 永磁同步電機的控制
永磁同步電機的控制
一、什么是力矩控制
永磁同步電機在汽車上的應用越來越廣泛,從動力驅動到轉向剎車的執行機構,都可以見到其蹤影。今天想談談永磁同步電機的控制。
做控制的人都知道,任何電機的控制,無非三種不同的控制目標:
位置控制:想讓電機轉多少度它就轉多少度
速度控制:想讓電機轉多快它就轉多快
力矩控制:想讓電機出多少力它就出多少力
但無論是哪種控制目標,無非是一個閉環還是兩個閉環還是三個閉環的區別,力矩控制作為最內層的環,是必不可少的。今天就來講講什么是力矩控制?
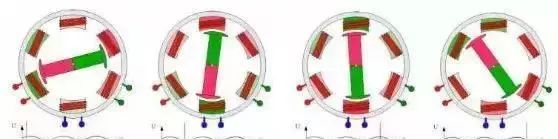
要控制一個電機,首先對被控對象的了解是必須的。讓我們用下面這張動圖來幫助理解永磁同步電機是怎樣運動起來的。定子三相上通過互差120度的交變電壓以后,在定子鐵芯上可以看到產生了旋轉的磁場(動圖中代表磁場方向的紅綠顏色逆時針旋轉),在這個旋轉的磁場作用下,與轉子磁場產生力的作用,帶動轉子旋轉。
電機力矩是如何產生的呢?在前文《電機的力矩、轉速和功率》,我們分析過力矩與電樞(定子)電流成正比;
那么電流是如何產生的呢?我們可以把電機的每一個繞組想象成一個在磁場中旋轉的電阻+電感,如下面的等效電路:
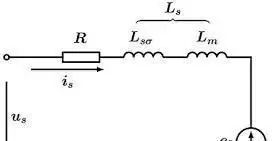
假設電機開環運行,當給定電機定子三相一個互差120度的電壓建立起旋轉磁場以后,如果這個時候沒有負載,電機會飛速的轉動起來(空載),直到反電勢和給定電壓完全相等;此時定子繞組中的電流為仍然為0,可以將定子的旋轉磁場假想(虛擬/等效)成一個繞著電機軸心旋轉的磁鐵,假想出來的這塊磁鐵的南極與轉子磁鐵的北極軸線相重合;
當轉子上有了負載以后,根據牛頓運動定理,電機的轉速必然會有一個減速的過程,這就意味著上述等效電路中的反電勢降低,而在給定電壓不變的情況下,剩下的那些電壓就會在電阻中產生電流了。在那這一段減速的過程當中還發生了什么事情呢?因為被負載拖拽了一下,轉子磁鐵的軸心比虛擬出來的定子磁鐵軸心要之后一個角度了,這個角度就是我們所謂的“功角”。
關于電機的矢量模型,互聯網上可以找到各種各樣的圖,但這些圖要么太抽象,看了半天不知所云,沒法和實物對照起來;要么不夠全面,一張圖里的內容有限,對實際工作指導意義不大。
因此筆者在實際工作過程中,喜歡把大量相關的矢量都揉在一起,見下圖:
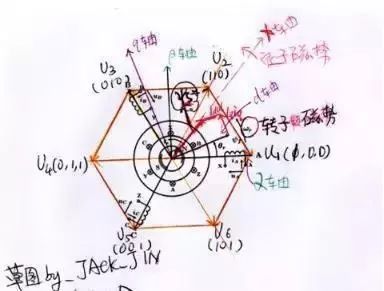
最中間的小圓是轉子(N極和S極),轉子外圍有排列互差120度的AX,BY,CZ三相定子。
靜止兩相坐標軸:α與定子A相重合,β比α超前90度(圖中綠色坐標軸)
旋轉兩相坐標找:d軸與轉子的N極重合,q軸比d軸超前90度(圖中紫色坐標軸)
X軸:定子旋轉磁動勢ψs,可分解為轉子磁動勢ψf,id*Lq和Iq*Ld(圖中紅色向量)
電壓矢量:三相全橋的開關組合可以表示的電壓在空間的表現形式(黃色箭頭)
說一千,道一萬,所謂的電機的力矩控制,就是通過一定的控制算法,去尋找一些開關管的組合(圖中黃色部分)來合成一個給電機定子的給定電壓(圖中的大紅色箭頭),這個電壓抵消掉反電勢后產生的電流所對應的力矩剛好與外部負載平衡。
二、FOC與DTC
電機的力矩控制當前存在的兩個主要流派是磁場定向控制FOC和直接轉矩控制DTC,當然這兩種控制的算法從原理上說對所有的交流電機都適用,本文只是講講他們用于永磁同步電機控制的異同。
FOC
FOC控制理論最初于上世紀70年代由西門子的工程師提出。在上文中我們提到過可以把定子所產生的磁場虛擬成一個繞轉子高速旋轉磁鐵。
定子磁勢可分解為d軸磁勢和q軸磁勢,d軸磁勢與轉子磁勢同軸,不能產生切向的力矩,但會影響永磁同步電機轉子永磁體所產生的磁場;q軸與轉子磁勢相差90度,因而產生切向的力矩(類似兩根垂直的條形磁鐵所產生的相互作用力)。
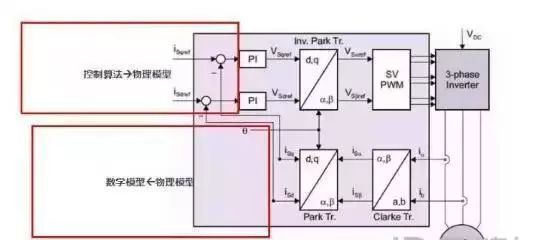
FOC的控制的基本思路就是將三相靜止ABC坐標系下的相關變量轉換到旋轉坐標系下(d,q)進行數學運算,controller改變d軸和q軸的電壓達到控制d軸和q軸電流的目的。然而最終給電機三相的只能是靜止坐標系下的電壓,因此在控制算法中需要再次把dq軸的電壓轉換成ABC三相電壓給驅動橋。即存在一個從物理模型à數學模型à控制算法à物理模型的過程。
要實現FOC,下列輸入必不可少:
1.電機三相電流(可采用如上圖所示的的兩個電流傳感器,也可以采用一個低邊或高邊的母線電流傳感器,用分時采樣電流重構的方法還原出三相電流)
2.電機的位置信號缺一不可
下列控制模塊必不可少:
1.Clark-Park變換
2.d軸和q軸的PI調節
3.反Clark-Park變換
4.SPWM/SVPWM(當然是用SVPWM)
下圖給出了具體的控制過程。
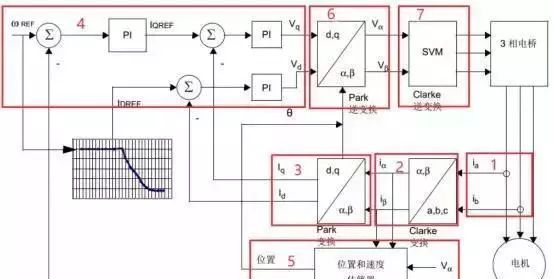
過程如下:
1、測量3相定子電流。這些測量可得到ia和ib的值,可以通過以下公式計算出ic:
ia+ib+ic=0
2、將3相電流變換至2軸系統。該變換將得到變量iα和iβ,它們是由測得的ia和ib以及計算出的ic值變換而來的。從定子角度來看,iα和iβ是相互正交的時變電流值。
3、按照控制環上一次迭代計算出的變換角,來旋轉2軸系統使之與轉子磁通對齊。iα和iβ變量經過該變換可得到Id和Iq。Id和Iq為變換到旋轉坐標系下的正交電流。在穩態條件下,Id和Iq是常量。
4、誤差信號由Id、Iq的實際值和各自的參考值進行比較而獲得。
· Id的參考值控制轉子磁通
· Iq的參考值控制電機的轉矩輸出
· 誤差信號是到PI控制器的輸入
· 控制器的輸出為Vd和Vq,即要施加到電機上的電壓矢量
5、估算出新的變換角,其中Vα、Vβ、iα和iβ是輸入參數。新的角度可告知FOC算法下一個電壓矢量在何處。
6、通過使用新的角度,可將PI控制器的Vd和Vq輸出值逆變到靜止參考坐標系。該計算將產生下一個正交電壓值Vα和Vβ。
7、Vα和Vβ值經過逆變換得到3相值Va、Vb和Vc。該3相電壓值可用來計算新的PWM占空比值,以生成所期望的電壓矢量。
DTC:
DTC的出現比FOC晚了十多年,是上世紀80年代中期由德國學者Depenbrock教授提出。其基本思路是不再將定子側的相關變量折算到轉子的旋轉坐標系下,放棄了矢量控制中電流解耦的控制思想 ,去掉了PI調節模塊、反Clark-Park變換和SVPWM模塊 ,轉而通過檢測母線電壓和定子電流 ,直接計算出電機的磁鏈和轉矩 ,并利用兩個滯環比較器直接實現對定子磁鏈和轉矩的解耦控制。
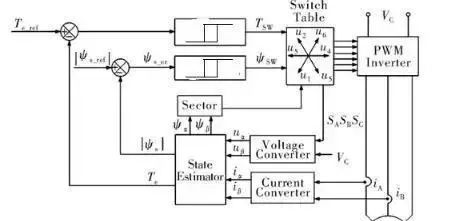
從上框圖我們可看到,控制算法首先根據電機的線電流和相電壓,得到在靜止兩相坐標軸下的電壓和電流 Uα 、Uβ、 Iα、 Iβ。然后根據這四個量,對定子的磁通和力矩進行估計,怎么個估計法呢?可以用如下兩個公式(不需要電機角度信號):
同時,還要根據電機定子的電壓和電流來估算當前轉子的位置所在的區間。
當然如果擔心軟件中積分運算有累計誤差導致不準確,或者轉子磁通的值不準確,或者功率角的值不準確,也可以在系統中加入角度傳感器,將相關參數都放到旋轉坐標dq軸坐標系下后去計算。
計算得到定子磁通和扭矩值以后,與其參考值做比較并經過滯緩比較器以后,得到兩個非零即1的狀態量,表征當前磁和力與參考值的關系其關系如下。

1.針對當前的力矩和磁場,不考慮到底磁場和力矩輸出與參考值相差多少,只考慮他們是“欠”還是“過”
2.在控制策略中,不考慮每一次運行的時候都給一個準確的電壓矢量,而是在每個運行周期內給出一個V1-V6其中之一(因此沒有占空比這個概念存在了)
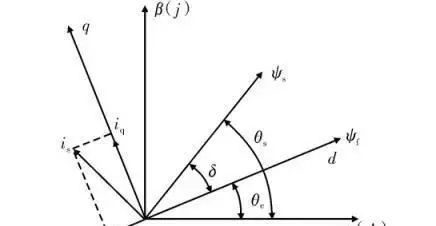
接下來的問題是怎樣選擇V1還是V6呢?還是先回到D-Q軸坐標系的這張圖(雖然在控制中算法中不會用到),稍作思考即可想明白如果施加的電壓向量與d軸在正負90度之內就會導致磁通增加;施加的電壓向量與q軸在正負90度之內就會導致扭矩增加。
可以用下面極坐標系的四個象限來表示其關系:
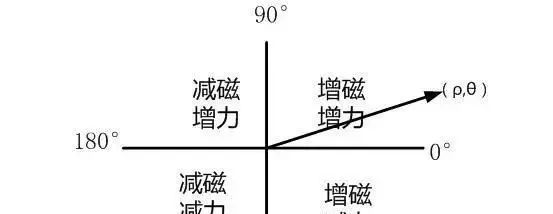
那么,我們就可以根據當前轉子位置值,按以下開關表給電機驅動橋指令:
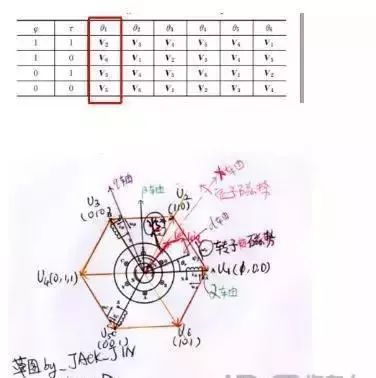
結合以上兩圖,以電機在第一扇區為例,
1.如果電機欠磁欠力(1 1),給定U2,則給定電壓與電機當前位置的電壓夾角介于[0° 60°]之間,實現增磁增力;
2.如果電機欠磁過力(1 0),給定U6,則給定電壓與電機當前位置的電壓夾角介于[-60° 0°]之間,實現增磁增力
3.如果電機過磁欠力(0 1),給定U3,則給定電壓與電機當前位置夾角介于[60° 120°]之間,電機會增力,但磁的狀況不單調,但是隨著多個循環的調整,磁最終也能與給定平衡(這個是沒有辦法的事情,6個電壓矢量把空間分成了6個區間;而增減關系是4個區間,必然有重疊)
4.如果電機過磁過力(0 0),給定U5,則給定電壓與電機當前位置夾角介于[180° 240°]之間,電機減磁減力
其余區間類推,最終形成的定子磁鏈如下圖所示:

綜上,可對兩種控制算法小結如下:

三、關于電機位置信號
電機位置信號的重要性
在永磁同步電機FOC控制算法中,需要用到一個非常重要的物理量是電機的位置信號。
這個位置信號到底有多重要呢?還是用數據來說話吧。筆者搭建了一個電機的電流環仿真模型,固定電機轉速的情況下,給定電機3.2Nm的控制指令,
分三種工況進行仿真:
工況1:轉子信號正常(下圖綠線)
工況2:轉子信號上疊加30度的偏置(下圖藍線)
工況3:轉子信號上疊加±7度的高斯隨機白噪聲(下圖紅線)
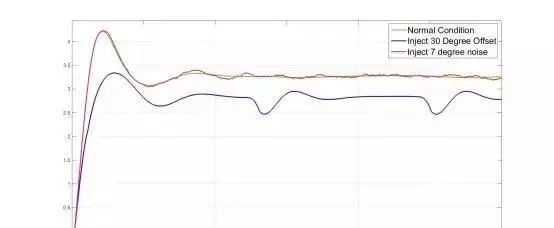
從仿真結果來看,工況2電機輸出力矩不足且存在與轉子位置相關的固有波動;工況3存在一定程度的扭矩紋波。由此,該信號的重要性可見一斑。
電機位置信號的種類
目前在汽車領域的電機里用得比較多的電機位置信號傳感器有兩種類型:
(1) 內外磁環+Hall芯片
這種方案會在電機端部與轉子同軸處安裝一磁環板,板上充有內磁環和外傳兩部分,同時在磁環附近安裝有一PCB,PCB上安裝有三個單線性hall芯片輸出Hall_A,B,C信號和一個雙線性Hall芯片輸出Hall_Q1,Q2信號。
內磁環上分布與電機極對數相等均勻分布的N-S磁極,分別依次以120度相位差被三個單hall芯片感應。因而,對這三片hall芯片在PCB版上的排列要求就是這三個芯片應該在【0 360/極對數】范圍內均勻分布。
外磁環上分布了若干N-S磁極(比較典型的數字是72,80),隨著轉子的轉動N_S磁極每經過雙Hall芯片下方一次,芯片感應輸出一組正交90度變化的HallQ1_Q2信號。

比較典型的Hall信號與電機反電勢的關系見下圖:
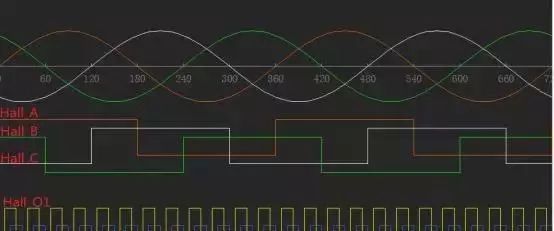
一般來說用五路信號足以得到電機絕對位置,并且他們之間具備相互冗余校驗的功能。但是在一些要求比較高的場合,可能會用到7路hall信號。
(2) 旋轉變壓器
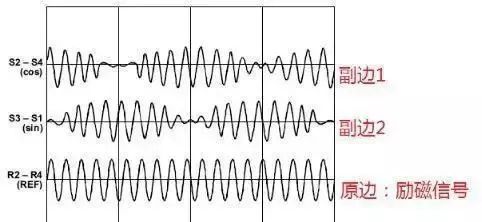
旋轉變壓器的定子繞組作為變壓器的原邊,接受勵磁電壓;轉子繞組作為變壓器的副邊,通過電磁耦合得到感應電壓。其工作原理和普通變壓器基本相似,區別在于普通變壓器的原邊、副邊繞組是相對固定的,所以輸出電壓和輸入電壓之比是常數,而旋轉變壓器的原邊、副邊繞組則隨轉子的角位移發生相對位置的改變,因而其輸出電壓的大小隨轉子角位移而發生變化。

其典型的信號特征如下:
除此之外,近些年來磁阻型的位置信號傳感風頭正勁,大有搶班奪權之勢。
電機位置信號的應用
Hall信號的一般經過一個簡單的整形電路以后直接接入單片機的比較捕捉單元就可以被單片機進行解碼,某些單片機甚至有專門的Hall信號正交編碼單元由硬件實現對HallQ信號的解碼;而旋變信號則需要專用的解碼芯片(該專用解碼芯片一般來說是指RDC resolver芯片,現在做的最好的就是美國的ADI和日本多摩川兩家,但也不絕對,比如某日本廠商采用的就是一片運算單元功能強大但外設很少的MCU)。
審核編輯 :李倩
-
傳感器
+關注
關注
2550文章
51046瀏覽量
753119 -
芯片
+關注
關注
455文章
50732瀏覽量
423247 -
電機
+關注
關注
142文章
9003瀏覽量
145349
原文標題:永磁同步電機的FOC/ DTC,你能弄明白嗎?
文章出處:【微信號:motorcontrol365,微信公眾號:電機控制設計加油站】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
永磁同步電機應用領域 永磁同步電機的優缺點
新能源叉車電機控制解決方案:芯海科技CS32F103高性能MCU的應用與優勢







 工商網監
工商網監
評論