") 機(jī)器學(xué)習(xí)技術(shù)的理論背景及可用神經(jīng)網(wǎng)絡(luò)類型
機(jī)器學(xué)習(xí)技術(shù)的理論背景及可用神經(jīng)網(wǎng)絡(luò)類型
在這三部分系列的第一部分中,作者調(diào)查了機(jī)器學(xué)習(xí)技術(shù)在高度自動(dòng)化駕駛場(chǎng)景中的驅(qū)動(dòng)因素和潛在應(yīng)用。第二部分定義了機(jī)器學(xué)習(xí)技術(shù)的理論背景,以及汽車開發(fā)人員可用的神經(jīng)網(wǎng)絡(luò)類型。第三部分在功能安全要求的背景下評(píng)估這些選項(xiàng)。
機(jī)器學(xué)習(xí)可以定義為一組有助于基于過去學(xué)習(xí)進(jìn)行預(yù)測(cè)的算法。
在機(jī)器學(xué)習(xí)算法中,輸入數(shù)據(jù)被組織為數(shù)據(jù)點(diǎn)。每個(gè)數(shù)據(jù)點(diǎn)都由描述所表示數(shù)據(jù)的特征組成。例如,大小和速度是可以區(qū)分汽車和街上自行車的特征。汽車的尺寸和速度通常都高于自行車。機(jī)器學(xué)習(xí)方法的目標(biāo)是將輸入數(shù)據(jù)轉(zhuǎn)換為有意義的輸出,例如將輸入數(shù)據(jù)分類為汽車和非汽車數(shù)據(jù)點(diǎn)或?qū)ο蟆]斎胪ǔ懗?vector x,由幾個(gè)數(shù)據(jù)點(diǎn)組成。輸出寫為y。
二維或三維輸入數(shù)據(jù)可以在所謂的特征空間中進(jìn)行說明和查看,其中每個(gè)數(shù)據(jù)點(diǎn)x都相對(duì)于其特征進(jìn)行繪制。圖 8 (a) 顯示了描述汽車和非汽車對(duì)象的二維特征空間的簡(jiǎn)化示例。
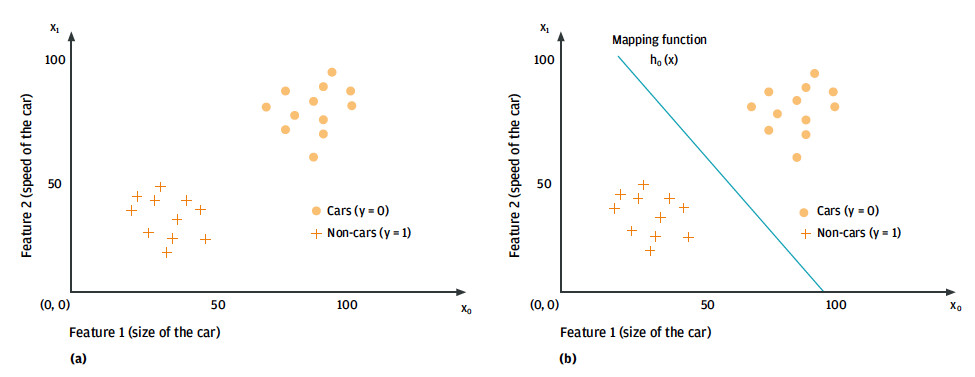
圖 8. 根據(jù)大小和速度對(duì)汽車和非汽車對(duì)象進(jìn)行分類:特征空間 (a) 和兩個(gè)類別之間的相應(yīng)分離 (b)。
所謂的學(xué)習(xí)映射函數(shù) 或model,h_θ (x)給出了特征向量之間的差異(例如,分類為汽車和非汽車數(shù)據(jù)點(diǎn))。模型的結(jié)構(gòu)范圍從簡(jiǎn)單的線性函數(shù),例如圖 8 (a) 中劃分汽車和非汽車對(duì)象的線,到復(fù)雜的非線性神經(jīng)網(wǎng)絡(luò)。學(xué)習(xí)方法的目標(biāo)是確定系數(shù)的值,這些θ-系數(shù)從可用的輸入數(shù)據(jù)中表示模型的參數(shù)。映射函數(shù)的輸出是算法對(duì)輸入數(shù)據(jù)描述的預(yù)測(cè)。
機(jī)器學(xué)習(xí)方法可以根據(jù)映射函數(shù)的學(xué)習(xí)方式進(jìn)行分類(圖 9)。有三種可能:
監(jiān)督學(xué)習(xí)—— 映射函數(shù)是根據(jù)訓(xùn)練數(shù)據(jù)對(duì)計(jì)算的,其中y預(yù)先知道的輸出在訓(xùn)練階段分別提供給學(xué)習(xí)算法。一旦計(jì)算了模型的參數(shù),就可以將模型部署到目標(biāo)應(yīng)用程序中。它的輸出——當(dāng)它接收到一個(gè)未知的數(shù)據(jù)點(diǎn)時(shí)——將是 的預(yù)測(cè)值y。
無監(jiān)督學(xué)習(xí)—— 在這種情況下,與監(jiān)督學(xué)習(xí)相比,在訓(xùn)練階段沒有可用的特征標(biāo)簽對(duì)。學(xué)習(xí)算法的輸入僅包含未標(biāo)記的數(shù)據(jù)點(diǎn)。這種機(jī)器學(xué)習(xí)方法的目標(biāo)是x直接從特征空間中的分布推斷輸入特征的標(biāo)簽。
強(qiáng)化(半監(jiān)督)學(xué)習(xí)—— 在這種情況下,訓(xùn)練數(shù)據(jù)也沒有標(biāo)簽,但模型的構(gòu)建是為了通過一組動(dòng)作促進(jìn)與環(huán)境的交互。映射函數(shù)將環(huán)境狀態(tài)映射到由輸入數(shù)據(jù)給出的動(dòng)作。獎(jiǎng)勵(lì)信號(hào)表示在特定環(huán)境狀態(tài)下執(zhí)行的操作。當(dāng)信號(hào)表示積極影響時(shí),學(xué)習(xí)算法會(huì)加強(qiáng)行動(dòng)。如果識(shí)別出負(fù)面影響,該算法將阻止環(huán)境的特定動(dòng)作或狀態(tài)。
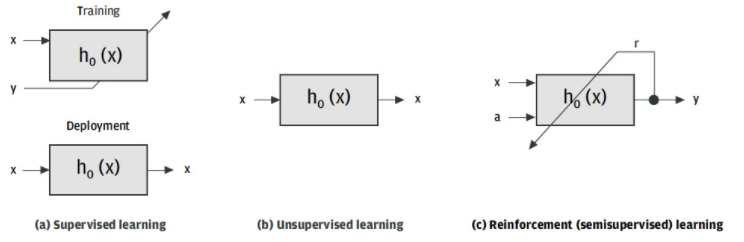
圖 9.基于訓(xùn)練方法的機(jī)器學(xué)習(xí)算法分類。
近年來,所謂的深度學(xué)習(xí)范式徹底改變了機(jī)器學(xué)習(xí)領(lǐng)域。深度學(xué)習(xí)通過解決以前傳統(tǒng)模式識(shí)別方法無法解決的挑戰(zhàn),對(duì)機(jī)器學(xué)習(xí)社區(qū)產(chǎn)生了巨大影響(LeCun 等人,2015 年)。深度學(xué)習(xí)的引入極大地提高了為視覺識(shí)別、對(duì)象檢測(cè)、語音識(shí)別、異常檢測(cè)或基因組學(xué)設(shè)計(jì)的系統(tǒng)的精度。深度學(xué)習(xí)的關(guān)鍵方面是用于解釋數(shù)據(jù)的特征是從訓(xùn)練數(shù)據(jù)中自動(dòng)學(xué)習(xí)的,而不是由工程師手動(dòng)制作的。
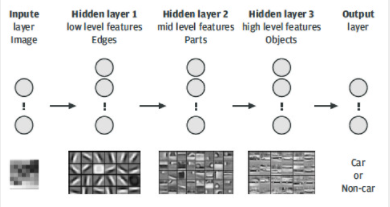
圖 10.訓(xùn)練識(shí)別圖像中汽車的深度卷積神經(jīng)網(wǎng)絡(luò)。
到目前為止,構(gòu)建一個(gè)好的模式識(shí)別算法的主要挑戰(zhàn)是手工設(shè)計(jì)的用于分類的特征向量,例如在第 1 部分中描述的早期版本的交通標(biāo)志識(shí)別系統(tǒng)中使用的局部二進(jìn)制模式。 深度學(xué)習(xí)的出現(xiàn)已經(jīng)用可以自動(dòng)發(fā)現(xiàn)原始輸入數(shù)據(jù)中重要特征的學(xué)習(xí)算法取代了特征向量的手動(dòng)工程。
在架構(gòu)上,深度學(xué)習(xí)系統(tǒng)由多層非線性單元組成,可以將原始輸入數(shù)據(jù)轉(zhuǎn)換為更高層次的抽象。每一層都將前一層的輸出映射成更復(fù)雜的表示,適合回歸或分類任務(wù)。這種學(xué)習(xí)通常在使用反向傳播算法訓(xùn)練的深度神經(jīng)網(wǎng)絡(luò)上進(jìn)行。該算法迭代地調(diào)整網(wǎng)絡(luò)的參數(shù)或權(quán)重,以模擬輸入的訓(xùn)練數(shù)據(jù)。因此,網(wǎng)絡(luò)在訓(xùn)練結(jié)束時(shí)已經(jīng)學(xué)習(xí)了輸入數(shù)據(jù)點(diǎn)的復(fù)雜非線性映射函數(shù)。
圖 10 顯示了一個(gè)深度神經(jīng)網(wǎng)絡(luò)的符號(hào)表示,該網(wǎng)絡(luò)經(jīng)過訓(xùn)練可以識(shí)別圖像中的汽車。輸入層表示原始輸入像素。隱藏層 1 通常模擬圖像的某些位置和方向是否存在邊緣。第二個(gè)隱藏層使用在前一層中計(jì)算的邊緣對(duì)對(duì)象部件進(jìn)行建模。第三個(gè)隱藏層構(gòu)建了建模對(duì)象的抽象表示,在我們的例子中,這就是汽車的成像方式。輸出層根據(jù)第三個(gè)隱藏層的高級(jí)特征計(jì)算給定圖像包含汽車的概率。
不同的網(wǎng)絡(luò)架構(gòu)源于神經(jīng)網(wǎng)絡(luò)的單元和層的分布方式。所謂感知器是最簡(jiǎn)單的,由單個(gè)輸出神經(jīng)元組成。通過建立在感知器上可以獲得大量的神經(jīng)網(wǎng)絡(luò)風(fēng)味。這些網(wǎng)絡(luò)中的每一個(gè)都比其他網(wǎng)絡(luò)更適合特定的應(yīng)用程序。圖 11 顯示了近年來創(chuàng)建的眾多神經(jīng)網(wǎng)絡(luò)架構(gòu)中最常見的三種。
深度前饋神經(jīng)網(wǎng)絡(luò)(圖 11a)是一種結(jié)構(gòu),其中兩個(gè)相鄰層之間的神經(jīng)元完全互連,信息流僅在一個(gè)方向上,從系統(tǒng)的輸入到輸出。這些網(wǎng)絡(luò)可用作通用分類器,并用作所有其他類型的深度神經(jīng)系統(tǒng)的基礎(chǔ)。
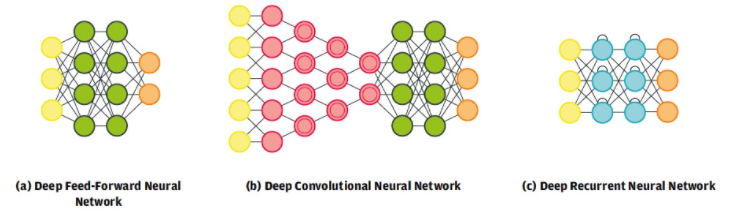
圖 11.深度神經(jīng)網(wǎng)絡(luò)架構(gòu)
深度卷積神經(jīng)網(wǎng)絡(luò)(圖 11b)改變了視覺感知方法的開發(fā)方式。這種網(wǎng)絡(luò)由交替的卷積層和池化層組成,它們通過從輸入數(shù)據(jù)中進(jìn)行泛化來自動(dòng)學(xué)習(xí)對(duì)象特征。這些學(xué)習(xí)到的特征被傳遞到一個(gè)完全互連的前饋網(wǎng)絡(luò)進(jìn)行分類。這種類型的卷積網(wǎng)絡(luò)是圖 10 所示的汽車檢測(cè)架構(gòu)和第1 部分中描述的用例的基礎(chǔ)。
雖然深度卷積網(wǎng)絡(luò)對(duì)視覺識(shí)別至關(guān)重要,但深度遞歸神經(jīng)網(wǎng)絡(luò)(圖 11c)對(duì)于自然語言處理至關(guān)重要。由于隱藏層中神經(jīng)元之間的自遞歸連接,此類架構(gòu)中的信息是時(shí)間相關(guān)的。網(wǎng)絡(luò)的輸出可能會(huì)根據(jù)數(shù)據(jù)輸入網(wǎng)絡(luò)的順序而有所不同。例如,如果在單詞“mouse”之前輸入單詞“cat”,則會(huì)獲得某個(gè)輸出。現(xiàn)在,如果輸入順序改變,輸出順序也可能改變。
機(jī)器學(xué)習(xí)算法的類型
盡管深度神經(jīng)網(wǎng)絡(luò)是復(fù)雜機(jī)器學(xué)習(xí)挑戰(zhàn)中最常用的解決方案之一,但還有各種其他類型的機(jī)器學(xué)習(xí)算法可用。表 1 根據(jù)它們的性質(zhì)(連續(xù)或離散)和訓(xùn)練類型(監(jiān)督或無監(jiān)督)對(duì)它們進(jìn)行分類。
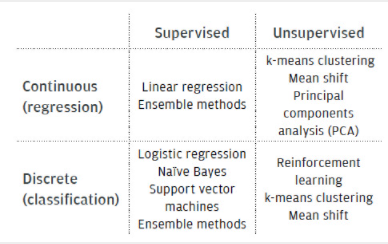
表 1. 機(jī)器學(xué)習(xí)算法的類型
機(jī)器學(xué)習(xí)估計(jì)器可以根據(jù)其輸出值或訓(xùn)練方法進(jìn)行粗略分類。如果后者估計(jì)連續(xù)值函數(shù)(即連續(xù)輸出),則該算法被歸類為回歸估計(jì)器。機(jī)器學(xué)習(xí)算法在其輸出為離散變量時(shí)稱為分類器。第1 部分中描述的交通標(biāo)志檢測(cè)和識(shí)別系統(tǒng)是此類算法的一種實(shí)現(xiàn)。y
? Ry ? {0,1,…,q}
異常檢測(cè)是無監(jiān)督學(xué)習(xí)的一種特殊應(yīng)用。這里的目標(biāo)是識(shí)別數(shù)據(jù)集中的異常值或異常。異常值被定義為與應(yīng)用程序中常見的特征向量相比具有不同屬性的特征向量。換句話說,它們?cè)谔卣骺臻g中占據(jù)不同的位置。
表 1 還列出了一些流行的機(jī)器學(xué)習(xí)算法。這些將在下面簡(jiǎn)要說明。
線性回歸是一種用于將線、平面或超平面擬合到數(shù)據(jù)集的回歸方法。擬合模型是一個(gè)線性函數(shù),可用于對(duì)實(shí)值函數(shù)進(jìn)行預(yù)測(cè)y。
邏輯回歸是線性回歸方法的離散對(duì)應(yīng)物,其中將映射函數(shù)給出的預(yù)測(cè)實(shí)數(shù)值轉(zhuǎn)換為概率輸出,表示輸入數(shù)據(jù)點(diǎn)屬于某個(gè)類別。
樸素貝葉斯分類器是一套建立在貝葉斯定理基礎(chǔ)上的機(jī)器學(xué)習(xí)方法,它假設(shè)每個(gè)特征都獨(dú)立于其他特征。
支持 向量機(jī) (SVM)旨在使用所謂的邊距計(jì)算類之間的分離。邊距被計(jì)算為盡可能寬,以便盡可能清楚地分開類。
集成方法,如決策樹、隨機(jī)森林或AdaBoost組合了 一組基分類器,有時(shí)稱為“弱”學(xué)習(xí)器,目的是獲得“強(qiáng)”分類器。
神經(jīng)網(wǎng)絡(luò)是機(jī)器學(xué)習(xí)算法,其中回歸或分類問題由一組稱為神經(jīng)元的互連單元解決。本質(zhì)上,神經(jīng)網(wǎng)絡(luò)試圖模仿人腦的功能。
k-means 聚類是一種用于將具有共同屬性的特征組合在一起的方法,即它們?cè)谔卣骺臻g中彼此接近。k-means 根據(jù)給定的集群數(shù)量迭代地將共同特征分組到球形集群中。
Mean-shift也是一種數(shù)據(jù)聚類技術(shù),它對(duì)于異常值更通用和穩(wěn)健。與 k-means 不同,mean-shift 只需要一個(gè)調(diào)整參數(shù)(搜索窗口大小),并且不假定數(shù)據(jù)簇的先驗(yàn)形狀為球形。
主成分分析 (PCA)是一種數(shù)據(jù)降維技術(shù),它將一組可能相關(guān)的特征轉(zhuǎn)換為一組稱為主成分的線性不相關(guān)變量。主成分按方差順序排列。第一個(gè)組件具有最高的變化;第二個(gè)在此之下有下一個(gè)變化,依此類推。
第三部分在功能安全要求的背景下評(píng)估這些機(jī)器學(xué)習(xí)算法。
審核編輯:郭婷
-
神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
42文章
4772瀏覽量
100835 -
機(jī)器學(xué)習(xí)
+關(guān)注
關(guān)注
66文章
8421瀏覽量
132710
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
詳解深度學(xué)習(xí)、神經(jīng)網(wǎng)絡(luò)與卷積神經(jīng)網(wǎng)絡(luò)的應(yīng)用

神經(jīng)網(wǎng)絡(luò)教程(李亞非)
labview BP神經(jīng)網(wǎng)絡(luò)的實(shí)現(xiàn)
分享機(jī)器學(xué)習(xí)卷積神經(jīng)網(wǎng)絡(luò)的工作流程和相關(guān)操作
機(jī)器學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)參數(shù)的代價(jià)函數(shù)
基于賽靈思FPGA的卷積神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)設(shè)計(jì)
神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)搜索有什么優(yōu)勢(shì)?
【AI學(xué)習(xí)】第3篇--人工神經(jīng)網(wǎng)絡(luò)
如何用卷積神經(jīng)網(wǎng)絡(luò)方法去解決機(jī)器監(jiān)督學(xué)習(xí)下面的分類問題?
卷積神經(jīng)網(wǎng)絡(luò)模型發(fā)展及應(yīng)用
卷積神經(jīng)網(wǎng)絡(luò)簡(jiǎn)介:什么是機(jī)器學(xué)習(xí)?
什么是模糊神經(jīng)網(wǎng)絡(luò)_模糊神經(jīng)網(wǎng)絡(luò)原理詳解
為什么使用機(jī)器學(xué)習(xí)和神經(jīng)網(wǎng)絡(luò)以及需要了解的八種神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論