") 數(shù)字孿生技術(shù)在自動駕駛測試領(lǐng)域的應用
數(shù)字孿生技術(shù)在自動駕駛測試領(lǐng)域的應用
摘要:
研究數(shù)字孿生技術(shù)在自動駕駛測試領(lǐng)域的應用。旨在構(gòu)建高度開放的數(shù)字孿生自動駕駛測試平臺,結(jié)合仿真測試工具、通信設(shè)備、真實測試車輛等功能單元,形成豐富的測試驗證環(huán)境,支持各類自動駕駛解決方案和算法驗證測試,具備在有限資源條件下開展虛擬復雜場景的自動駕駛實車測試驗證能力。提供一種全新的自動駕駛整車測試方法。
1.數(shù)字孿生技術(shù)介紹
1.1 數(shù)字孿生概念介紹
數(shù)字孿生(digital twin)的概念最初由Grieves教授于2003年在美國密歇根大學的產(chǎn)品全生命周期管理課程上提出[1],并被定義為三維模型,包括實體產(chǎn)品、虛擬產(chǎn)品以及二者間的連接。全球著名的IT研究與顧問咨詢公司Gartner連續(xù)兩年 (2016年和2017年)將數(shù)字攣生列為當年十大戰(zhàn)略科技發(fā)展趨勢之一[2],2017年12月8日中國科協(xié)智能制造學會聯(lián)合體在世界智能制造大會上將數(shù)字孿生列為了世界智能制造十大科技進展之一。
數(shù)字孿生的宏觀概念是指:是現(xiàn)有或?qū)⒂械奈锢韺嶓w對象的數(shù)字模型,通過實測、仿真和數(shù)據(jù)分析來實時感知、診斷、預測物理實體對象的狀態(tài),通過優(yōu)化和指令來調(diào)控物理實體對象的行為,通過相關(guān)數(shù)字模型間的相互學習來進化自身,同時改進利益相關(guān)方在物理實體對象生命周期內(nèi)的決策。[1]
總結(jié)上述定義的理解要點為:數(shù)字孿生是仿真應用的延伸和發(fā)展,不僅僅是物理世界的鏡像,也要接受物理世界的實時信息,更要反過來實時驅(qū)動物理世界。
本文結(jié)合自動駕駛測試,給出數(shù)字孿生在自動駕駛測試中的狹義定義:車輛處于真實的測試場地環(huán)境當中,同時將車輛通過數(shù)字通信等技術(shù),建模映射到虛擬空間內(nèi),之后在虛擬空間內(nèi)通過構(gòu)建不同的復雜交通環(huán)境,將有關(guān)信號通過仿真器進行仿真生成,然后發(fā)送給實際道路中的車輛。車輛接收到信號之后,對信號進行分析判斷,進而決策規(guī)劃到形成控制信號發(fā)送到底盤,執(zhí)行控制動作,車輛動作反饋回虛擬空間,從而達到對自車的決策規(guī)劃和控制執(zhí)行系統(tǒng)的考核能力。
1.2 數(shù)字孿生技術(shù)的主流應用
根據(jù)數(shù)字孿生技術(shù)的廣義定義,其不僅是映射物理世界,更需要接收物理世界的反饋信息,進而反過來驅(qū)動物理世界。這個過程的應用程度即數(shù)字孿生技術(shù)應用的成熟度,對應“數(shù)化、互動、先知、先覺、共智”。[1]
數(shù)字孿生的概念最早應用于航空航天領(lǐng)域,美國國防部最早提出將數(shù)字孿生技術(shù)用于航空航天飛行器的健康維護與保障。首先在數(shù)字空間建立真實飛機的模型,并通過傳感器實現(xiàn)與飛機真實狀態(tài)完全同步,這樣每次飛行后,根據(jù)結(jié)構(gòu)現(xiàn)有情況和過往載荷,及時分析評估是否需要維修,能否承受下次的任務載荷等,示意如圖1。
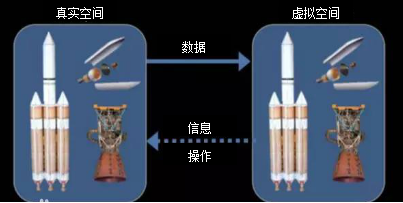
圖1航天數(shù)字孿生模型示意
數(shù)字孿生技術(shù)在工業(yè)4.0體系中扮演著重要的角色,主要應用包括“產(chǎn)品數(shù)字化孿生”、“生產(chǎn)工藝流程數(shù)字化孿生”和“設(shè)備數(shù)字化孿生”。在數(shù)字孿生技術(shù)驅(qū)動下 ,將傳統(tǒng)的預測性維護方法由被動響應轉(zhuǎn)型為主動服務的轉(zhuǎn)變過程,為中國制造業(yè)由“生產(chǎn)型制造”向“服務型制造”轉(zhuǎn)變提供支撐。[3]
數(shù)字孿生技術(shù)的虛實結(jié)合特性在智能網(wǎng)聯(lián)領(lǐng)域的應用日趨廣泛,主要包括智能網(wǎng)聯(lián)汽車開發(fā)制造、智能工廠平臺等工業(yè)應用和數(shù)字孿生自動駕駛測試應用。其中,在開發(fā)制造領(lǐng)域,數(shù)字孿生技術(shù)應用形式主要是產(chǎn)品設(shè)計建模、智慧生產(chǎn)線設(shè)計運行等方面。
2.自動駕駛測試評價方法分析
自動駕駛汽車行業(yè)發(fā)展迅速,但其開發(fā)階段的產(chǎn)品驗證方法仍然與現(xiàn)有傳統(tǒng)汽車保持很大程度的一致。其測試方法主要有:軟/硬件在環(huán)測試、封閉場地測試、開放道路測試。三種方法各有優(yōu)劣,任意一個部分并不能很好的保證測試效果。未來對自動駕駛汽車的檢驗檢測將會是軟硬件在環(huán)+封閉場地測試+實車路試驗有機結(jié)合的模式。
現(xiàn)有測試方法的優(yōu)劣對比分析如下表1。
表1 測試評價方法優(yōu)劣分析
| 方法 | 軟/硬件在環(huán)測試 | 封閉場地測試 | 開放道路測試 |
| 對象 | 軟件、部件、虛擬環(huán)境 | 實車、實路、假參與者 | 實車、實路、實參與者 |
| 優(yōu)勢 | 針對部件進行單獨驗證; 豐富、可重復的場景; 測試效率高; | 真實的道路和車輛動作; 場景可重復測試; 安全可控; |
無線豐富的真實場景; 真實交通參與者; 貼合實際使用; |
| 劣勢 | 依賴動力學模型; 無法驗證車輛執(zhí)行能力; | 測試場景數(shù)量有限; 場地共用性、可升級性差; | 路況不可控,安全風險大; 大量時間和成本投入; 可重復性差; |
隨著自動駕駛汽車技術(shù)不斷發(fā)展、交通場景日益復雜,如上現(xiàn)有測試方法在自動駕駛測試實踐中顯現(xiàn)出不足,具體表現(xiàn)在如下幾點:
1)測試場景碎片化不符合實際使用情況。汽車自動駕駛是一個連續(xù)行為,貼合實際使用的驗證必須需要廣闊的空間開展連續(xù)場景驗證,若在真實物理空間中實現(xiàn),花費的成本與時間不可接受;
2)復雜交通場景搭建的難度大、成本高、安全風險大,如隧道、多車沖突、預期功能安全場景等;
3)軟硬件在環(huán)測試依賴車輛動力學模型,模型難以復現(xiàn)真實車輛動力學,其精度對測試有較大影響;
4)真實封閉場地建設(shè)成本高,且建成后不能適應自動駕駛技術(shù)快速變化的測試需求;
5)開放道路中的交通參與物、交通流等不易復現(xiàn),不便開展大量的重復測試;
數(shù)字孿生技術(shù)在自動駕駛汽車測試領(lǐng)域具備其特殊的應用價值,可解決現(xiàn)有測試方法的不足,現(xiàn)就數(shù)字孿生技術(shù)如何在自動駕駛測試評價領(lǐng)域應用提出一種可行方案。
3.數(shù)字孿生自動駕
駛測試評價方法研究
基于數(shù)字孿生技術(shù)的自動駕駛測試評價方法,核心在于數(shù)字孿生技術(shù),其關(guān)鍵特點是“虛實結(jié)合”,將真實車輛動力學和虛擬復雜交通場景緊密聯(lián)系,并在測試過程中實時交互,即時生成評價結(jié)果。
此種方法相比上述現(xiàn)有測試方法,其優(yōu)勢在于:
1)場景設(shè)置連續(xù)且可定制,貼合實際使用的連續(xù)行駛場景;
2)可實現(xiàn)復雜場景的快速搭建和自動駕駛測試,節(jié)約場地建設(shè)成本;
3)不需要動力學模型,基于實際路面和車輛動態(tài)進行評價,測試結(jié)果更貼合實際;
4)所有測試基于數(shù)字試驗場,可快速適應自動駕駛技術(shù)升級帶來的新的測試需求;
5)測試效率高、場景可復現(xiàn)、可拓展性好,可平臺上云實現(xiàn)海量仿真測試;
現(xiàn)從方案框架體系、硬件方案、關(guān)鍵難點、應用預期四個方面對此方案進行介紹。
3.1 方案體系框架
概念方案從數(shù)字孿生技術(shù)“虛實結(jié)合”的關(guān)鍵特點出發(fā),主要包含數(shù)字孿生體、測試開展、評價等三個維度,構(gòu)成數(shù)字孿生自動駕駛測試評價體系的主線,如下圖2。
數(shù)字孿生落地應用的首要任務是創(chuàng)建應用對象的數(shù)字孿生模型[4],即形成數(shù)字孿生體。其構(gòu)建及實時信息交互是本方案的關(guān)鍵,需要將現(xiàn)實世界中的試驗場地、試驗對象、測試場景等數(shù)字化,形成孿生的數(shù)字試驗場、數(shù)字試驗對象、數(shù)字測試場景,使兩者成為互通的數(shù)字孿生體。
測試的工作機理:數(shù)字被測對象與真實被測對象孿生對應并受真實被測對象驅(qū)動→數(shù)字測試場景下發(fā)給真實被測對象→真實被測對象的決策執(zhí)行動作回傳給數(shù)字被測對象→數(shù)字被測對象在數(shù)字測試場內(nèi)完成動作→在數(shù)字測試場中采集數(shù)據(jù)并完成測試評價。
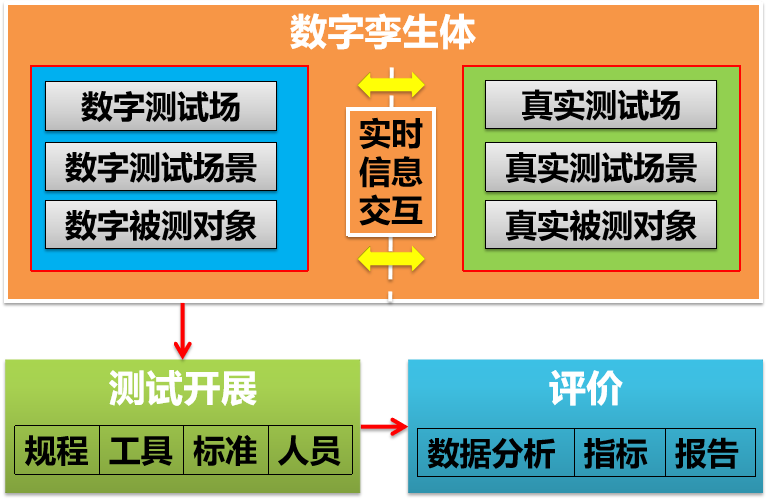
圖2 數(shù)字孿生測試評價體系概念圖
為實現(xiàn)上述數(shù)字孿生自動駕駛測試概念,對其體系構(gòu)成進行如下設(shè)計,詳細如下圖3。主要包含數(shù)字孿生測試設(shè)備(仿真平臺、數(shù)據(jù)下發(fā)和采集設(shè)備)、真實被測對象、評價分析、展示平臺4大部分。
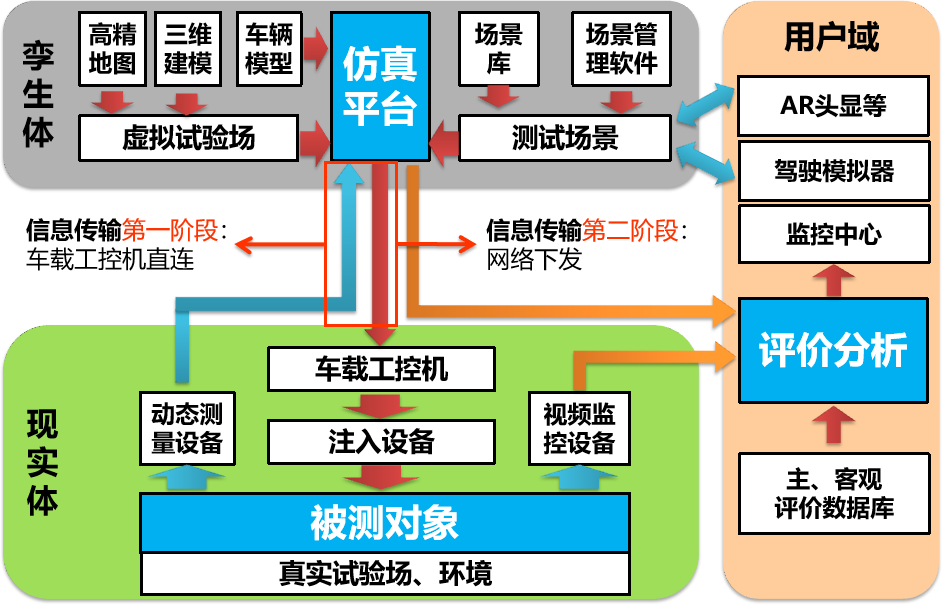
圖3 數(shù)字孿生測試評價體系構(gòu)成圖
以一臺自動駕駛汽車為被測對象,陳述系統(tǒng)工作過程:仿真平臺運行虛擬試驗場、車輛傳感器模型、測試場景,形成一個或多個自動駕駛測試場景(如十字路口通行場景),通過注入設(shè)備將場景信息下發(fā)至自動駕駛汽車的控制器,自動駕駛汽車根據(jù)自身算法對十字路口信息進行處理,發(fā)出決策信號(如減速通過),車輛執(zhí)行決策(如制動減速,緩慢通過路口);
該車輛的動作數(shù)據(jù)通過車端安裝的動態(tài)測量設(shè)備實時采集并上傳至仿真平臺用于驅(qū)動虛擬的自動駕駛汽車模型,在仿真平臺的場景中標注車輛動態(tài)數(shù)據(jù);評價分析模塊對車輛動態(tài)數(shù)據(jù)進行處理,基于評價維度和數(shù)據(jù)庫進行車輛行為評價;車端、路端視頻監(jiān)控設(shè)備信息以及仿真平臺畫面?zhèn)鬏斨琳故酒脚_。通過多樣的接口與用戶交互,呈現(xiàn)測試過程和結(jié)果。
結(jié)合主、客觀評價數(shù)據(jù)庫,對自動駕駛車輛的功能表現(xiàn)進行多維度分析。評價指標基于國際、國內(nèi)通用的標準、規(guī)范為基礎(chǔ),融合積累的大量實際測試數(shù)據(jù),從安全性、智能度、舒適性、可靠性四個關(guān)鍵維度進行綜合設(shè)定。
結(jié)合當前技術(shù)成熟度,對數(shù)字孿生自動駕駛測試評價體系方案的開展分三階段進行,如下表2所示。在5G網(wǎng)絡(luò)覆蓋度低、網(wǎng)絡(luò)時延不穩(wěn)定的情況下,開展車端下發(fā)方案建設(shè),通過車載數(shù)字孿生測試設(shè)備與車輛控制器直連注入,保證單車測試能力;在5G網(wǎng)絡(luò)成熟并穩(wěn)定的情況下,開展網(wǎng)絡(luò)下發(fā)方案建設(shè),可減少車端設(shè)備數(shù)量、降低單車設(shè)備成本、提高測試規(guī)模和效率;前兩個階段研究成熟后,開展擴展應用,如數(shù)字孿生仿真平臺上云、傳感器動力學模型校準等應用。
表2 技術(shù)方案開展階段規(guī)劃
| 階段 | 車端下發(fā)階段 | 網(wǎng)絡(luò)下發(fā)階段 | 擴展應用階段 |
| 主要內(nèi)容 | 建設(shè)搭載于測試車輛上的孿生設(shè)備,仿真場景與車輛直連注入 | 建設(shè)控制中心,仿真場景通過5G/網(wǎng)絡(luò)下發(fā)至測試車輛 | 開展數(shù)字孿生測試系統(tǒng)擴展應用,研究傳感器模型、動力學模型校準,云仿真等應用 |
| 適用范圍 | 網(wǎng)絡(luò)差、單車測試 | 網(wǎng)絡(luò)優(yōu)、批量實車測試 | 校準測試、云仿真 |
基于上述概念方案,設(shè)計可實現(xiàn)的硬件布局方案,如下圖4、圖5所示。硬件配置方案分車端下發(fā)和網(wǎng)絡(luò)下發(fā)兩種,對應表2所示的前兩個階段。
3.2 方案硬件布局
車載下發(fā)方案主機及相關(guān)設(shè)備均安裝在被測車輛上,通過注入設(shè)備及硬線與被測車輛控制器相連接,實現(xiàn)信息的交互。
網(wǎng)絡(luò)下發(fā)方案的主機在試驗室內(nèi)或者云端,通過網(wǎng)絡(luò)形式(5G/V2X)下發(fā)至車載設(shè)備,接收轉(zhuǎn)換之后,完成注入和信息交互。
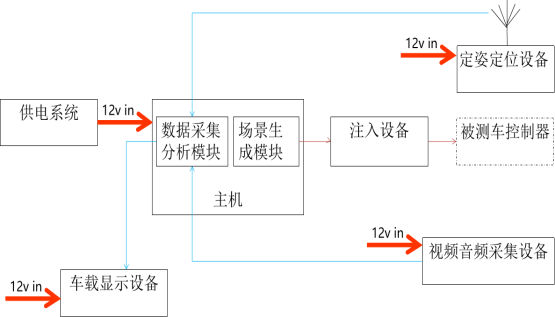
圖4 車端下發(fā)方案
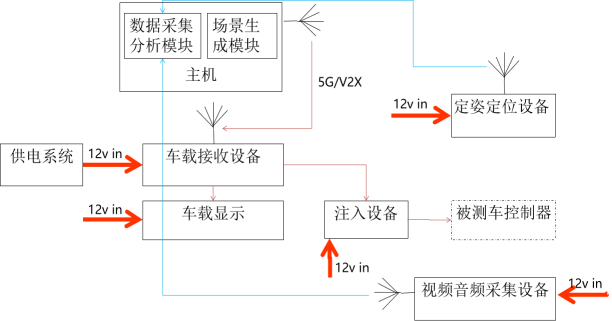
圖5 網(wǎng)絡(luò)下發(fā)方案
3.3 方案關(guān)鍵難點
在本方案中,信息交互技術(shù)是決定數(shù)字孿生能否真正實現(xiàn)虛實結(jié)合的關(guān)鍵難點,主要體現(xiàn)在下述幾個方面: 3.3.1場景注入多車型通用性的問題 自動駕駛汽車控制器接口協(xié)議、算法語言等百家爭鳴,對一種場景格式的識別程度可能存在不同,場景注入在多種車型上的通用性是必須考慮的問題。本方案嘗試采取兩種方式進行解決:一是對外開放,即參考主流通信協(xié)議將場景注入格式標準化,并將關(guān)鍵的注入參數(shù)明確化,讓被測對象主動進行適配接收。二是開發(fā)多個注入模板,即針對各大協(xié)議、廠商等,研究制定多個適用的場景注入格式模板,盡可能提升場景注入的快速適用性。 3.3.2信息傳輸時延導致交互不實時的問題 自動駕駛車速越高,信息傳輸時延帶來的影響越大,例如當被測車輛以60 km/h的車速通過A點時,觸發(fā)虛擬測試場景下發(fā)動作,信息傳輸時延100 ms,虛擬測試場景到達被測車輛時車輛已經(jīng)超過A點約1.7 m,這使得數(shù)字場景與真實場景在同一時刻存在較大的位置差異,這對自動駕駛安全性功能測試來講誤差不可接受。在數(shù)字孿生技術(shù)方案實施時,需要從兩方面同時著手來解決此問題:一是盡可能降低傳輸時延,如采用硬線直連、采用5G通信等;二是在仿真平臺采用同步技術(shù)彌補時延帶來的誤差。 3.3.3測試效率提升的問題 隨著自動駕駛行業(yè)蓬勃發(fā)展,自動駕駛汽車開發(fā)測試需求必將是大批量的、需要的測試場景更是海量的。若采用每臺車輛匹配一套數(shù)字孿生測試系統(tǒng)的方式,為達到海量場景測試,需要使用多套系統(tǒng)并進行長時間累積測試。所以在選擇數(shù)字孿生仿真平臺時必須考慮未來拓展應用,具備布署云端的能力,實現(xiàn)一套系統(tǒng)支持多車同時測試、云端海量場景仿真等應用。
3.4 應用預期
虛擬仿真測試技術(shù)被列為測試方法三支柱之一,從敏捷開發(fā)、高適應性、批量測試方面具備獨到的優(yōu)勢。數(shù)字孿生技術(shù)的突破性應用,可以解決現(xiàn)有仿真測試真實性欠缺的問題、降低對測試場地和交通參與者的依賴、提高對自動駕駛需求場景的響應速度,為自動駕駛汽車提供一種全新的高效、安全、可不斷升級的測試方法。隨著經(jīng)驗的積累和數(shù)據(jù)量的增加,數(shù)字孿生模型對物理實體的仿真預測準確度會越來越高[5]。例如對毫米波傳感器模型精確度的提升,可以將某一真實目標物的毫米波雷達特性模型化,通過數(shù)字孿生測試的方式測試真實車輛控制器對此模型輸入后的響應,再比對真實車輛面對此真實目標的測試數(shù)據(jù),對毫米波雷達模型進行精確度的優(yōu)化。 數(shù)字孿生技術(shù)還可以幫助實現(xiàn)自動駕駛邏輯策略的實時優(yōu)化,此優(yōu)化特指使自動駕駛行為更貼近人的駕駛行為。系統(tǒng)配備AR頭顯,引入駕駛員在環(huán)概念,可實時向駕駛員顯示當前車輛正在經(jīng)歷的數(shù)字孿生測試場景,可實時對比自動駕駛控制行為與駕駛員意向控制行為的差異,輸出分析數(shù)據(jù),進而幫助優(yōu)化自動駕駛邏輯策略。 預期數(shù)字孿生自動駕駛測試評價方案在自動駕駛汽車研發(fā)測試、認證檢測、產(chǎn)品準入、競品對標、綜合評價、動力學模型校驗、傳感器模型校驗等方面具備廣闊的應用前景。 本文主要從微觀層面介紹數(shù)字孿生在自動駕駛整車測試領(lǐng)域的應用,從宏觀維度來看,數(shù)字孿生技術(shù)在測試系統(tǒng)領(lǐng)域也具備重要的應用意義,例如測試區(qū)數(shù)字化管理、測試體系監(jiān)管調(diào)度平臺等。
總 結(jié)
本文結(jié)合數(shù)字孿生技術(shù)和自動駕駛測試評價技術(shù),研究數(shù)字孿生技術(shù)在自動駕駛測試領(lǐng)域的應用方案,形成一種可實施的系統(tǒng)架構(gòu),提出一種新型、高效、安全的虛實相結(jié)合的實車在環(huán)測試方法,并對數(shù)字孿生技術(shù)應用過程中的關(guān)鍵技術(shù)難點、解決方案要點進行了說明,可為數(shù)字孿生技術(shù)的同類應用提供參考,以達到更好開展數(shù)字孿生技術(shù)應用的目的。
審核編輯 :李倩
-
自動駕駛
+關(guān)注
關(guān)注
784文章
13923瀏覽量
166818 -
數(shù)字孿生
+關(guān)注
關(guān)注
4文章
1342瀏覽量
12313
原文標題:數(shù)字孿生技術(shù)在自動駕駛測試領(lǐng)域的應用研究概述
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
從《自動駕駛地圖數(shù)據(jù)規(guī)范》聊高精地圖在自動駕駛中的重要性

自動駕駛測試在設(shè)計環(huán)節(jié)中有何關(guān)鍵作用?
一文聊聊自動駕駛測試技術(shù)的挑戰(zhàn)與創(chuàng)新

MEMS技術(shù)在自動駕駛汽車中的應用
人工智能的應用領(lǐng)域有自動駕駛嗎

自動駕駛HiL測試方案案例分析--ADS HiL測試系統(tǒng)#ADAS #自動駕駛 #VTHiL
自動駕駛技術(shù)的典型應用 自動駕駛技術(shù)涉及到哪些技術(shù)
FPGA在自動駕駛領(lǐng)域有哪些優(yōu)勢?
FPGA在自動駕駛領(lǐng)域有哪些應用?
深度學習在自動駕駛中的關(guān)鍵技術(shù)
自動駕駛仿真測試實踐:高精地圖仿真

小馬智行再獲自動駕駛卡車編隊測試許可
小馬智行首批開啟北京南站自動駕駛測試






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論