 CAN總線上的電壓測量方式
CAN總線上的電壓測量方式
在測試儀上切換到測量系統 -》萬用表
測量功能:電阻
測量范圍:自動
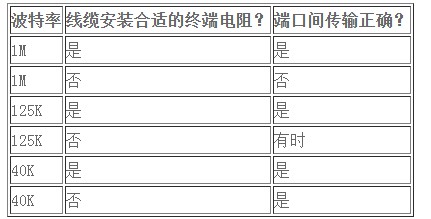
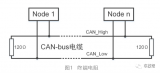
為了避免信號反射,在兩個 CAN 總線上連接阻值各為 120 ? 的電阻 (在 PT-CAN 網絡中的距離最遠)。這兩個終端電阻為相互并聯,并構成一個 60 ? 的替代電阻。在斷開電源電壓后,可以在通信線之間對該替代電阻進行測量。此外,單個電阻可以各自分開測量。(測量 60 ? 等效電阻的竅門:將一個容易觸及的控制單元從總線上拆下,然后測量插頭上 CAN Low (低速) 和 CAN High (高速) 間的電阻)
直流電壓測量 PT-CAN、F-CAN、本地 CAN
檢測的前提:蓄電池已連接且點火開關打開!
在測試儀上切換到測量系統 -》萬用表
測量功能:電壓
測量方式:=
測量范圍:自動
為了確定 CAN Low (低速) 或 CAN High (高速) 導線是否損壞,可以測量 CAN Low (低速) (或者 CAN High (高速)) 的對地電壓。
CAN Low (低速) 對地:電壓大約 2.4 V
CAN High (高速) 對地:電壓大約 2.6 V
這些值是近似值,根據總線負載可以有約幾個 100 mV 的偏差。
示波器測量 PT-CAN、F-CAN、本地 CAN
檢測的前提:蓄電池已連接且點火開關打開!
在測試儀上切換到測量系統 -》示波器設置
測量方式:=
測量范圍:+/- 5 V
頻率范圍:1 kHz
為了弄清 CAN 總線是否完好工作,監測總線上的通信情況十分有用。在此重要的不是分析各個字節的情況,而是只要觀察 CAN 總線的工作情況。示波器測量說明:”CAN 總線很可能無故障工作”。
如果用示波器測量 CAN Low (低速) 和接地導線間的電壓,然后在電壓極限 U (最小) = 1.5 V 和 U (最大) = 2.5 V 時得到一個近似矩形的信號。
如果用示波器測量 CAN High (高速) 和接地導線間的電壓,然后在電壓極限 U (最小) = 2.5 V 和 U (最大) = 3.5 V 時得到一個近似矩形的信號。
這些值是近似值,根據總線負載可以有約幾個 100 mV 的偏差。
K-CAN 的電阻測量
因為根據控制單元內部電路邏輯電阻是變化的,在 K-CAN 總線上可以進行未定義的電阻測量!
K-CAN 的直流電壓測量
檢測的前提:蓄電池已連接且點火開關打開!
在測試儀上切換到測量系統 -》萬用表
測量功能:電壓
測量方式:=
測量范圍:+/- 10 V
為了確定 CAN Low (低速) 或 CAN High (高速) 導線是否損壞,可以測量 CAN Low (低速) (或者 CAN High (高速)) 的對地電壓。
CAN Low (低速) 對地:電壓大約 4.8 V
CAN High (高速) 對地:電壓大約 0.2 V
這些值是近似值,根據總線負載可以有約幾個 100 mV 的偏差。
K-CAN 的示波器測量
檢測的前提:蓄電池已連接且點火開關打開!
在測試儀上切換到測量系統 -》示波器設置
測量方式:=
測量范圍:自動
頻率范圍:1 kHz
為了弄清 CAN 總線是否完好工作,監測總線上的通信情況十分有用。在此重要的不是分析各個字節的情況,而是只要觀察 CAN 總線的工作情況。示波器測量說明:”CAN 總線很可能無故障工作”。
如果用示波器測量 CAN Low (低速) 和接地導線間的電壓,然后在電壓極限 U (最小) = 1 V 和 U (最大) = 5 V 時得到一個近似矩形的信號。
如果用示波器測量 CAN High (高速) 和接地導線間的電壓,然后在電壓極限 U (最小) = 0 V 和 U (最大) = 4 V 時得到一個近似矩形的信號。
這些值是近似值,根據總線負載可以有約幾個 100 mV 的偏差。
CAN 總線失效
K-CAN 數據總線或 PT-CAN 數據總線失效原因可能是 CAN (低速) 或 CAN (高速) 導線短路,或某個控制單元損壞。為了查找故障原因,應進行下列工作步驟:
將 CAN 總線用戶一個一個依次拔出,直至找到故障原因 (= 控制單元 x)。
檢查控制單元 x 導線是否短路
如有必要檢測控制單元 x
如果某個控制單元至 CAN 總線的分支線短路,僅執行該工作步驟就成功了。如果 CAN 總線導線自身短路,則必須檢查電線束。
-
示波器
+關注
關注
113文章
6262瀏覽量
185255 -
CAN
+關注
關注
57文章
2756瀏覽量
463879
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論