 基于電子驅動的人工纖毛的主動超表面
基于電子驅動的人工纖毛的主動超表面
纖毛泵入,是生物有機體在微尺度上控制和操縱液體的一種強有力的策略。然而,盡管近年來在光學、磁和電驅動驅動方面取得了許多進展,但具有應用潛力的工程化纖毛平臺的開發,仍然難以實現。
據麥姆斯咨詢報道,來自美國康奈爾大學的研究人員開發了基于電子驅動的人工纖毛的主動超表面,可以在液體表面附近創建任意的流動模式。相關論文以題為“Cilia metasurfaces for electronically programmable microfluidic manipulation”發表在Nature上。
纖毛泵送是微觀世界中最重要、最普遍的流體輸送方法之一,一些開創性的研究,已經展示了基于壓力、光、靜電和磁相互作用的驅動制造人工纖毛的方法,然而,這些系統有嚴重的局限性,使其在微尺度上實施起來很有挑戰性。此外,目前還沒有明確的方法,將它們與移動微型機集成,同時保持局部驅動。靜電驅動纖毛,已被證明是一種強大的快速泵送和混合的方法。然而,到目前為止所演示的驅動器都是由大電壓驅動的。這種巨大的電壓,使得它們與用于無線控制的互補金屬氧化物半導體(CMOS)電子器件不兼容。此外,因為在大約1.2V以上的電壓下會水解,所以靜電驅動纖毛不能在水溶液中工作。
近年來,磁響應材料制造人工纖毛的研究成為了新的關注焦點,目前相關研究已經取得了一定成果。然而,在這種磁性系統中,很難定位驅動或改變纖毛的原位磁化來重新配置流動。因此,為了廣泛采用這種傳輸方法,仍然需要開發新型人工纖毛平臺。
康奈爾大學研究人員開發的表面電化學致動器,可以用來克服以上這些挑戰。具體來看,研究人員開發的人工纖毛由一個大約50μm長,5μm寬,約10nm薄的光刻制造的條組成,附著在基板的一端,如圖1a所示。人工纖毛在磷酸鹽緩沖鹽水(PBS)中將其相對于Ag/AgCl參比電極的電位提高到約1V,從而觸發暴露鉑表面的電化學氧化,同時避免了氣泡的形成。
而氧化使Pt表面膨脹,導致致動器彎曲(圖1a,紅色反應途徑,左→右)。接著,研究人員施加電壓還原Pt膜,使驅動器恢復到初始狀態(圖1a,藍色反應途徑,右→左),其電流密度約為1mA/cm2,這意味著一個完全被人工纖毛覆蓋的1cm × 1cm器件在掃描速率為1V/s時僅消耗約1mW的功率。
為了防止致動器扭曲,研究人員沿每根纖毛設計了三個水平聚合物襯墊,每根纖毛之間間隔15μm。由于表面電化學執行器可以光刻制造,一個4英寸的晶圓上可以制造數百萬個。在圖1b的右下角為纖毛橫切面的環形暗場掃描透射電子顯微鏡(STEM)圖像。
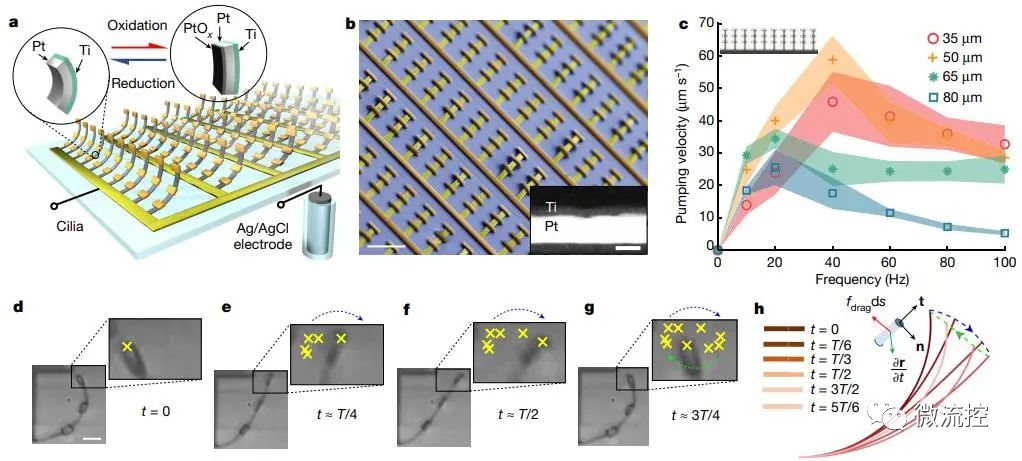
圖1 基于表面電化學執行器的人工纖毛
此外,研究人員開發的電壓驅動纖毛,在1伏特的驅動電壓下,可以產生非交互運動以每秒幾十微米的速度驅動表面流動,且可以局部創建一系列元素流幾何形狀,其纖毛超表面可以產生和切換任何所需的表面流動模式。
最后,研究人員將纖毛與光動力互補金屬氧化物半導體(CMOS)時鐘電路集成,以演示無線操作。作為概念證明,研究人員使用該電路輸出具有不同相位延遲的電壓脈沖,以證明使用元時波提高泵浦效率。這些強大的結果,通過實驗和理論計算得到了證實,說明其有實現精細尺度微流體操縱的潛力。
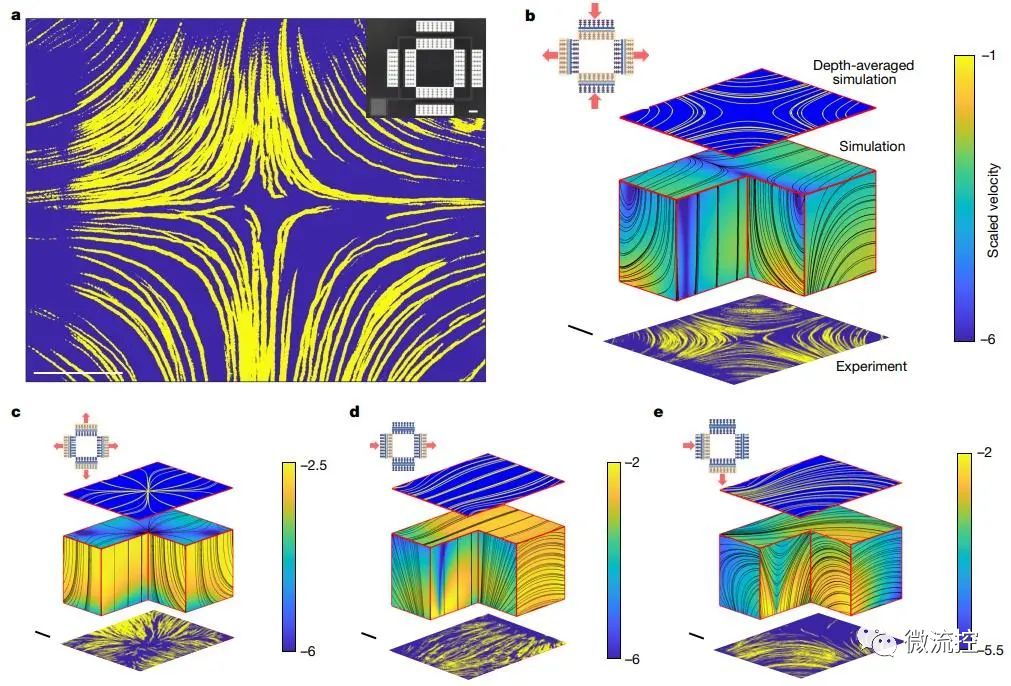
圖2 由纖毛單元產生的基本流動模式
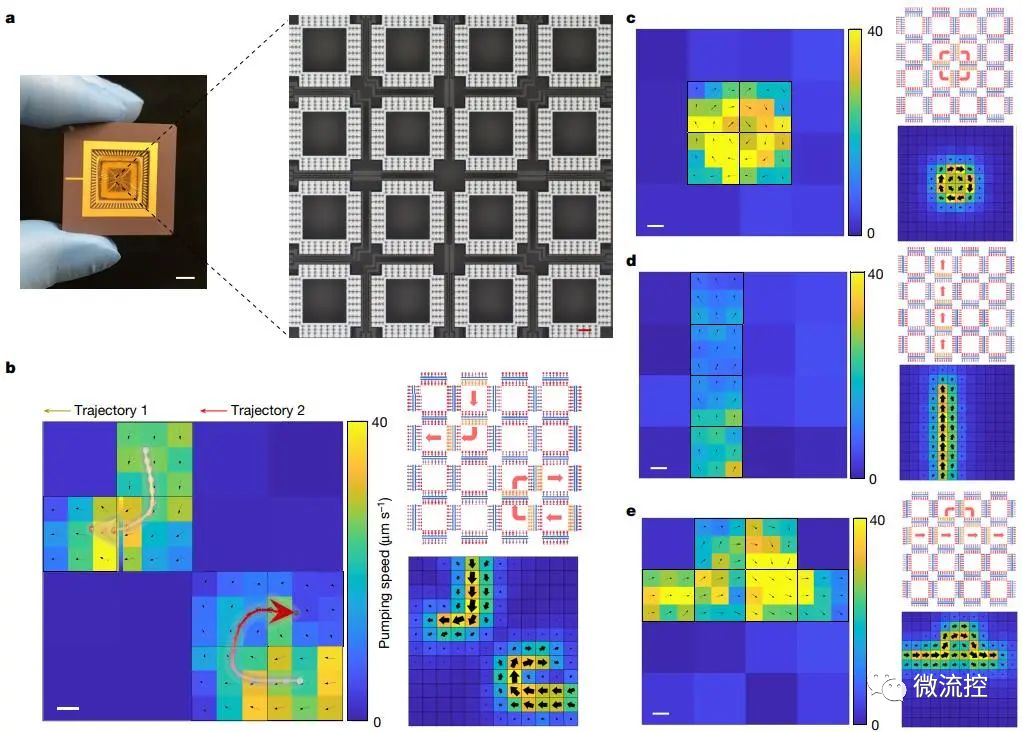
圖3 纖毛超表面能夠產生任意和可切換的微流體流
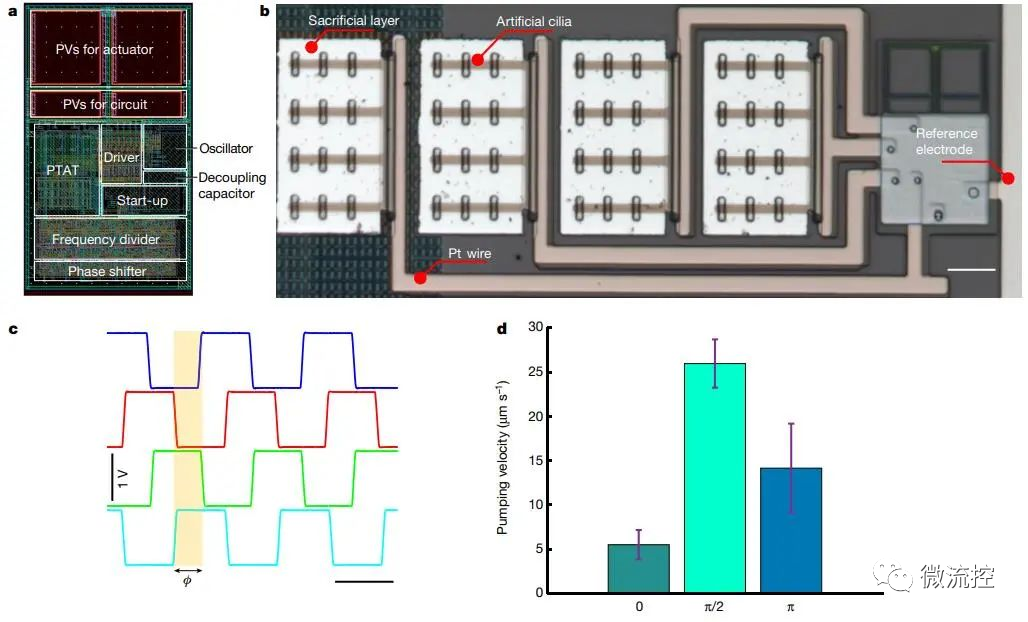
圖4 集成人工纖毛陣列的CMOS無線控制產生的元時波
綜上所述,研究人員提出的實驗和模擬,預測了其開發的人工纖毛平臺在水介質中實現無束縛控制和任意切換微流體操作的良好前景。例如,集成傳感器的光學驅動CMOS電路,可以用來測量周圍流體的化學、光學和熱狀態,以便選擇合適的微流體操作,因此具有在簡單的陽光照射下,使流體在輕型設備中的大量應用的潛能。
論文鏈接:
https://doi.org/10.1038/s41586-022-04645-w
審核編輯 :李倩
-
半導體
+關注
關注
334文章
27432瀏覽量
219259 -
微流體
+關注
關注
0文章
34瀏覽量
8561
原文標題:用于電子可編程微流體操縱的纖毛超表面
文章出處:【微信號:Micro-Fluidics,微信公眾號:微流控】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
基于相變材料的可重構超構表面用于圖像處理
《AI for Science:人工智能驅動科學創新》第一章人工智能驅動的科學創新學習心得
名單公布!【書籍評測活動NO.44】AI for Science:人工智能驅動科學創新
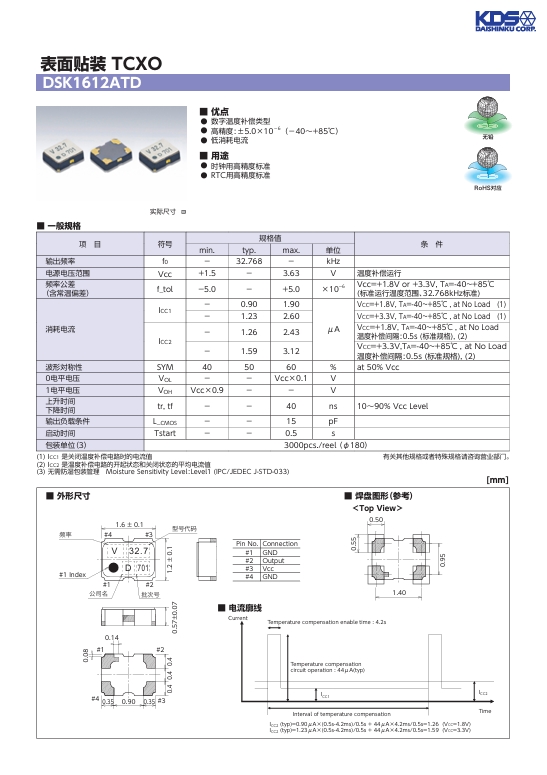
表面貼裝 TCXO 汽車電子用 DSK1612ATD:精準驅動汽車電子的卓越之選
Python中的人工智能框架與實例
一種基于液晶的新型可調介電超構表面,為傳統液晶器件帶來經濟價值


山河光電品牌升級為山河元景,超表面光AI技術推動光學產業變革

采用端到端的逆設計方法實現多維度多通道超構表面全息設計

嵌入式人工智能的就業方向有哪些?
超構表面在微測輻射熱計中的應用綜述

基于超表面天線陣列的射頻前端與數字后端聯合抗干擾方案






 工商網監
工商網監
評論