 UART的回環實例代碼設計
UART的回環實例代碼設計
1.UART
UART是異步串行通信口的總稱。它所包含的RS232RS449RS423等等是對應各種異步串行通信口的接口標準和總線標準。他們規定了通信口的電氣特性、傳輸速率、連接特性和機械特性等一系列內容,實際上屬于通信網絡的底層概念,與通信協議沒有直接關系。
幾個相關名詞的解釋:
·波特率:每秒鐘傳送的bit的個數。
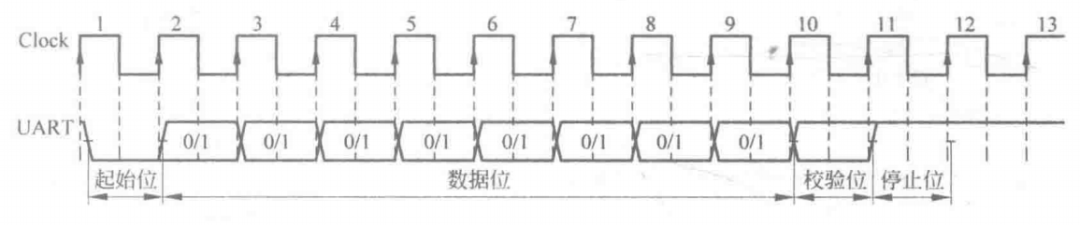
·起始位:先發出一個邏輯0的信號,表示傳輸數據的開始。
·數據位:衡量通信中實際數據位的參數,標準數據位可以是5、7、8位,從最低位開始傳輸。
·奇偶校驗位:UART發送時,檢查發送數據中“1”的個數,自動在奇偶校驗位添加1/0,用于發送數據的校驗。
·停止位:一個數據的結束標志,可以為1位、1.5位、2位的高電平。
·空閑位:處于邏輯1狀態,表示當前線路上無數據傳輸。
·時序圖:

·發送數據過程:空閑狀態,線路處于高電平,當收到發送數據指令后,拉低電平一個數據位的時間,接著數據按從低位到高位依次發送,數據發送完畢,接著發送奇偶校驗位和停止位(停止位為高電平),一幀數據發送結束。
·接收數據過程:空閑狀態,線路處于高電平,當檢測到線路的下降沿,說明線路有數據傳輸,按照約定的波特率從低位到高位接收數據,數據接收完畢,接著接收并比較奇偶校驗位是否正確,如果正確則通知接收端設備準備接收數據或存入緩存。
由于UART是異步傳輸,沒有同步傳輸時鐘。為保證數據傳輸的正確性,每個數據有16個時鐘采樣,取中間的采樣值,以保證不會誤碼或滑碼。
·設計實例:
下面是一個UART的回環實例代碼設計:
接收模塊uart_rx:
module uart_rx( input rxd, input clk, output receive_ack, output reg [7:0] data_i ); parameter IDLE = 0; parameter RECEIVE = 1; parameter RECEIVE_END = 2; reg [3:0] CS,NS; reg [4:0] count; reg [7:0] data_o_tmp; always@(posedge clk) CS <= NS; always@(*) begin NS <= CS; case(CS) IDLE: if(!rxd) NS = RECEIVE; RECEIVE: if(count == 7) NS = RECEIVE_END;else NS = NS; RECEIVE_END:NS = IDLE; default: NS = IDLE; endcase end always@(posedge clk) if(CS == RECEIVE) count <= count + 1; else if(CS == IDLE | CS == RECEIVE_END) count <= 0; always @(posedge clk) if(CS == RECEIVE)begin data_i[6:0] <= data_i[7:1]; data_i[7] <= rxd; end assign receive_ack = (CS == RECEIVE_END) ? 1 : 0; endmodule發送模塊uart_tx:
module uart_tx( input [7:0] data_o, input clk, input receive_ack, output reg txd ); parameter IDLE = 0; parameter SEND_START = 1; parameter SEND_DATA = 2; parameter SEND_END = 3; reg [3:0] CS,NS; reg [4:0] count; reg [7:0] data_o_tmp; always @ (posedge clk) CS <= NS; always @ (*) begin NS <= CS; case(CS) IDLE: begin if(receive_ack) NS = SEND_START; end SEND_START: begin NS = SEND_DATA; end SEND_DATA: begin if(count == 7) NS = SEND_END; end SEND_END: begin if(receive_ack) NS = SEND_START; end default: NS = IDLE; endcase end always @(posedge clk) if(CS == SEND_START) count <= count + 1; else if(CS == IDLE | CS == SEND_END) count <= 0; else count <= count; always @(posedge clk) if(CS == SEND_START) data_o_tmp <= data_o; else if(CS == SEND_DATA) data_o_tmp[6:0] <= data_o_tmp[7:1]; always @(posedge clk) if(CS == SEND_START) txd <= 0; else if(CS == SEND_DATA) txd <= data_o_tmp; else if(CS == SEND_END) txd <= 1; endmodulemodule uart_tx( input [7:0] data_o, input clk, input receive_ack, output reg txd ); parameter IDLE = 0; parameter SEND_START = 1; parameter SEND_DATA = 2; parameter SEND_END = 3; reg [3:0] CS,NS; reg [4:0] count; reg [7:0] data_o_tmp; always @ (posedge clk) CS <= NS; always @ (*) begin NS <= CS; case(CS) IDLE: begin if(receive_ack) NS = SEND_START; end SEND_START: begin NS = SEND_DATA; end SEND_DATA: begin if(count == 7) NS = SEND_END; end SEND_END: begin if(receive_ack) NS = SEND_START; end default: NS = IDLE; endcase end always @(posedge clk) if(CS == SEND_START) count <= count + 1; else if(CS == IDLE | CS == SEND_END) count <= 0; else count <= count; always @(posedge clk) if(CS == SEND_START) data_o_tmp <= data_o; else if(CS == SEND_DATA) data_o_tmp[6:0] <= data_o_tmp[7:1]; always @(posedge clk) if(CS == SEND_START) txd <= 0; else if(CS == SEND_DATA) txd <= data_o_tmp; else if(CS == SEND_END) txd <= 1; endmodule特定波特率產生模塊clk_div:
module clk_div( input clk, output reg clk_out );
parameter baud_rata = 9600;parameterdiv_num='d125_000_000/baud_rata;//分頻數等于時鐘頻率除以想要得到的波特率 reg [15:0] num;
always @(posedge clk) begin if(num == div_num) begin num <= 0; clk_out <= 1; end else begin num <= num + 1; clk_out <= 0; end end
endmodule
頂層文件uart_top:
module uart_top( input clk,inputrxd,outputtxd );
wire clk_9600; wire receive_ack; wire [7:0] data;
uart_tx uart_tx ( .clk (clk_9600), .txd (txd), .data_o (data), .receive_ack(receive_ack) );
uart_rx uart_rx ( .clk (clk_9600), .rxd (rxd), .data_i (data), .receive_ack(receive_ack) );
clk_div clk_div ( .clk (clk), .clk_out (clk_9600) );
endmodule
2.PS/2 PS/2是一種雙向同步串行通信協議。接口是一種6針的連接口,但只有四個引腳是有意義的,分別是Clock(時鐘)、Data(數據)、VCC和GND。其中時鐘和數據引腳是雙向的。PS/2常用于連接某些輸入設備,例如鼠標、鍵盤等。通信的兩端通過時鐘來同步,通過數據引腳來交換數據。任何一方想要抑制另外一方的通信,只需要將時鐘引腳拉低即可。 如果是PC和PS/2鍵盤之間通信,PC必須做主機,即PC可以抑制鍵盤發送數據,而鍵盤不能抑制PC發送數據。 PS/2的每一位數據幀包含11-12位,具體含義如下:
| 數據位名稱 | 說明 |
| 1個起始位 | 總是邏輯0 |
| 8個數據位 | 低位在前 |
| 1個奇偶校驗位 | 奇校驗 |
| 1個停止位 | 總是邏輯1 |
| 1個應答位 | 僅用在主機對設備的通信中 |
·PS/2的時序圖:
由設備產生時鐘和數據,主機根據時鐘來讀取數據。以FPGA和PS/2鍵盤為例,鍵盤產生時鐘和數據,FPGA只需要讀數據。當時鐘下降沿時,FPGA記錄數據信號。 ·設計實例: 主機為FPGA,根據PS/2的時序,得到鍵盤的按鍵值。雖然在時序圖中,主機是在時鐘下降沿讀取數據,但實際上要為了排除噪聲干擾,需要在FPGA端對信號進行濾波。下面給出設計代碼。
module ps2_keyboard( input clk, input clr, input PS2C, //ps2 clk in input PS2D, //ps2 data in output [15:0] xkey);reg PS2CF;reg PS2DF;reg [7:0] ps2c_filter;reg [7:0] ps2d_filter;reg [10:0] shift1;reg [10:0] shift2; assign xkey = { shift2[8:1], shift1[8:1] };always @(posedge clk or posedge clr) begin if (clr) begin ps2c_filter <= 11'b0; ps2d_filter <= 11'b0; PS2CF <= 1; PS2DF <= 1; end else begin ps2c_filter[7] <= PS2C; ps2c_filter[6:0] <= ps2c_filter[7:1]; ps2d_filter[7] <= PS2D; ps2d_filter[6:0] <= ps2d_filter[7:1]; if(ps2c_filter == 8'b1111_1111) PS2CF <= 1; //去時鐘毛刺 else if(ps2c_filter == 8'b0000_0000) PS2CF <= 0; if(ps2d_filter == 8'b1111_1111) PS2DF <= 1; //去數據毛刺 else if(ps2d_filter == 8'b0000_0000) PS2DF <= 0; endend always @(negedge PS2CF or posedge clr) begin if (clr) begin shift1 <= 11'b0; shift2 <= 11'b0; end else begin shift1 <= {PS2DF, shift1[10:1]}; shift2 <= {shift1[0], shift2[10:1]}; endend endmodule
原文標題:常用通信協議總結及FPGA實現(上)
文章出處:【微信公眾號:FPGA之家】歡迎添加關注!文章轉載請注明出處。
-
uart
+關注
關注
22文章
1235瀏覽量
101355 -
代碼
+關注
關注
30文章
4779瀏覽量
68525 -
異步串行通信
+關注
關注
0文章
16瀏覽量
8420
發布評論請先 登錄
相關推薦
UART應用中的實例源代碼程序-UART In-Applic
UART 4 UART參考設計,Xilinx提供VHDL代碼
UART參考設計,帶16byte緩沖 VHDL代碼 xapp
CAN—回環測試
python代碼示例之基于Python的日歷api調用代碼實例

代碼生成器配置和軟件UART的實現






 工商網監
工商網監
評論