 分解自動駕駛傳感器 車載攝像頭 毫米波雷達 激光雷達 超聲波雷達
分解自動駕駛傳感器 車載攝像頭 毫米波雷達 激光雷達 超聲波雷達
隨著汽車電動化、智能化、網聯化、共享化發展,自動駕駛的雛形也逐漸出現,雖然自動駕駛汽車還未完全商用化,但很多車企已經開始布局L3甚至L4級別的自動駕駛汽車。美國國家公路交通安全管理局(NHTSA)根據駕駛行為中車輛占據的控制權,將自動駕駛分為六個等級(表1),其中L0級即無自動,駕駛員需要隨時掌握車輛的所有機械、物理功能,車輛僅配備警報裝置,在車輛行駛過程中給駕駛員提供安全警示,車輛不參與任何駕駛行為過程;L1級是由駕駛員操作車輛,但車輛可以配備諸如車輛防抱死系統等可以幫助行車安全的功能,這些功能僅輔助行車安全,車輛的控制權依舊掌握在駕駛員手中;L2級還是由駕駛員操作車輛,車輛配備的定速巡航系統,盲點檢測系統等功能可以減輕駕駛員操作負擔;L3級是在部分駕駛場景中,車輛已經可以自主控制,無需駕駛員的參與,但當車輛偵測到需要駕駛員控制車輛的路況時,會讓駕駛員立刻進行后續的監管;L4級是車輛可以在有條件的情況下完整的完成自動駕駛,一般無需駕駛員的介入,此時車輛可以按照設定的程序將乘客送到目的地,但是在嚴苛的氣候或者道路模糊不清、意外、不具備自動駕駛條件的道路環境時,車輛會提醒駕駛員,并給駕駛員足夠寬裕的時間進行接管,在L4級時駕駛員仍需要監管車輛的運作;L5級自動駕駛時駕駛員無需在駕駛室,車輛也無需駕駛員監控,可以獨立自主在所有道路環境下完成自動駕駛行為,車輛可以對目標點進行最優的道路規劃和決策。
|
自動駕駛分級 |
名稱 |
定義 |
駕駛操作 |
周邊監控 |
接管 |
應用場景 |
|
L0 |
人工駕駛 |
由人類駕駛員全權駕駛車輛 |
人類駕駛員 |
人類駕駛員 |
人類駕駛員 |
無 |
|
L1 |
輔助駕駛 |
車輛對方向盤和加減速中的一項操作提供駕駛,人類駕駛員負責其余的駕駛動作 |
人類駕駛員和車輛 |
人類駕駛員 |
人類駕駛員 |
限定場景 |
|
L2 |
部分自動駕駛 |
車輛對方向盤和加減速中的多項操作提供駕駛,人類駕駛員負責其余的駕駛動作 |
車輛 |
人類駕駛員 |
人類駕駛員 |
|
|
L3 |
條件自動駕駛 |
由車輛完成絕大部分駕駛操作,人類駕駛員需保持注意力集中以備不時之需 |
車輛 |
車輛 |
人類駕駛員 |
|
|
L4 |
高度自動駕駛 |
由車輛完成所有駕駛操作,人類駕駛員無需保持注意力集中,但限定道路和環境條件 |
車輛 |
車輛 |
車輛 |
|
|
L5 |
完全自動駕駛 |
由車輛完成所有駕駛操作,人類駕駛員無需保持注意力集中 |
車輛 |
車輛 |
車輛 |
所有場景 |
自動駕駛的本質是車輛可以自主完成駕駛行為,這個過程是需要車輛作為載體,是一個硬件與軟件加以輔助的強耦合的系統工程。自動駕駛汽車和人一樣,在路面行駛時是一個感知、規劃、控制、執行的行為,這些過程離不開硬件與軟件協同,如果說軟件是自動駕駛汽車的大腦,起著規劃和控制的行為,那么硬件就是自動駕駛汽車的神經與四肢,起著感知和執行的動作。
執行是車輛根據軟件規劃做出諸如加速、減速、停車等行為,這一環節是由車輛來完成所需步驟,而感知是信息接收的一個過程,是車輛實現自動駕駛動作的源頭,為軟件的規劃和控制提供所需的道路信息,這一環節更像是車的眼睛,查看周圍的環境數據,進行靜態、動態物體識別、偵測與追蹤等,可以讓自動駕駛車輛與駕駛員快速察覺可能發生的危險,以提高行駛過程中的主動安全性,這一過程需要很多的傳感器協作完成。自動駕駛感知主要由車載攝像頭、毫米波雷達、激光雷達、超聲波雷達等傳感器構成,不同的傳感器起著不同的作用,在自動駕駛過程中完成不同的任務需求。
車載攝像頭
車載攝像頭是實現眾多預警、識別類高級輔助駕駛功能的基礎,對于駕駛員來說也更為直觀,類似車道偏離預警、前向碰撞預警、交通標識識別、車道保持輔助、行人碰撞預警、全景泊車、駕駛員疲勞預警等高級輔助駕駛功能,都需要車載攝像頭的輔助來實現。
車載攝像頭的主要硬件包括光學鏡頭、圖像傳感器、圖像信號處理器ISP、串行器、連接器等,光學鏡頭中包含光學鏡片、濾光片和保護膜等。光學鏡片負責聚焦光線,將視野中的物體投射到成像介質表面,根據成像效果的要求不同,可能要求多層光學鏡片,濾光片可以將人眼看不到的光波段進行濾除,只留下人眼視野范圍內的實際景物的可見光波段。圖像傳感器可以利用光電器件的光電轉換功能將感光面上的光像轉換為與光像成相應比例關系的電信號,主要分為CCD和CMOS兩種。ISP圖像處理器主要使用硬件結構完成圖像傳感器輸入的圖像視頻源RAW格式數據的前處理,可轉換為YCbCr等格式,還可以完成圖像縮放、自動曝光、自動白平衡、自動聚焦等多種工作。串行器將處理后的圖像數據進行傳輸,可用于傳輸RGB、YUV等多種圖像數據種類。連接器主要用于連接固定攝像頭。
車載攝像頭在制造工藝及可靠性要求方面也高于工業攝像頭和商用攝像頭,汽車的工作環境多變,有時還會在惡劣環境中工作,為了應對高、低溫環境;強振動;高濕熱等復雜工況下穩定工作,車載攝像頭根據安裝位置不同可分為前視攝像頭、環視攝像頭、后視攝像頭、側式攝像頭及內視攝像頭5類。
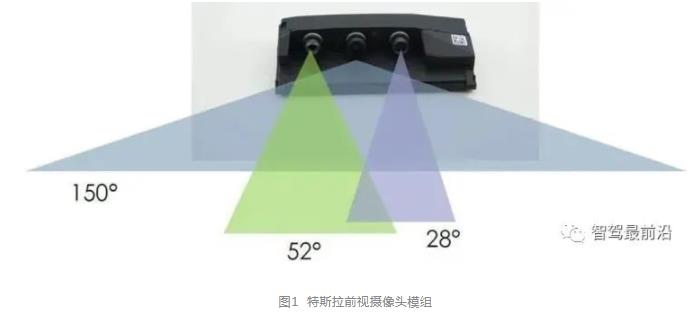
前視攝像頭使用頻率最高,單一攝像頭可實現多重功能,通過算法開發優化,單一前視攝像頭可以實現行車記錄、車道偏離預警、向前碰撞預警、行人識別、交通標識識別等多重功能。前視攝像頭主要安裝在前擋風玻璃上,用于實現車輛行駛過程中視覺感知及識別功能,更具功能不同,前視攝像頭可以分為前視主攝像頭、前視窄角攝像頭和前視廣角攝像頭(圖1),前視主攝像頭在L2級別的高級輔助駕駛系統中作為主攝像頭使用,前視廣角攝像頭的作用主要是用來識別距離較近的物體,用于城市道路工況、低速行駛等場景,前視窄角攝像頭主要作用是進行紅綠燈、行人等目標的識別。前視攝像頭的類型主要包括單目和雙目,其中雙目前視攝像頭擁有更好的測距功能,但需要裝在兩個位置。
環視攝像頭主要是廣角鏡頭,安裝在車輛四周,用來進行圖像拼接實現全景圖,加入算法即可實現道路感知,環視攝像頭可以分為前向魚眼攝像頭、左側魚眼攝像頭、右側魚眼攝像頭、后向魚眼攝像頭。后視攝像頭主要是廣角或魚眼鏡頭,主要用來輔助泊車功能。由于后視鏡的范圍有限,會導致車輛在行駛時給駕駛員造成視野盲區,因為盲區的存在,給行車安全造成了巨大的隱患,側視攝像頭將成為替代后視鏡最好的設備,加裝側式攝像頭后,可以覆蓋盲區,當有物體進入盲區后會給駕駛員進行提醒,實現了盲區檢測功能。內視攝像頭就是在車內加裝攝像頭,用來監控駕駛員行駛狀態,如果發現駕駛員行駛時出現疲勞表情或出現不利于安全駕駛的行為,可以及時掌握信息并進行提醒。特斯拉作為純視覺自動駕駛的狂熱分子,就在車身搭載了8個車載攝像頭,搭配Autopilot系統,實現自動駕駛功能,由于車載攝像頭無法探測深度,因此僅使用純視覺自動駕駛方案的特斯拉,在出現鬼探頭的路況時,很難及時做出反應。
毫米波雷達
毫米波雷達是指波長在1 mm至10 mm之間的電磁波,毫米波的波長介于厘米波和光波之間,因此毫米波兼有微博制導和光電制導的優點,毫米波雷達相對于厘米波雷達,具有體積小,易集成和空間分辨率高的特點,毫米波雷達可以全天候工作,在極端天氣及夜晚也可以發揮作用,毫米波雷達測距也比較遠,但是分辨率低、難以成像且無法識別圖像。
毫米波雷達相對技術比較成熟,在高級輔助駕駛功能上使用比較普及,是感知環節中重要的一環,但是分辨率較低,不能作為激光雷達的替代品,目前汽車毫米波雷達的分辨率分為24 GHz、77 GHz和79 GHz三種頻段,24 GHz又稱為短波雷達,感測距離從0.15公尺至約30公尺左右,主要用來作為停車輔助;77 GHz感測距離從1公尺至約100公尺左右,主要用來盲點檢測;79 GHz感測范圍可以達到250公尺,主要運用在主動巡航系統和汽車前向碰撞報警系統,可以讓車主有足夠時間來剎車或者閃避。
4D高精成像毫米波雷達的提出增加了雷達對目標俯仰高度數據的探測和解析,可以實現俯仰角、時間、距離、方位角的信息感知,4D高精成像毫米波增加時間維度信息后可以有效地解析目標的行為、大小輪廓及類別等數據。4D高精成像毫米波雷達通過增加虛擬通道,大幅提升分辨率以及目標檢測的置信度和檢測范圍(如距離和FOV),同時進化出激光雷達一樣的高密度點云,可帶來豐富的感知增強應用。
在識別較小的物體,對遮擋物體、靜止物體和橫向移動障礙物的檢測,以及應用更多的復雜路況時,4D高精成像毫米波雷達對視覺和激光雷達提供不能獲取的更有價值的路況信息,從而提高系統融合后的安全性。
4D高精成像毫米波雷達在現有雷達優點的基礎上,通過四個維度感知環境,提供比傳統毫米波雷達更豐富的數據;4D高精成像毫米波雷達進入大規模量產后,成本僅是激光雷達的1/10。因此4D高精成像雷達會成為自動駕駛核心傳感器,代替低端激光雷達,并會在未來的自動駕駛方案中占據主導地位,實現低成本,高性能可大規模的量產自動駕駛方案。
激光雷達
激光雷達,也稱為光學雷達,是激光探測與測距系統的簡稱,它通過測定傳感器發射器與目標物體之間的傳播距離,分析目標物體表面的反射能量大小、反射波譜的幅度、頻率和相位信息等,從而呈現出目標物精確的三維結構信息。激光雷達住喲啊應用于測距、定位及地表物體的三維繪制,目前在自動駕駛領域和無人飛行領域得到廣泛的應用。
激光雷達作為軍轉民的高進度雷達技術,具有優良的性能,可以獲得極高的角度、距離和速度分辨率,通常激光雷達的角分辨率不低于0.1mard也就是說可以分辨3km距離上相距0.3m的兩個目標,并可同時跟蹤多個目標;距離分辨率可達0.1m;速度分辨率能達到10m/s以內。如此高的距離、速度分辨率意味著激光雷達可以利用多普勒成像技術獲得非常清晰的圖像。激光雷達是直線傳播,方向性好,光束非常窄,彌散性非常低,因此激光雷達具有較高的精度,與微波、毫米波雷達不同的是,自然界中可以對激光雷達產生干擾的信號源并不多,因此激光雷達的抗干擾能力特別強。大多數的激光雷達系統是由激光器、光學掃描器、光電檢測器、導航系統4個部分構成。
根據作用不同,激光雷達可以分為一維激光雷達、二維激光雷達、三維激光雷達等,一維激光雷達主要用于測距測速、二維激光雷達主要用于輪廓測量、物體識別、區域監控等,三維激光雷達可以實現空間的三維建模,在自動駕駛汽車車頂安裝的激光雷達是三維激光雷達,通過高速的旋轉,可以獲得車輛周圍空間的點云數據,從而繪制出車輛周圍的三維空間地圖,且激光雷達還可以測出周圍車輛、行人的距離、速度、加速度、角速度等信息,再結合GPS地圖計算出周圍車輛、行人的位置信息,以供自動駕駛汽車做出駕駛判斷。
超聲波雷達
超聲波雷達是利用超聲波發生器產生的超聲波,再由接收探頭接收經障礙物反射回來的超聲波,根據超聲波反射接收的時間差計算與障礙物之間的距離。超聲波傳感器成本較低,探測距離近且精度較高,不受光線條件的影響,在防水、防塵、即使有少量泥沙遮擋的環境下都不受影響,因此多用在泊車系統中。
但超聲波雷達在速度較高的情況下測量距離具有一定的局限性,因為超聲波雷達受天氣影響較大,在不同的天氣情況下,超聲波的傳輸速度不同,當傳輸速度較慢且車速較高時,超聲波的測距無法跟上汽車速度的變化,就會造成較大的誤差。由于超聲波散射角度大,因此方向性較差,在測量較遠距離時,回波信號會大幅減弱,影響測量的精度。
超聲波發生器常用的工作頻率有40 kHz、48 kHz和58 kHz三種,一般來說,頻率越高,靈敏度就會越高,但是水平與垂直方向的探測角度就會越小,一般采用40 kHz的工作頻率,常見的超聲波雷達有兩種。第一種是安裝在汽車前后保險杠上的,也就是用于測量汽車前后障礙物的倒車雷達,這種雷達業內稱為UPA;第二種是安裝在汽車側面的,用于測量側方障礙物距離的超聲波雷達,業內稱為APA。目前大多數汽車使用的是倒車雷達UPA,隨著自動駕駛技術的不斷提升,基于超聲波雷達的自動泊車功能逐漸進入大眾視野,APA市場會逐漸打開。
自動駕駛的商用化離不開傳感器的應用,作為汽車的“眼睛”,道路數據的搜集和探測是十分重要的,隨著技術的不斷發展,成本的不斷降低,在中、低型汽車上也將搭配更多的高級輔助駕駛功能,屆時傳感器的使用也會更為普及。
-
傳感器
+關注
關注
2551文章
51212瀏覽量
754539 -
激光雷達
+關注
關注
968文章
3987瀏覽量
190066 -
自動駕駛
+關注
關注
784文章
13853瀏覽量
166582 -
毫米波雷達
+關注
關注
107文章
1048瀏覽量
64418 -
超聲波雷達
+關注
關注
1文章
72瀏覽量
4284
發布評論請先 登錄
相關推薦
毫米波雷達與超聲波雷達的區別是什么
激光雷達與毫米波雷達的優缺點是什么
超聲波雷達在2024 款極氪 X 智能駕駛輔助中扮演什么角色?


又是12個超聲波雷達?揭秘2024款小鵬G9智能駕駛的“2+5+12+7+4”硬件配置邏輯

除了“上車”,毫米波雷達還可以有很多選擇



自研自動駕駛芯片競賽,索喜成為關鍵合作伙伴






 工商網監
工商網監
評論