 V2X和自動駕駛的整體方法
V2X和自動駕駛的整體方法
在許多方面,寶馬和梅賽德斯等公司最近發布的自動駕駛概念車都本末倒置。盡管 Google 無人駕駛汽車的成就是不可否認的,但它們僅提供了完全自主交通基礎設施所需的一小部分快照。
除了對未來的這些孤立的一瞥之外,還需要全面部署車對車和車對基礎設施或 V2X 技術,以推動自動駕駛汽車從測試實驗室和受控環境到開放的大眾市場采用路。V2X 架構由跨越汽車行業所有層級以及網絡基礎設施(從車載設備和應用程序到云)的元素組成,并通過無縫連接將傳感器信息和大數據拼接在一起,形成運輸中的系統系統根據。Meg Divitto 說,雖然仍處于早期階段,但 V2X 是汽車行業數十年發展的產物,現在正達到工業和政府的轉折點,這將有助于開創汽車和互聯交通的新時代。
“由于它與汽車行業的發展有關,早期它是一個具有一些控制邏輯的機械系統,”Divitto 說。“這在 80 年代和 90 年代轉移到了機電系統,這意味著它是一個機電系統,在汽車中進行了更多的電氣操作——從使用按鈕門鎖到電動門鎖,再到使用非常簡單的例子。突然之間出現了更多的電子產品,然后是 90 年代汽車中的軟件時代。軟件開始變得越來越復雜,從基本的控制邏輯轉向復雜的模塊和設備,然后每個人都變得瘋狂。
“因此,您看到內容以快速的速度進入車輛,而汽車制造商由于具有單獨的架構且沒有標準,因此將東西固定在車輛上只是為了裝上東西,”她繼續說道。“而且每個人都聽說過這一點,但汽車中的代碼行數比噴氣式戰斗機中的多,主要是因為它沒有架構,而且模塊是用螺栓固定的。這導致了巨大的復雜性,因為它與軟件質量和車輛質量有關。
“當你看到這種進展時,你會說,‘好吧,我們必須以不同的方式做事,’”Divitto 解釋道。“從這種車輛架構到功能架構已經發生了變化。一些原始設備制造商從 2000 年代開始將他們的設計轉變為能夠進入功能架構,在該架構中,您可以以一種有意義且不允許這種大毛球代碼的方式布置架構和車輛模塊的分區; AUTOSAR 誕生于 2004 年,旨在解決這個問題,并讓所有 OEM 圍繞一個標準的功能性車輛架構聚集在一起,該架構可以為供應商提供通用要求,以便可以使用通用方法來構建、推出、測試和認證。
“但如果你明白這一點,現在就進入下一波浪潮,那就是遠程信息處理,”她說。“現在,車輛相互連接并連接到基礎設施,而且復雜性要高得多。我對行業的看法是,這將導致一個轉折點,架構將不得不回到抽象層方法論,在該方法論中,您從與遠程信息處理相關的所有其他事物中抽象出基本的機械、機電一體化和軟件功能,聯網車輛和 V2V。一旦出現這個臨界點,我們將能夠看到技術的不同進展以及解決復雜性的方式的不同進展。那時事情會更和諧地完成。
V2X 的整體方法
隨著汽車技術的不斷進步,一個特別的領域正在幫助推動 V2X 架構的發展——電子控制單元 (ECU)。隨著大規模多核處理器的出現,ECU 正在演變為域控制器,為聯網汽車中的高級應用提供更高的性能,并實現對各種車輛子系統的更細粒度的控制。盡管從表面上看,這可能被視為 V2X 車輪上的一個非常小的齒輪,但硬件技術的進步為軟件和通信基礎設施的創新開辟了道路,這些基礎設施將作為連接車輛的網關,Artur Seidel 說。
“我們目前處于實現最終目標的早期階段,但我們看待最終目標的方式是,必須對 V2X 采取非常全面的方法,”Seidel 說。“目前,當您查看媒體中的一些故事時,其中有一個系統被嚴重入侵,它往往是一個單獨的系統,被固定在汽車的某個地方,添加到系統中。但是汽車中的系統本身并沒有考慮到連接性,因此必須有一個整體的方法——查看硬件、查看軟件、查看通信。
“如果你回顧幾年,我們最終看到的是,有很多小型 ECU 沒有很好的性能,”Seidel 繼續說道。“現在,事情正在轉向我們所謂的域控制器,它更強大,我們在例如駕駛輔助領域看到了這一點;你在 CES 上看到 NVIDIA 推出了一款名為 X1 的 256 核 CPU,它將用于駕駛輔助應用程序。現在您擁有一個具有所有這些核心的域控制器,那么您現在如何在其之上擁有一個可以利用的軟件層呢?
“Elektrobit 在 AUTOSAR 中非常活躍,我們有一個名為 EB tresos 安全操作系統的安全操作系統,它本質上根據功能是什么,將功能分配給不同安全級別的這些內核。那是軟件部分,第三部分當然是通信部分,我們設想像公鑰或私鑰這樣的非對稱加密,不僅來自汽車,還來自外部和車內組件之間。這是一種組合方法,將是逐步實現的方法,但最終我們將看到這類系統具有強大的多核域、由安全要求構建的安全操作系統軟件汽車,然后對車輛進行嚴格的加密,”他說。
V2X 安全合規性
盡管將多個 ECU 整合到更少、更強大的基于多核芯片的域控制器中有助于降低硬件成本和復雜性,但它也凸顯了自聯網汽車問世以來一直困擾著的安全問題。在今天和過去車輛子系統主要由單個 ECU 控制的情況下,當為在同一域控制器上運行的一組特定應用程序引入連接性時,該控制器還管理安全關鍵功能,您會引入互聯網傳播威脅的可能性整個系統。雖然進入智能手機或筆記本電腦的惡意軟件可能會破壞日常活動,但聯網汽車環境中的惡意軟件或損壞的文件可能會導致災難性故障,從而導致生命損失。
盡管安全關鍵操作系統解決方案可用,但在單個 CPU 上安全地將信息娛樂應用與轉向或制動功能分開是 V2X 開發人員的首要考慮因素,因為它必須以符合嚴格的汽車安全法規的方式進行架構,并另外考慮與互聯網連接相關的安全風險。因此,汽車供應商越來越多地轉向為 V2X 軟件開發提供最佳實踐的行業標準,同時也有助于促進采用統一的安全和安保合規方法。
“追溯到遠程信息處理市場時代,一直被討論為抑制因素的一件事是,如果一輛汽車以每小時 60 英里的速度行駛并被黑客入侵,會發生什么?因此,公眾恐懼癥與安全領域的這個空間有關,”Divitto 說。“解決這個問題的一種方法是通過與創建抽象層的車輛架構相關的標準。就像在飛機中,飛機功能的核心是黑盒的,抽象層之上的其他方面是允許車輛連接的特性和功能。當你開始談論創建抽象層時,就像今天在飛機上一樣,信息娛樂系統不與飛機的操作共享任何東西——不是公共汽車,不是通信,不是設備,沒有什么。這就是我們作為一個行業將要達到的目標,因為它創建了分離,根據某些系統需要與他們周圍的世界。”
“一旦你連接了一個系統,你當然就有可能面臨安全挑戰,比如黑客攻擊等等,”Seidel 說。“因此,通信必須 a) 加密;b) 必須滿足功能安全的要求,因為只有車內的某些子系統才能接收這些更新;c) 就像您在啟動時對未聯網汽車進行非常基本的系統檢查一樣,對于聯網的更復雜的車輛,這些檢查必須更復雜、更精細——例如,如果有人介紹不正確的地圖數據,具有與 V2I 接口通信的傳感器的聯網車輛應該有多種驗證信息的方式。
“隨著我們看到越來越強大的 ECU,我們現在必須將各種車輛系統的劃分組合到一個物理 CPU 上,這符合將安全操作系統與信息娛樂功能相結合的要求,”他繼續說道。“那么你如何安全地實施這種劃分?
“我們使用 ISO 26262,并為此付出了很多努力,”Seidel 繼續說道。“要處理這種多核方法,它又回到了這樣一個事實,即這不是您的智能手機軟件或具有大量軟件負載的 PC 軟件。這些是不同分區的軟件,有助于管理復雜性。對于不同的汽車安全完整性等級 (ASIL) 要求,如果我的轉向系統具有危及生命的 ASIL D 要求,我會以與信息娛樂系統的一部分截然不同的方式對待和劃分它。ISO 26262 有助于管理復雜性,因為它清楚地定義了要求,因此當我處理 ASIL D 系統時,我不會通過共享內存或非加密訪問提供任何東西。”
除了在車輛子系統之間實施安全的軟件架構外,V2X 系統的開發人員還面臨著測試和驗證聯網汽車如何與其他車輛及其周圍環境交互的挑戰。現代汽車中的數百萬行代碼不僅使這些驗證工作變得復雜,而且 OEM 和一級供應商還面臨這樣一個事實,即幾乎不可能測試車輛在道路上可能遇到的所有場景。作為回應,ETSI 和 Car2Car 通信聯盟等組織正在積極努力為聯網車輛定義合規性測試和測試場景,而軟件供應商正在轉向模擬技術來幫助降低成本并加快上市時間,首席產品官 André Rolfsmeier 說dSPACE GmbH 經理。
“V2X 應用程序,如交叉路口輔助、避免碰撞或危險警告系統,通常是通過基于模型的設計方法開發的,并通過仿真進行測試,”Rolfsmeier 說。“dSPACE 提供了專用工具,用于通過使用開環和閉環仿真的虛擬測試驅動器來測試 V2V 和 V2I 應用程序。通過這種方式,可以在實驗室中使用真實場景對ECU軟件進行測試,并在開始實際試駕之前提高相關的軟件成熟度水平。這種方法可以顯著減少汽車行業的開發時間和成本。
“此外,dSPACE 快速原型設計系統已廣泛應用于汽車行業。例如,這些系統允許在較短的迭代周期內開發 V2X 應用程序并直接在車輛中體驗,”Rolfsmeier 補充道。
V2X 推動通信融合
雖然 V2V 和 V2I 通信不會用作侵入式制動等安全關鍵功能的最終控制回路,但它們對于傳輸有關車輛周圍環境以及即將到來的道路和交通狀況的信息至關重要,這些信息可以與其他車輛融合傳感器數據為駕駛員以及未來的自動駕駛汽車提供更清晰的環境圖。隨后,V2X 連接架構通常需要低于 100 微秒的延遲,尤其是在應用于避免碰撞等應用時。
目前有多種連接技術可用于促進 V2V 和 V2I 數據的傳輸,但尚未就最終在國家或全球范圍內采用的最終共識達成一致。這促使行業調查用于聯網車輛的現有和新興通信類型,因為缺乏政府監管可能會迫使汽車制造商在未來支持多種無線標準。
“對于 V2V 以及部分 V2I,設備之間需要直接、低延遲的臨時通信,因為通常相關的應用程序與安全相關,”Rolfsmeier 說。“V2V 和 V2I 要求車輛和交通基礎設施(如交通信號燈、信標和道路工作標志)配備專用的 WLAN 通信模塊。因此,如果不強制引入這項技術,OEM 將不得不考慮商業模式和車輛設備選項,例如將 V2V、V2I 和某些 ADAS 功能打包到一個專用選項中。”
“在美國、歐盟和日本,目前使用不同的汽車專用 WLAN 自組織網絡實施,因此沒有全球標準,”Rolfsmeier 繼續說道。“未來幾年,美國可能會強制實施 V2V 和 V2I,但尚未做出最終決定。就目前的情況而言,歐盟的政府并不傾向于規范這項技術的引入。”
“目前在車輛之外,它將是 802.11p。這至少是人們計劃的標準,”Seidel 說。“好消息是北美和歐洲目前正在采用該標準,但我也聽說一些蜂窩提供商開始將所謂的 LTE Direct 定位為替代方案。現在還為時尚早,但這利用了 Wi-Fi 和 LTE 調制解調器,我們都知道它們的發展速度有多快。因此,我們將看到更多提高速度和通信訪問的選項。”
“為了節省開發成本和時間,必須協調各個汽車 WLAN 自組織網絡實施,”Rolfsmeier 說。“否則,像 dSPACE 這樣的汽車制造商和工具供應商如果打算在全球范圍內支持 V2V 和 V2I 通信,他們可能不得不對所有不同的實施進行投資。
“我們將特定區域的 WLAN ad hoc 網絡實施視為 V2V 和 V2I 的中間解決方案,”Rolfsmeier 說。“對于汽車制造商和汽車司機來說,車對后端服務器 (V2B) 通信似乎也是一個有吸引力的用例。相關的 V2B 架構包括車輛中的 3G/4G LTE 通信模塊、通常由 OEM 運行的后端服務器,以及對于某些功能,允許使用大數據分析和評估數千輛汽車的汽車云。在這種情況下,重要的是要注意 3G/4G LTE 是一種通用的、非汽車專用的全球標準,并且由于通用汽車的 OnStar 等緊急呼叫系統和寶馬輔助。此外,智能手機利用 3G/4G,智能手機在現代汽車中的更緊密集成也迫在眉睫。使用移動通信技術,車輛連接到云中的后端服務器,OEM 可以通過這些服務器提供特定服務、無線 (OTA) 軟件更新或動態導航數據以及有關地圖的最新信息、實時交通、道路工程、交通標志、停車位和其他基于位置的服務。
“此外,目前正在研究一種名為 5G 的新移動通信網絡標準——4G LTE 的繼任者,”他繼續說道。“5G 應該在 2020 年準備就緒,據說它還支持低延遲的 ad hoc 設備到設備通信,而無需移動網絡供應商的基站。如果這成為現實,5G 可能是 V2V、V2I 和 V2B 的未來技術。
V2X 和自動駕駛汽車——雙向街道
盡管 V2X 架構仍處于起步階段,但技術的進步、標準的演變以及行業和政府之間的協作正在融合在一起,以引導通往自動駕駛的道路。IBM 和 Continental 的 Connected Electronic Horizo??n 計劃等合作伙伴、Black Hat 的 I Am The Cavalry等草根組織以及汽車聯盟 等行業聯盟只是其中的幾個例子。汽車領域圍繞 V2X 技術產生的協同效應,其結果已經顯現。
“在 CES 上,一些供應商使用的一個術語是‘群智能’,”Seidel 說。“一些原始設備制造商展示的其中一個應用是停車位查找器,其中汽車使用自動停車來尋找停車位并使用自動功能離開停車位,然后與其他汽車通信,現在有另一個停車位現貨。所以這不僅僅是一個安全討論,而是一個效率討論——所有這些事情都通過 V2X 實現。您不需要自動駕駛汽車即可從 V2X 中受益,但 V2X 和自動駕駛可以完美地結合在一起,因為您可以比非自動駕駛汽車更好地駕駛自動駕駛汽車。
“當然,這是一個主題,根據定義,您必須解決需要標準化的沖突,同時需要 OEM 區分他們的產品,”他繼續說道。“我認為我們正走在良好的軌道上,隨著 V2X 與自動駕駛相結合的好處變得更加明顯,這將加速。V2X 將與自動駕駛汽車攜手開發,我們肯定會在該領域與我們的客戶合作。在接下來的 10 到 20 年,你會看到這兩者并行發展。”
審核編輯:郭婷
-
汽車電子
+關注
關注
3026文章
7941瀏覽量
166911 -
無線
+關注
關注
31文章
5450瀏覽量
173244 -
服務器
+關注
關注
12文章
9123瀏覽量
85328
發布評論請先 登錄
相關推薦
基于V2X和自動駕駛HIL聯調的仿真測試系統開發

如何應對V2X頻譜挑戰
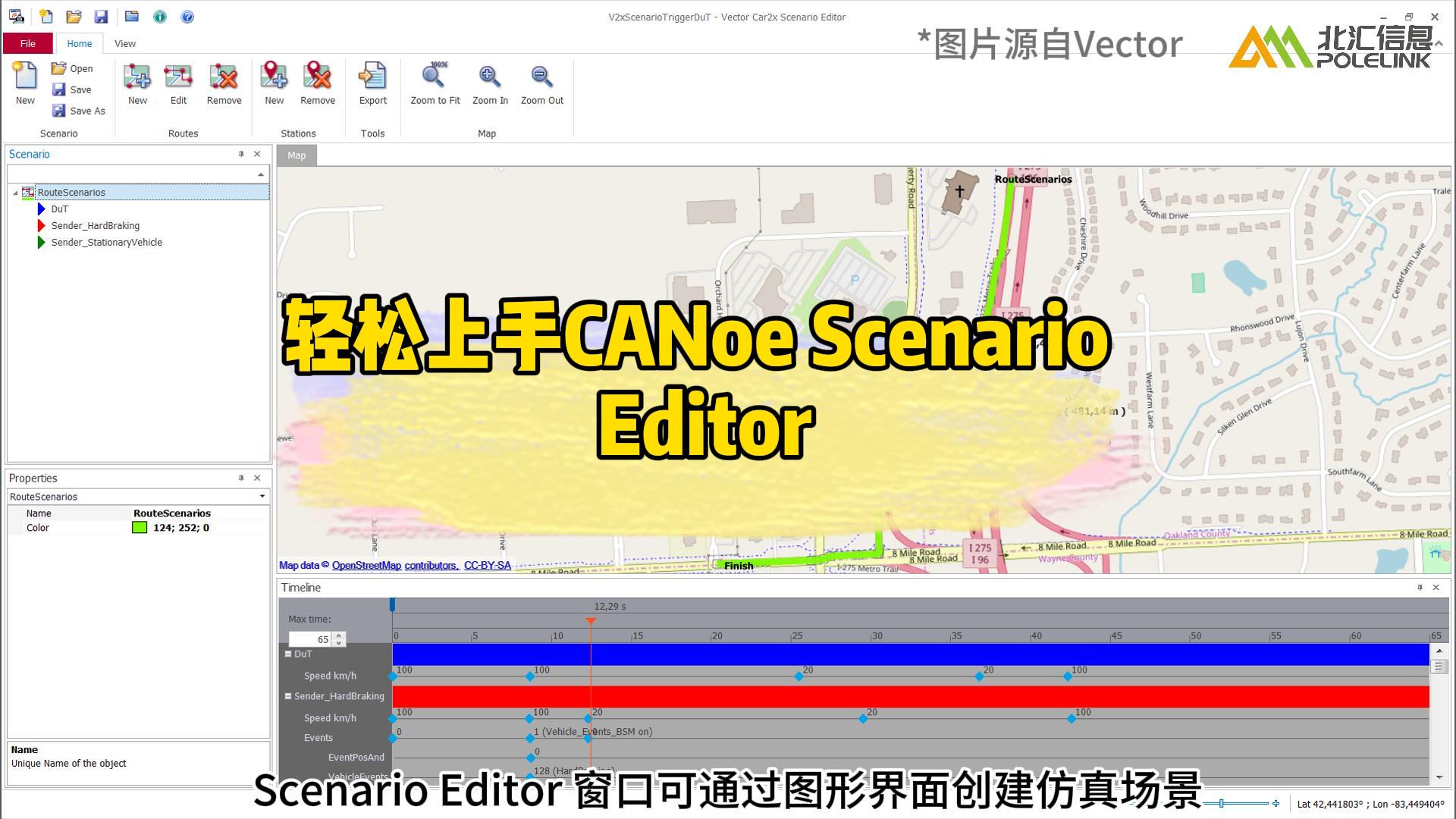
設計仿真 | 基于VTD的V2X仿真應用

FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
未來已來,多傳感器融合感知是自動駕駛破局的關鍵

基于實車在環(ViL)的V2X測試方法

羅德與施瓦茨聯合Autotalks成功驗證第三代V2X芯片組性能
V2X與ETC到底有什么不同?
萬集激光基于車路協同的自動駕駛方案亮相
保護道路弱勢群體,德思特V2X通信方案在行動!

德思特分享丨V2X在做什么?連接未來智能出行的車聯網(下)





 工商網監
工商網監
評論