


微流體操控系統(tǒng)可以感知液體并控制其流動。然而,傳統(tǒng)的傳感器和電機(jī)很難適應(yīng)空間有限的微流體裝置;此外,由于流體的快速流動,導(dǎo)致快速傳感和制動存在一定困難,因此,亟需開發(fā)一種能夠提供實時傳感和快速驅(qū)動的微型微流體操控系統(tǒng)。
據(jù)麥姆斯咨詢報道,為了實現(xiàn)上述目標(biāo),南開大學(xué)劉遵峰教授團(tuán)隊利用螺旋非線性應(yīng)力的中空纖維,開發(fā)了快速扭轉(zhuǎn)和拉伸驅(qū)動器,可以感知流體溫度并將流體分類到所需的容器中。在對流體流量的響應(yīng)方面,所設(shè)計的驅(qū)動器具有高驅(qū)動行程(87.5%)、快速響應(yīng)速度(0.88s)和高溫度靈敏度(0.5K溫度變化時旋轉(zhuǎn)20°),其工作能力和功率密度分別是空氣驅(qū)動固體纖維的1.5倍和90倍。相關(guān)工作以“Microfluidic manipulation by spiral hollow-fibre actuators”為題發(fā)表在Nature Communications上。
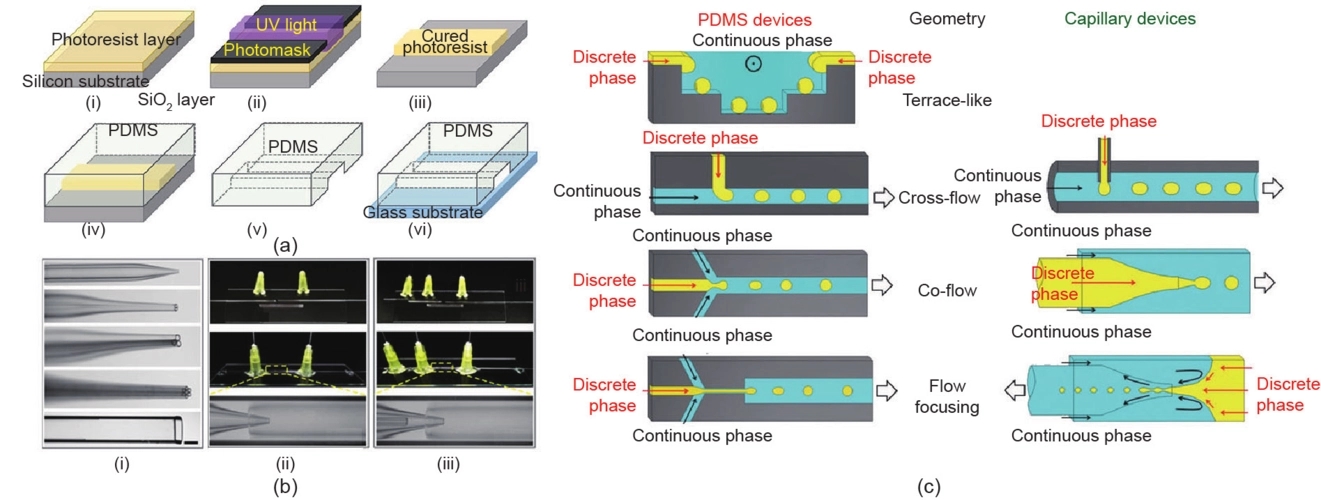
具體而言,中空纖維驅(qū)動器采用內(nèi)部(x)和外部(y)直徑不同的低密度聚乙烯中空纖維(PEHFs)制備而得,并以PEHFx-y形式命名。由于制備過程中形成的緊結(jié)分子形態(tài),PEHF具有各向異性的熱膨脹行為。此外,PEHF具有較高的強(qiáng)度和柔韌性,斷裂強(qiáng)度為39.4 MPa,斷裂應(yīng)變?yōu)?88.4%。
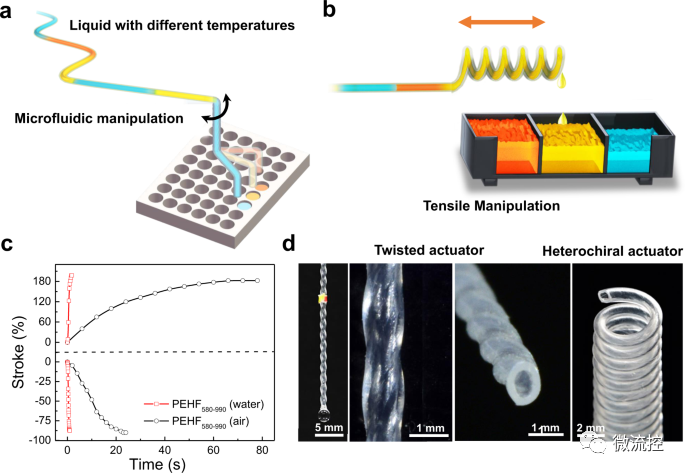
圖1 用于微流體操控的中空纖維驅(qū)動器
此外,研究發(fā)現(xiàn),流動的熱水可引起中空纖維驅(qū)動器的扭轉(zhuǎn)旋轉(zhuǎn),表明通過感應(yīng)水溫對微流體進(jìn)行扭轉(zhuǎn)操控的可能性。具體地,研究人員制備得到PEHF580-990驅(qū)動器的189°/cm旋轉(zhuǎn)角度對應(yīng)歸一化的旋轉(zhuǎn)角度為18.9°,對應(yīng)插入捻度變化為13.1%,這也可與以往研究中報道的扭轉(zhuǎn)驅(qū)動器相媲美。
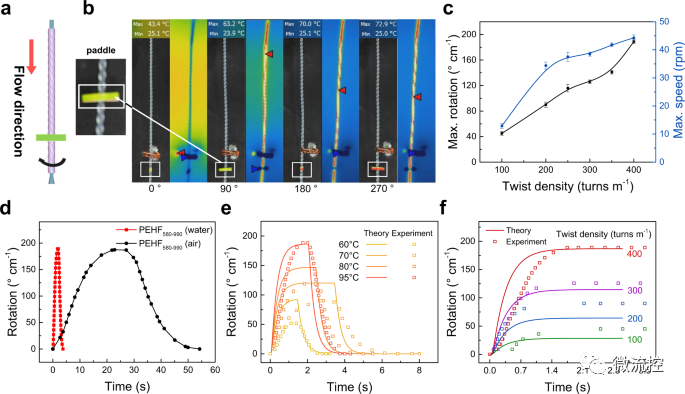
圖2 扭轉(zhuǎn)PEHF580-990驅(qū)動器的驅(qū)動性能
而拉伸中空纖維驅(qū)動器根據(jù)卷曲和扭轉(zhuǎn)方向表現(xiàn)出不同的手性——相同的卷曲和扭轉(zhuǎn)方向產(chǎn)生的是同手性線圈,線圈體積膨脹時會收縮;相反的卷曲和扭轉(zhuǎn)方向產(chǎn)生的是異手性線圈,線圈體積膨脹時會膨脹。
進(jìn)一步研究發(fā)現(xiàn),當(dāng)輸送流體的溫度發(fā)生變化時,線圈中空纖維驅(qū)動器的快速響應(yīng)和大驅(qū)動行程允許精確的傳感和微流體操作,可以實時顯示液體的溫度,并為不同溫度的液體分類到所需容器提供可能性。
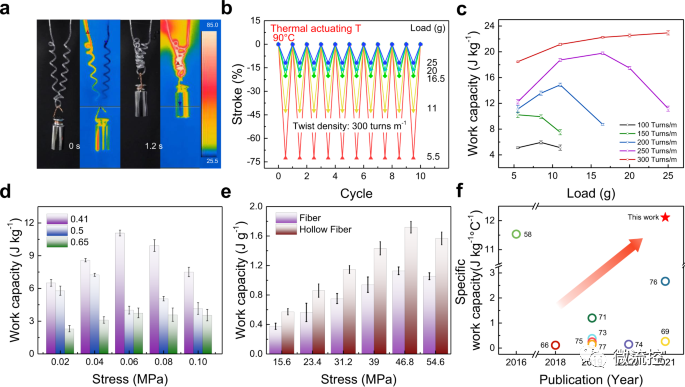
圖3 流體驅(qū)動的同手性中空纖維驅(qū)動器的驅(qū)動性能
總體而言,扭轉(zhuǎn)和拉伸中空纖維驅(qū)動器可以用于微流體操控,并根據(jù)液體溫度對輸送液體進(jìn)行精確的旋轉(zhuǎn)和平移。其中,扭轉(zhuǎn)型中空纖維驅(qū)動器可以在液體在不同溫度下流動時進(jìn)行不同角度的旋轉(zhuǎn)。同手性拉伸中空纖維驅(qū)動器在輸送不同溫度的液體時可以收縮不同長度,可收縮驅(qū)動器可以通過收縮不同長度輸送和分類液體。
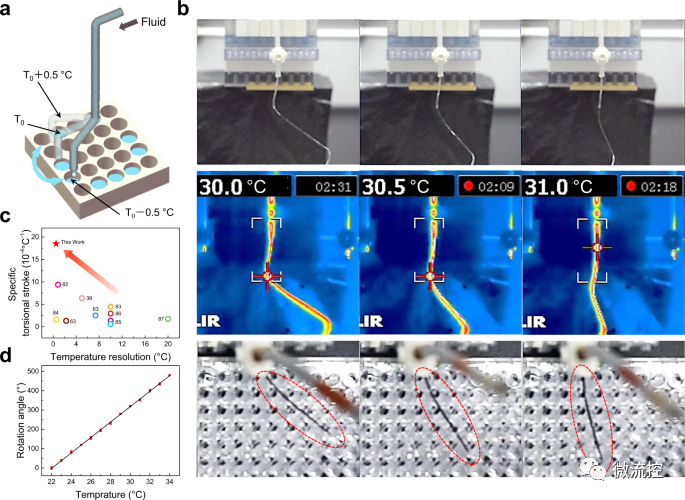
圖4 PEHF580-990驅(qū)動器的微流體傳感和操作
此外,研究人員還演示了中空纖維驅(qū)動器作為夾子捕捉對象,實現(xiàn)提升2g負(fù)載和釋放負(fù)載,這為中空纖維驅(qū)動器在軟機(jī)器人和工業(yè)制造中作為響應(yīng)速度快、行程大的人造肌肉的應(yīng)用提供了可能性。
總之,該項研究為高通量生物傳感和藥物合成提供了一個新的平臺。流體驅(qū)動驅(qū)動器的快速響應(yīng)和高功率密度保證了其在外骨骼和人工肌肉方面的應(yīng)用,例如:開發(fā)強(qiáng)大的軟機(jī)器人和自動化生產(chǎn)線。此外,獨特的設(shè)計為生物標(biāo)記物傳感和藥物控制釋放、3D打印機(jī)、變形飛機(jī)、智能建筑和其他光學(xué)或磁性應(yīng)用等設(shè)備的開發(fā)提供了新的機(jī)遇。
論文鏈接:
https://doi.org/10.1038/s41467-022-29088-9
審核編輯 :李倩
-
傳感器
+關(guān)注
關(guān)注
2567文章
53079瀏覽量
768220 -
驅(qū)動器
+關(guān)注
關(guān)注
54文章
8703瀏覽量
150133 -
微流體
+關(guān)注
關(guān)注
0文章
38瀏覽量
8708
原文標(biāo)題:螺旋中空纖維驅(qū)動器實現(xiàn)微流體的快速傳感和操控
文章出處:【微信號:Micro-Fluidics,微信公眾號:微流控】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
Teledyne微型燃料氧電池

適配多種系統(tǒng),米爾瑞芯微RK3576核心板解鎖多樣化應(yīng)用
泰克設(shè)備在微流控技術(shù)研究中的應(yīng)用

Aigtek功率放大器在微流控醫(yī)學(xué)領(lǐng)域研究中有哪些應(yīng)用
一種基于分?jǐn)?shù)階 PID 直流電機(jī)調(diào)速的 AGV 控制系統(tǒng)
一種基于MASt3R的實時稠密SLAM系統(tǒng)
用于微液滴的連續(xù)流動洗滌微流控系統(tǒng)
為電機(jī)一體化應(yīng)用提供一種大電流單通道集成電機(jī)驅(qū)動芯片

基于磁珠操控的微流控平臺實現(xiàn)副溶血性弧菌的快速捕獲與檢測

S型微流控芯片的優(yōu)勢
mems傳感器是什么意思_mems傳感器原理是什么
解決方案丨EasyGo新能源系統(tǒng)實時仿真應(yīng)用
ATA-1372A寬帶功率放大器在超聲驅(qū)動噴嘴微液滴制備中的應(yīng)用
微流控流量控制系統(tǒng)之恒壓泵






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論