") 英創(chuàng)匯智AEBS功能描述與應(yīng)用場(chǎng)景分析
英創(chuàng)匯智AEBS功能描述與應(yīng)用場(chǎng)景分析
引言:ADAS (Advanced Driver Assistance System)作為一種高級(jí)駕駛輔助系統(tǒng),其利用車載信息傳感器獲取道路目標(biāo)信息并對(duì)車輛的行駛做出部分自動(dòng)控制,以此減輕駕駛員的駕駛負(fù)擔(dān)。此外,在主車即將發(fā)生碰撞或失穩(wěn)危險(xiǎn)而駕駛員未及時(shí)采取有效措施時(shí),該系統(tǒng)可對(duì)主車進(jìn)行自動(dòng)安全控制,從而避免交通事故的發(fā)生或減小交通事故的傷害程度。其中ADAS包括AEBS、ACC、LKAS、BSD等功能,本文主要介紹AEBS (Autonomous Emergency Braking System) 的原理,以及英創(chuàng)匯智AEBS系統(tǒng)環(huán)境感知方案的工作機(jī)制。
一、AEBS發(fā)展的意義
據(jù)相關(guān)數(shù)據(jù)分析,導(dǎo)致追尾事故的駕駛員的制動(dòng)行為主要有以下三種:
1.制動(dòng)遲緩:駕駛員全力制動(dòng),但采取措施過(guò)晚;
2.制動(dòng)不足:一般駕駛員采取制動(dòng),卻制動(dòng)過(guò)輕;
3.無(wú)制動(dòng):駕駛員未注意到危險(xiǎn),而未采取制動(dòng)措施;
針對(duì)以上三種交通事故情況,英創(chuàng)匯智研發(fā)出AEBS系統(tǒng)。AEBS是一種主動(dòng)安全技術(shù),通過(guò)傳感器檢測(cè)可能發(fā)生的碰撞危險(xiǎn),提前警示駕駛員制動(dòng),并在必要時(shí)自動(dòng)制動(dòng),防止碰撞的發(fā)生或最大限度的降低碰撞的傷害。
二、AEBS技術(shù)環(huán)境感知配置方案
ADAS系統(tǒng)由環(huán)境感知、控制決策、底層執(zhí)行和人機(jī)交互四個(gè)基礎(chǔ)模塊,具體架構(gòu)如下圖所示:
ADAS整體架構(gòu)詳解
其中,感知模塊由毫米波雷達(dá)和攝像頭組成,通過(guò)雷達(dá)和攝像頭數(shù)據(jù)融合,感知周邊障礙物信息以及可通行區(qū)域信息。控制決策模塊則根據(jù)感知信息,決策所需要的控制指令,向底層執(zhí)行模塊發(fā)出指令,控制車輛制動(dòng)系統(tǒng)來(lái)完成自適應(yīng)跟車和自動(dòng)緊急剎車。而ADAS系統(tǒng)的難點(diǎn),在于環(huán)境精準(zhǔn)識(shí)別以及基于EBS系統(tǒng)/改進(jìn)ABS系統(tǒng)的主動(dòng)制動(dòng)執(zhí)行系統(tǒng)。
AEBS作為ADAS系統(tǒng)中的一個(gè)功能,其環(huán)境感知模塊所需傳感器與ADAS系統(tǒng)一致,主要由毫米波雷達(dá)和攝像頭構(gòu)成,進(jìn)一步地毫米波雷達(dá)與攝像頭優(yōu)缺點(diǎn)以及工作特性總結(jié)如下:

三、AEBS功能描述與應(yīng)用場(chǎng)景分析
AEBS主要包括預(yù)測(cè)碰撞警告 (PCW, Predictive Collision Warning)、緊急制動(dòng)輔助 (EBA, Emergency Brake Assist)、自動(dòng)緊急制動(dòng) (AEB, Autonomous Emergency Braking)等子功能。
3.1AEBS功能描述
(1)PCW:該功能主要針對(duì)追尾交通事故中場(chǎng)景一,當(dāng)駕駛員沒(méi)有意識(shí)到行車過(guò)程中即將到來(lái)的危險(xiǎn)時(shí),通過(guò)在駕駛艙內(nèi)發(fā)出蜂鳴聲、收緊安全帶甚至車輛突然制動(dòng)抖動(dòng)等警告措施,提醒駕駛員即將到來(lái)的危險(xiǎn),進(jìn)而避免事故的發(fā)生。根據(jù)駕駛員的設(shè)置,AEBS可以實(shí)現(xiàn)不同敏感性的PCW,其具體工作參數(shù)與觸發(fā)條件如下圖所示:
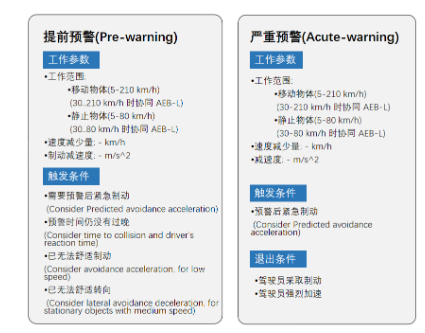
不同敏感性的PCW對(duì)比
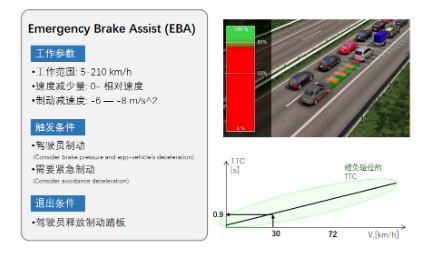
(2)EBA:該功能主要針對(duì)追尾交通事故中場(chǎng)景二,當(dāng)駕駛員踩下制動(dòng)踏板進(jìn)行制動(dòng),但由于駕駛員經(jīng)驗(yàn)不足或者一些其他原因,使得車輛無(wú)法按照駕駛員預(yù)期制動(dòng)效果進(jìn)行制動(dòng)時(shí),通過(guò)控制器自行分析決策,合理控制車輛制動(dòng)(放大根據(jù)駕駛員意圖控制的制動(dòng)力矩),保證駕駛員的安全。進(jìn)一步地EBA功能工作參數(shù)與切換條件總結(jié)如下:
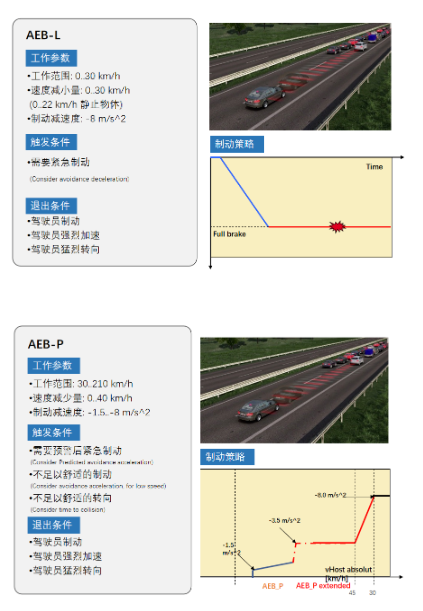
(3)AEB: 該功能主要針對(duì)追尾交通事故場(chǎng)景三,即當(dāng)車輛觸發(fā)了PCW功能以后,也并未成功警示駕駛員,這時(shí)車輛完全由控制器接管,進(jìn)行制動(dòng)控制。該功能在最大限度上避免交通事故的發(fā)生,當(dāng)交通事故無(wú)法避免時(shí)也可減輕交通事故帶來(lái)的傷害。當(dāng)兩車之間運(yùn)動(dòng)學(xué)關(guān)系不同時(shí),AEB功能會(huì)提供不同制動(dòng)策略(低速場(chǎng)景下為AEB-L功能,其余場(chǎng)景下為AEB-P功能),如下所示:
3.2AEBS應(yīng)用場(chǎng)景分析
搭載AEBS的車輛在行駛過(guò)程中各子功能工作過(guò)程如下圖所示:
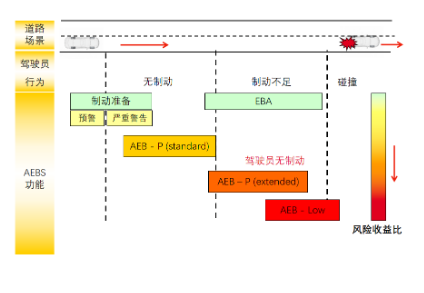
在車輛正常行駛過(guò)程中,當(dāng)前方有障礙物碰撞風(fēng)險(xiǎn)時(shí),首先觸發(fā)PCW功能對(duì)駕駛員進(jìn)行警告,隨著車輛的行駛,一種情況是如果駕駛員踩下制動(dòng)踏板但制動(dòng)不足時(shí)觸發(fā)EBA功能(或者駕駛員完全制動(dòng)不觸發(fā)EBA功能);另一種情況是駕駛員沒(méi)有踩下制動(dòng)踏板,這時(shí)AEB功能觸發(fā),根據(jù)當(dāng)前車輛與前方障礙物的關(guān)系,AEB功能對(duì)本車進(jìn)行不同強(qiáng)度的制動(dòng)控制,最后避免交通事故的發(fā)生或者減輕交通事故的傷害。
搭載AEBS的車輛在行駛過(guò)程中子功能觸發(fā)后制動(dòng)力如下圖所示:
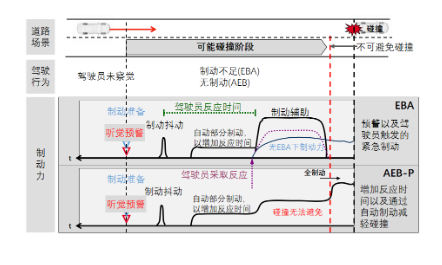
隨著車輛的行駛,首先觸發(fā)PCW,其中通過(guò)突然制動(dòng)抖動(dòng)來(lái)提醒駕駛員,因此存在制動(dòng)力變化;然后考慮到安全性,AEBS功能會(huì)進(jìn)行自動(dòng)部分制動(dòng)以增加駕駛員反映時(shí)間,來(lái)避免交通事故;最后根據(jù)駕駛員的實(shí)際操作來(lái)判斷觸發(fā)EBA功能還是AEB功能,進(jìn)而避免交通事故或者減少碰撞傷害。
四、AEBS 決策與規(guī)劃層分析
4.1AEBS 算法架構(gòu)
AEBS主要通過(guò)車輛搭載的攝像頭以及毫米波雷達(dá)(也可單獨(dú)使用攝像頭)進(jìn)行周圍環(huán)境的感知建圖,通過(guò)與CAN網(wǎng)絡(luò)通訊獲取自身車輛狀態(tài)信息,進(jìn)一步地根據(jù)本車信息與周圍環(huán)境信息進(jìn)行判斷,當(dāng)滿足各子功能觸發(fā)條件時(shí),各功能開始工作,從而避免交通事故的發(fā)生或減小交通事故的傷害程度。其算法架構(gòu)如下圖所示:
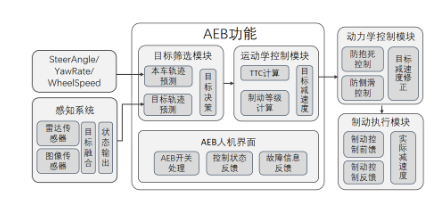
AEBS算法架構(gòu)
AEB算法主要分為四大模塊:感知系統(tǒng)模塊、AEB功能模塊、動(dòng)力學(xué)控制模塊和制動(dòng)執(zhí)行模塊。其中AEBS各子功能的不同之處在于本車與前方障礙物之間的運(yùn)動(dòng)學(xué)關(guān)系以及車輛自身狀態(tài),AEBS根據(jù)獲取的相關(guān)信息進(jìn)行不同危險(xiǎn)程度的判斷進(jìn)而觸發(fā)不同子功能。
4.2子模塊間關(guān)系
感知系統(tǒng)將融合后的障礙物信息發(fā)送到目標(biāo)篩選模塊,與此同時(shí)本車軌跡預(yù)測(cè)模塊根據(jù)本車相應(yīng)運(yùn)行狀態(tài)計(jì)算轉(zhuǎn)彎半徑。轉(zhuǎn)向半徑計(jì)算模塊計(jì)算出車輛的轉(zhuǎn)向半徑,被目標(biāo)篩選模塊、TTC計(jì)算模塊、FCW激活條件判斷和AEB激活條件判斷所使用。目標(biāo)篩選模塊通過(guò)橫向距離篩選出最危險(xiǎn)的目標(biāo)障礙物,最危險(xiǎn)的目標(biāo)障礙物信息被TTC計(jì)算模塊和目標(biāo)減速度計(jì)算模塊。TTC計(jì)算模塊通過(guò)與目標(biāo)障礙物的相對(duì)距離和相對(duì)速度計(jì)算出實(shí)時(shí)TTC,計(jì)算出的TTC被預(yù)警模塊和緊急制動(dòng)模塊所使用。目標(biāo)減速度計(jì)算模塊本著使車輛停在安全距離范圍內(nèi)的原則,對(duì)目標(biāo)減速度進(jìn)行計(jì)算,計(jì)算出的目標(biāo)減速度被緊急制動(dòng)模塊所使用。預(yù)警模塊根據(jù)危險(xiǎn)程度通過(guò)預(yù)警邏輯向執(zhí)行層發(fā)出預(yù)警指令。緊急制動(dòng)模塊根據(jù)危險(xiǎn)程度通過(guò)緊急制動(dòng)邏輯向執(zhí)行層發(fā)出制動(dòng)指令。預(yù)警模塊和緊急制動(dòng)模塊向底層發(fā)出制動(dòng)指令的同時(shí)也向人機(jī)交互模塊發(fā)送信號(hào)燈和聲音執(zhí)行指令,人機(jī)交互模塊同樣也可以通過(guò)按鈕來(lái)控制預(yù)警模塊和緊急制動(dòng)模塊。
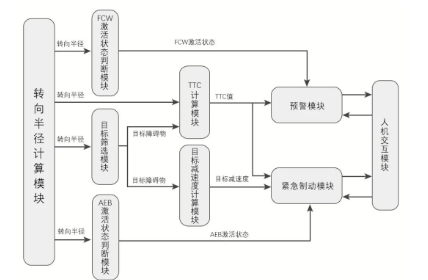
子模塊關(guān)系圖
(1)感知系統(tǒng)模塊
感知系統(tǒng)模塊主要包括雷達(dá)傳感器目標(biāo)探測(cè),攝像傳感器目標(biāo)識(shí)別,以及兩者目標(biāo)檢測(cè)的融合。
(2)AEB功能模塊
■ AEB人機(jī)界面;該部分主要與駕駛員互動(dòng)用,集成AEB開關(guān),顯示控制狀態(tài)和故障信息;
■ 目標(biāo)篩選模塊:該部分主要針對(duì)雷達(dá)和攝像頭檢測(cè)出來(lái)的目標(biāo)進(jìn)行篩選,根據(jù)本車軌跡預(yù)測(cè)和目標(biāo)軌跡預(yù)測(cè),判斷判斷兩車的運(yùn)動(dòng)軌跡是否重合,存在潛在的碰撞可能性,以此來(lái)確定目標(biāo)車輛;
■ AEB運(yùn)動(dòng)學(xué)控制模塊:搭建TTC模型,計(jì)算出將要碰撞的時(shí)間t,并根據(jù)車速v和碰撞時(shí)間t計(jì)算出制動(dòng)等級(jí),并制定每個(gè)等級(jí)下的目標(biāo)減速度。
自車與目標(biāo)車輛的縱向車速之差,計(jì)算方法見(jiàn)公式:

(3)動(dòng)力學(xué)控制模塊
■ 由上一個(gè)模塊得到了目標(biāo)減速度,但是并沒(méi)有考慮整車的動(dòng)力學(xué)特性。實(shí)際的目標(biāo)減速度還要根據(jù)動(dòng)力學(xué)特征,在防抱死控制和防側(cè)滑控制的基礎(chǔ)下進(jìn)一步的修正目標(biāo)減速度。
(4)制動(dòng)執(zhí)行模塊
■ 制動(dòng)執(zhí)行模塊主要由ESC完成,ESC為電子穩(wěn)定系統(tǒng),連接ABS模塊,可以在汽車緊急制動(dòng)時(shí)保證汽車的穩(wěn)定性,按要求執(zhí)行AEB給出的目標(biāo)減速度。
五、碰撞風(fēng)險(xiǎn)評(píng)估準(zhǔn)則
TTC (Time-to-collision) 是一個(gè)經(jīng)典的碰撞風(fēng)險(xiǎn)評(píng)估的準(zhǔn)則,但其無(wú)法有效反映車輛行駛過(guò)程中潛在的風(fēng)險(xiǎn),因此下面介紹幾種碰撞風(fēng)險(xiǎn)評(píng)估準(zhǔn)則:
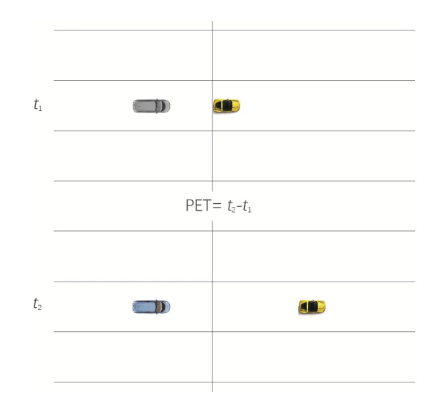
(1)PET (Post-encroachment time) 是一輛車進(jìn)入沖突點(diǎn)的時(shí)間 (t2) 與另一輛車到達(dá)該點(diǎn)的時(shí)間 (t1) 之差,具體情況見(jiàn)下圖:
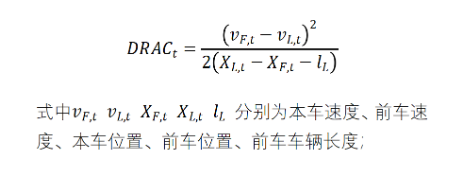
(2)DRAC (Deceleration rate to avoid collision) 能夠很好察覺(jué)車輛行駛過(guò)程的潛在危險(xiǎn),其計(jì)算公式如下:
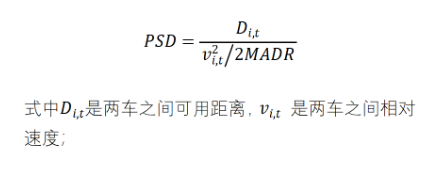
(3)PSD (Proportion of stopping distance) 是兩輛車之間可用的距離與MADR (最大可用DRAC所需的距離)之比,具體計(jì)算公式如下:
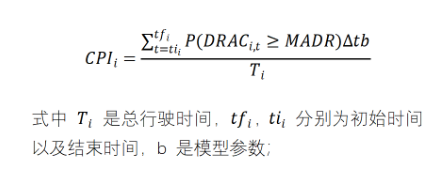
(4)CPI (Crash potential index) 是某時(shí)刻避免碰撞的減速率(DRAC)超過(guò)MADR的概率,其中MADR 會(huì)受到車輛種類以及道路環(huán)境的影響,具體計(jì)算公式如下:
鑒于TTC在衡量車輛碰撞風(fēng)險(xiǎn)上存在缺陷,目前本公司借鑒上述碰撞風(fēng)險(xiǎn)評(píng)估準(zhǔn)則,正在逐步開發(fā)新型的碰撞風(fēng)險(xiǎn)評(píng)估準(zhǔn)則。
-
攝像頭
+關(guān)注
關(guān)注
60文章
4851瀏覽量
95890 -
雷達(dá)傳感器
+關(guān)注
關(guān)注
3文章
286瀏覽量
34485 -
駕駛輔助系統(tǒng)
+關(guān)注
關(guān)注
0文章
106瀏覽量
16650 -
英創(chuàng)匯智
+關(guān)注
關(guān)注
0文章
28瀏覽量
513
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論