 單片機的通信協議該如何設計
單片機的通信協議該如何設計
通信設計中考慮協議的靈活性,經常把協議設計成“不定長度”。
一個實例如下圖:銳米LoRa終端的通信協議幀。
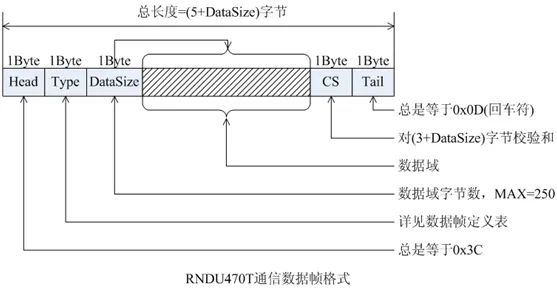
如果一個系統接收上述“不定長度”的協議幀,將會有一個挑戰--如何高效接收與解析。
為簡化系統設計,我們強烈建議您采用“狀態機”來解析UART數據幀,并且把解析工作放在ISR(中斷服務程序)完成,僅當接收到最后一個字節(0x0D)時,再將整個數據幀提交給進程處理。
該解析狀態機的原理如下圖所示:
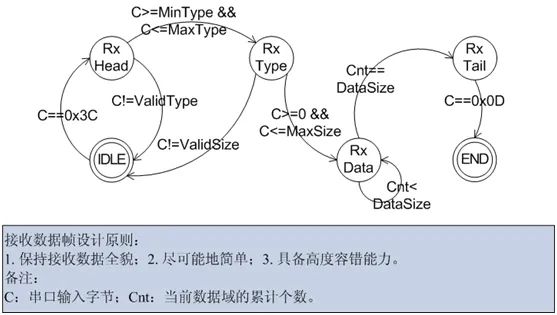
那么ISR處理這個狀態機來得及嗎?答案是:so easy!因為它只有3個動作,運算量十分小:
比較接收數據 -> 更新狀態變量 -> 存儲接收數據,C語言僅3條語句,翻譯成機器指令也不超過10條。
代碼清單如下:
/*** @brief Status of received communication frame*/typedef enum{STATUS_IDLE = (uint8_t)0,STATUS_HEAD, /* Rx Head=0x3C */STATUS_TYPE, /* Rx Type */STATUS_DATA, /* Data filed */STATUS_TAIL, /* Tail=0x0D */STATUS_END, /* End of this frame */} COMM_TRM_STATUS_TypeDef;/*** @brief Data object for received communication frame*/typedef struct{uint8_t byCnt; /* Count of 1 field */uint8_t byDataLen; /* Length of data field */uint8_t byFrameLen; /* Length of frame */COMM_TRM_STATUS_TypeDef eRxStatus;uint8_t a_byRxBuf[MAX_LEN_COMM_TRM_DATA];} COMM_TRM_DATA;/*** @brief Data object for received communication frame.* @note Prevent race condition that accessed by both ISR and process.*/static COMM_TRM_DATA s_stComm2TrmData;/*** @brief Put a data that received by UART into buffer.* @note Prevent race condition this called by ISR.* @param uint8_t byData: the data received by UART.* @retval None*/void comm2trm_RxUartData(uint8_t byData){/* Update status according to the received data */switch (s_stComm2TrmData.eRxStatus){case STATUS_IDLE:if (COMM_TRM_HEAD == byData) /* Is Head */{s_stComm2TrmData.eRxStatus = STATUS_HEAD;}else{goto rx_exception;}break;case STATUS_HEAD:if (TYPE_INVALID_MIN < byData && byData < TYPE_INVALID_MAX) /* Valid type */{s_stComm2TrmData.eRxStatus = STATUS_TYPE;}else{goto rx_exception;}break;case STATUS_TYPE:if (byData <= MAX_LEN_UART_FRAME_DATA) /* Valid data size */{s_stComm2TrmData.eRxStatus = STATUS_DATA;s_stComm2TrmData.byDataLen = byData;}else{goto rx_exception;}break;case STATUS_DATA:if (s_stComm2TrmData.byCnt < s_stComm2TrmData.byDataLen){++s_stComm2TrmData.byCnt;}else{s_stComm2TrmData.eRxStatus = STATUS_TAIL;}break;case STATUS_TAIL:if (COMM_TRM_TAIL == byData){/* We received a frame of data, now tell process to deal with it! */process_poll(&Comm2TrmProcess);}else{goto rx_exception;}break;default:ASSERT(!"Error: Bad status of comm2trm_RxUartData(). ");break;}/* Save the received data */s_stComm2TrmData.a_byRxBuf[s_stComm2TrmData.byFrameLen++] = byData;return;rx_exception:ClearCommFrame();return;}
原文:
https://blog.csdn.net/jiangjunjie_2005/article/details/50619884
審核編輯:符乾江
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
單片機
+關注
關注
6035文章
44554瀏覽量
634651 -
通信協議
+關注
關注
28文章
879瀏覽量
40297
發布評論請先 登錄
相關推薦
AUTOSAR通信協議解析 如何實現AUTOSAR通信
通信協議棧是一個復雜的系統,它涵蓋了多種通信方式和模塊,以實現車內ECU之間的高效、可靠的數據交換。以下是對AUTOSAR通信協議的解析及實現AUTOSAR通信的方法: 一、AUTOS
串口通信協議解析 串口通信應用實例
串口通信協議解析 串口通信協議是指規定了數據包的內容,內容包含了起始位、主體數據、校驗位及停止位,雙方需要約定一致的數據包格式才能正常收發數據的有關規范。以下是串口通信協議的介紹: 基本概念
PLC控制系統的通信協議解析
在現代工業自動化中,PLC控制系統扮演著至關重要的角色。它們不僅需要處理復雜的邏輯控制任務,還需要與其他系統和設備進行通信。為了實現這一目標,PLC系統必須遵循一系列的通信協議。 PLC通信協議
PROFINET通信協議是什么
PROFINET通信協議是一種專為工業自動化領域設計的基于以太網的實時通信協議。以下是對PROFINET通信協議的詳細解析,包括其定義、特點、體系結構、工作原理、通信方式、應用領域以及

簡單認識UART通信協議
UART(Universal Asynchronous Receiver/Transmitter,通用異步收發傳輸器)通信協議是一種常見的串行通信協議,廣泛應用于計算機、嵌入式系統、傳感器、無線通信
說明白了,Modbus RTU通信協議解析-成都電路板單片機開發
Modbus協議在工業控制、電氣、電子領域是個很常見的一種通信協議,很多遇見的傳感器、控制器、變頻器、驅動器之類的基本都支持該協議,常見到什么程度呢,就是你看到的一個設備如果支持串口
發表于 06-30 22:28
上位機與下位機通信協議的優化策略
在現代工業自動化系統中,上位機與下位機之間的通信是不可或缺的環節。上位機通常指負責監控、管理和控制功能的計算機或設備,而下位機則負責執行具體
can的通信協議主要由什么完成
CAN(Controller Area Network)是一種基于消息的通信協議,主要用于汽車和工業領域。它是一種局域網技術,允許多個設備在同一網絡上進行通信。CAN協議的主要特點包括高可靠性、實時
RS485通信協議的特性和應用范圍
隨著工業自動化和物聯網技術的飛速發展,數據通信協議的重要性日益凸顯。RS485通信協議作為一種廣泛應用于工業自動化領域的串行通信協議,其穩定性和可靠性得到了廣泛的認可。本文將對RS485通信協
UART串口通信協議是什么?
UART (Universal Asynchronous Receiver/Transmitter) 是一種通信接口協議,用于實現串口通信。它是一種簡單的、可靠的、廣泛應用的串口通信協議
工業控制通信協議的報文幀分別是什么樣的?
通信協議的設備上,有什么調試測試軟件推薦,盡量不要借助硬件設備,直接使用上位機和支持該協議的設備相連接,直接發送幀讀寫參數?最常見的協議就是
發表于 01-19 14:46





 工商網監
工商網監
評論