r(shí),就會(huì)產(chǎn)生一系列的事件,這些事件以事件流(Events stream)方式輸出,事件流的數(shù)據(jù)量遠(yuǎn)遠(yuǎn)小于傳統(tǒng)相機(jī)的數(shù)據(jù),且沒(méi)有最小實(shí)踐單位。所以具有低延遲的特性。以下裝置來(lái)說(shuō)明事件相機(jī):

上圖可以抽象為如下,圖中的polarity可以是1,也可以是-1,用來(lái)表示該像素是變亮還是變暗,將事件分為on和offer。下圖右側(cè)上方,是傳統(tǒng)相機(jī)的輸出,下方為事件相機(jī)的輸出。當(dāng)圓盤轉(zhuǎn)動(dòng)時(shí),傳統(tǒng)相機(jī)會(huì)定時(shí)拍攝完整的圖像,下方事件相機(jī)僅會(huì)輸出變化,即黑斑的運(yùn)動(dòng)。當(dāng)圓盤不動(dòng)時(shí),傳統(tǒng)相機(jī)依然會(huì)傻傻的拍攝圖像,而事件相機(jī)則不會(huì)產(chǎn)生任何輸出(傳統(tǒng)相機(jī)很癡情,事件相機(jī)很渣)。
當(dāng)轉(zhuǎn)速很快時(shí):
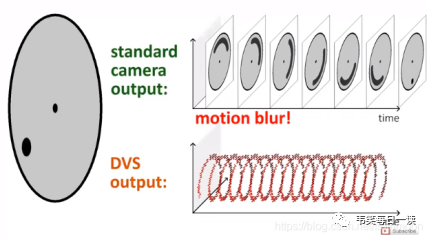
事件相機(jī)一個(gè)特點(diǎn)就是快,兩個(gè)events之間平均時(shí)間差約為0.1us左右;雖然在事件相機(jī)中,輸出的event只有高低電平之分,無(wú)法分辨intensity,但不同強(qiáng)度的變化所激發(fā)的event數(shù)量是不同的。如果有條件進(jìn)行實(shí)驗(yàn)的話(推薦CeleX5,非廣告,便宜有方便),當(dāng)相機(jī)運(yùn)動(dòng)時(shí),視野內(nèi)會(huì)出現(xiàn)一條明暗邊界,由于邊界兩邊存在明暗對(duì)比,邊界會(huì)激發(fā)一條同形狀的event點(diǎn)群;同樣的形狀下,明暗對(duì)比越大的邊界,在相同情況下激發(fā)的event數(shù)量越多,這樣就可以得到較為粗糙的強(qiáng)度信息。如上圖中低速運(yùn)動(dòng)和高速運(yùn)動(dòng)所激發(fā)的event數(shù)量有明顯的不同。
三)事件相機(jī)的處理范式
事件相機(jī)的處理一般有兩種方法,一是模型驅(qū)動(dòng)型,從其他傳感器獲得模型,如半稠密圖,然后通過(guò)處理一個(gè)個(gè)事件來(lái)更新系統(tǒng)狀態(tài);另一個(gè)是數(shù)據(jù)驅(qū)動(dòng),利用機(jī)器學(xué)習(xí)的方法來(lái)獲取事件之間的關(guān)聯(lián)性。
由于事件相機(jī)輸出的是事件流,有三種常見(jiàn)的處理范式,分別為:
a)Event-by-Event:Event-by-Event方法會(huì)被用在很多任務(wù)中,如slam中的特征追蹤、位姿追蹤以及圖像重建等。如前面提到event經(jīng)常大量出現(xiàn)在明暗分界線明顯的地方。在vSLAM的Visual Odometry(通過(guò)求相鄰圖像的差別來(lái)計(jì)算相機(jī)的姿態(tài)變換,然后求得相機(jī)的位姿)中,基于feature based approach使用的feature一般也都是在明暗分明的地方。所以在vSLAM中,采用事件相機(jī)可以幫助過(guò)濾一些無(wú)用的信息,減少計(jì)算量。
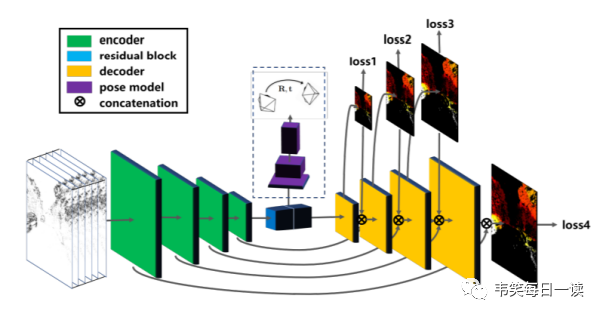
b)Groups of Events:由于每個(gè)事件攜帶的信息比較少,且容易收到噪聲的影響,所以一般截取一段時(shí)間內(nèi)的事件一起處理,這樣可以為需要解決的問(wèn)題產(chǎn)生足夠的信噪比。這樣可以將事件轉(zhuǎn)換為傳統(tǒng)相機(jī)的frame,然后運(yùn)動(dòng)傳統(tǒng)的視覺(jué)方法進(jìn)行解決。另外也可以直接利用event之間的關(guān)聯(lián)性,來(lái)進(jìn)行目標(biāo)檢測(cè)、光流估計(jì)、深度估計(jì)等。如利用事件的像素直方圖、最近時(shí)間戳表面(SAE)、插值體素網(wǎng)絡(luò)將event轉(zhuǎn)換成CNN使用的張量數(shù)據(jù),然后采用類似encoder-decoder的架構(gòu)進(jìn)行應(yīng)用(Event-based Vision: A Survey)。
c)SNN:全稱Spiking Neural Networks,是一種脈沖事件的神經(jīng)網(wǎng)絡(luò)。它將視覺(jué)空間中的一個(gè)小區(qū)域作為輸入事件,不同于CNN的每一次迭代傳播都被激活,只有當(dāng)event的狀態(tài)超過(guò)一定閾值時(shí),才會(huì)激活,產(chǎn)生輸出。關(guān)于SNN,則是另外一個(gè)全新的領(lǐng)域,這里不做介紹。
四)關(guān)于事件相機(jī)的思考
事件相機(jī)雖然有很多的特點(diǎn),但大多還停留在實(shí)驗(yàn)室階段,適合占坑:
事件相機(jī)具有很高的頻率(可以達(dá)到1000Hz以上),但無(wú)論在無(wú)人機(jī)還是自動(dòng)駕駛領(lǐng)域,都不需要太高的頻率(200Hz足以)。而目前傳統(tǒng)相機(jī)也有達(dá)到200Hz以上,如iphoneX的攝像頭頻率可達(dá)240Hz。
事件相機(jī)可以在檢測(cè)、目標(biāo)重建方向發(fā)揮更大的作用,但在視頻理解、語(yǔ)義分割領(lǐng)域還存在很大的缺陷。另外隨著深度學(xué)習(xí)的發(fā)展,利用視頻連續(xù)幀之間關(guān)系,也能夠達(dá)到類似event的特點(diǎn),如深度估計(jì)或光流估計(jì)。
事件相機(jī)適應(yīng)性較強(qiáng),在低光照或者高動(dòng)態(tài)環(huán)境下信號(hào)穩(wěn)定,可以與傳統(tǒng)的相機(jī)相結(jié)合,即將event sensor集成在普通相機(jī)中(如 Dynamic and Active-pixel Vision Sensor,集成了event sensor、普通相機(jī)、IMU等),多方優(yōu)勢(shì)互補(bǔ),既能在低光照或者高動(dòng)態(tài)下獲得穩(wěn)定的信號(hào),又能夠進(jìn)行視頻理解、語(yǔ)義分割等功能。這種相機(jī)可以用在無(wú)人機(jī)或者無(wú)人駕駛領(lǐng)域。
審核編輯 :李倩
-
頻率
+關(guān)注
關(guān)注
4文章
1506瀏覽量
59244 -
相機(jī)
+關(guān)注
關(guān)注
4文章
1353瀏覽量
53652 -
數(shù)據(jù)冗余
+關(guān)注
關(guān)注
0文章
5瀏覽量
6545
原文標(biāo)題:關(guān)于事件相機(jī)的整理與思考
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺(jué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
【網(wǎng)絡(luò)研討會(huì)】掌握FLIR IIS工業(yè)相機(jī)的色彩處理:從感知到精準(zhǔn)
東軟引領(lǐng)醫(yī)院智慧服務(wù)新范式
深視智能高速相機(jī)觀測(cè)水滴滴落過(guò)程#高速相機(jī) #高清高速相機(jī) #高速工業(yè)相機(jī) #工業(yè)相機(jī) #機(jī)器視覺(jué) #傳感器
工業(yè)相機(jī)的幀率是不是越高越好


新品上市|深視智能高速相機(jī)精靈系列引領(lǐng)行業(yè)新風(fēng)尚 集多項(xiàng)高端技術(shù)于一體!#深視智能#高速相機(jī)

什么是高光譜相機(jī)?高光譜相機(jī)有什么用?

VSP2270數(shù)碼相機(jī)的CCD信號(hào)處理器數(shù)據(jù)表

VSP2272適合數(shù)碼相機(jī)的完整混合信號(hào)處理IC數(shù)據(jù)表
VSP2560/62/66數(shù)字相機(jī)混合信號(hào)處理IC數(shù)據(jù)表
VSP2101數(shù)碼相機(jī)的CCD信號(hào)處理器數(shù)據(jù)表
基于TOF深度相機(jī)的圖像處理專利獲授權(quán)
面陣相機(jī)的工作原理 線陣相機(jī)和面陣相機(jī)的區(qū)別在哪
工業(yè)相機(jī)丟幀現(xiàn)象怎么解決?
工業(yè)相機(jī)為什么使用圖像緩沖技術(shù)?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論