 一種基于磁場驅動的軟體微型機器人
一種基于磁場驅動的軟體微型機器人
這是60年前,物理學諾貝爾獎得主費曼先生的幻想,現在,體內的“外科醫生”已成為現實——微型機器人。具有主動轉向能力的遙控微型機器人在醫療應用中具有廣闊的前景。
據麥姆斯咨詢報道,最近,北京理工大學研究人員研究人員開發出一種基于磁場驅動的軟體微型機器人,直徑只有200μm,不僅能憑借出色的控制和轉向能力模擬在血管中“跑酷”,還能操作微型物體!相關研究成果發表在Cyborg and Bionic Systems期刊上。

讓微型機器人動起來,這是第一步。然而這并不容易,因為在微觀世界里,很多物理定律與在宏觀世界里不一樣,微尺度狹窄空間內的物體由于強大的粘附力作用,很難自由地運動。
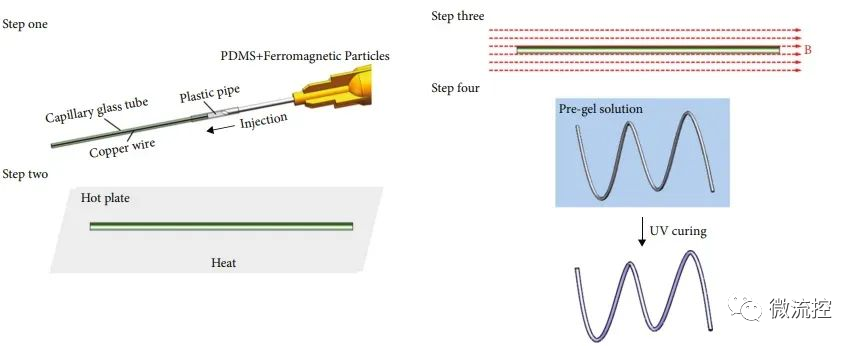
為了解決這個問題,研究人員使用了磁驅動方法,其原理如下:所有帶磁性的物體在勻強的磁場下,都會受到轉動力,讓它本身磁矩的方向與磁場方向同向。
為了給機器人上磁,研究人員將釹鐵硼顆粒和柔軟的有機硅PDMS材料結合,制成微型軟體機器人,并在表面覆蓋了一層生物相容性的水凝膠層,這樣不僅克服了微型物體與機器人軟尖端之間的粘附力,還可降低微型機器人與基板之間的摩擦力,另外還可減小對生物目標的傷害。
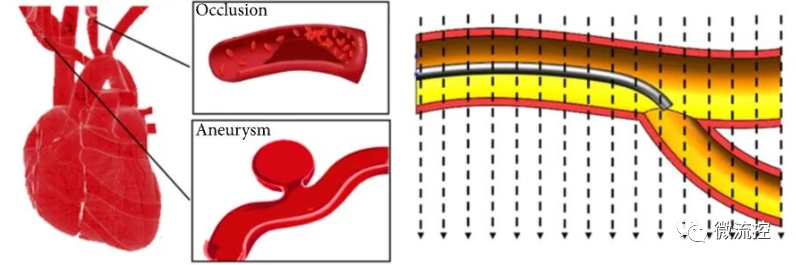
磁驅動系統由一對垂直電磁鐵組成,微型機器人根據磁場進行轉向和振動移動,由于機器人是軟的,可以靈活彎曲身體,這使其能夠在復雜的分叉環境中靈活轉向。
為了測試微型機器人能否在血管里“跑酷”,?研究人員采用3D打印工藝制作了一個寬度為800μm的微流控通道,測試機器人在分叉管道中的轉向和運動能力。
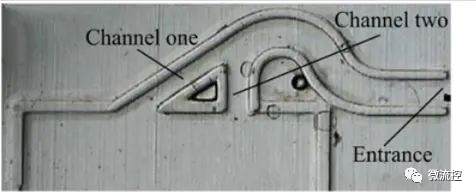
在整個過程中,利用不同方向的磁場來控制微型機器人的轉向,時變磁場可以讓微型機器人振動起來,從而消除與環境之間的粘附力,同時推動前端,讓機器人向前運動。
當微型機器人遇到分叉時,研究人員通過控制電磁鐵,產生平行于目標路徑的磁場,使微型機器人的尖端指向該方向。

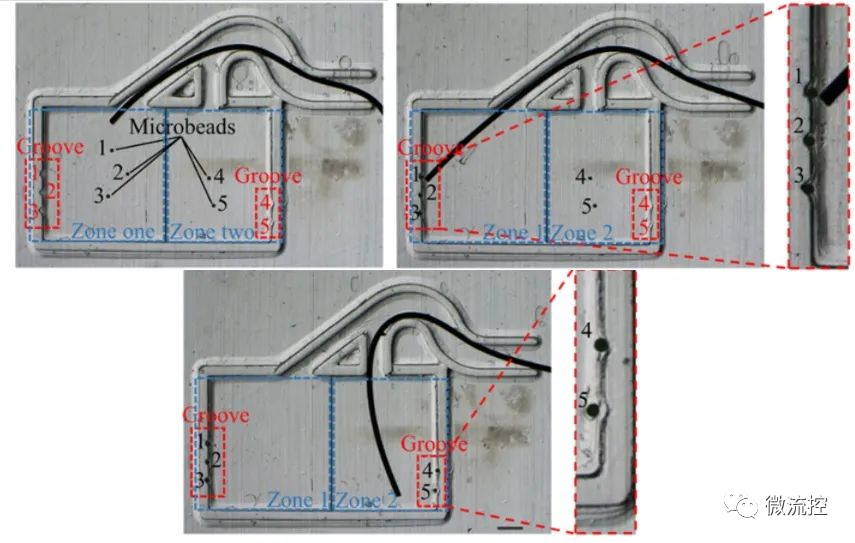
此外,微型機器人還可以操縱微型物體,研究人員設計了一個“搬珠子”游戲,在通道中隨機放置了5個微珠,通道還包含幾個凹槽,微型機器人可以通過磁場控制,穿過層層迷宮將目標珠子“搬”入目標凹槽中,該任務僅需數分鐘就可完成。
在醫學應用里,微型機器人可以作為藥物的載體,在人體內把藥物送到它需要的地方,即“靶向治療”,也可以成為一把“手術刀”,直接進入血管把血栓溶碎,然后帶出來,解決血栓的問題。然而,想讓微型機器人真正應用到體內,還有較長的路要走。
北京理工大學研究人員開發的這款軟體微型機器人能夠在復雜“迷宮”里自如運動和轉彎,并且操縱微型物體,這證明了該微型機器人具有巨大的血管內操作潛力,未來,研究人員計劃進一步減小微型機器人的尺寸,并提高其控制精度。
論文鏈接
https://doi.org/10.34133/2022/9850832
審核編輯 :李倩
-
磁場
+關注
關注
3文章
898瀏覽量
24399 -
微型機器人
+關注
關注
0文章
111瀏覽量
19693
原文標題:基于磁場驅動的軟體微型機器人,用于體內靶向給藥和治療
文章出處:【微信號:Micro-Fluidics,微信公眾號:微流控】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
安泰高壓放大器在介電高彈聚合物驅動器和軟體機器人中的應用

清華大學:軟體機器人柔性傳感技術最新研究進展

伺服電動缸在人形機器人中的應用
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能


基于漩渦湍流輔助的微流控平臺,可實現類精子結構的微型機器人一步成型

高壓放大器在介電彈性體折紙術軟體機器人中的應用

清華大學:軟體機器人柔性傳感技術最新研究進展

微型導軌:手術機器人的高精度“骨骼”

捷克研發微型機器人,捕獲水中塑料廢物及細菌
Aigtek:介電彈性體高壓放大器在軟體機器人研究中的應用






 工商網監
工商網監
評論