 冗余EPS關鍵技術解析
冗余EPS關鍵技術解析
引言
在乘用車領域,電動助力轉向系統(Electric Power Steering,EPS)相比傳統的液壓助力轉向系統(Hydraulic Power Steering,HPS)具有結構簡單、響應迅速、能耗低等優點,因此應用很廣。隨著智能駕駛的發展,作為底層執行系統的電動助力轉向系統(EPS)也迎來了新的機遇與挑戰。為了滿足L3級以上自動駕駛的需求,同時提升智能駕駛的駕駛體驗、安全性、可靠性等,要求電動助力轉向系統(EPS)在發生單點失效的情況下,依然具備一定的助力能力。因此,冗余電動助力轉向系統,即冗余EPS,成為L3級以上智能駕駛系統的關鍵零部件。本文主要介紹冗余EPS的發展路徑和關鍵技術。
一、轉向技術發展路徑
轉向系統是汽車底盤的關鍵部件之一,對于汽車的操穩性、安全性、舒適性起到至關重要的作用。隨著汽車工業電動化的深入,轉向系統經歷了從機械轉向系統(MS)、機械液壓轉向助力系統(HPS)到電子液壓助力轉向系統(EHPS)、電動助力轉向系統(EPS)的發展歷程。相比機械和液壓轉向系統,電動助力轉向系統(EPS)的結構更加簡單、助力控制響應更快,同時能耗也更低,而且不需要保養和維護,大大提升了用戶的駕駛體驗。汽車工業電動化的同時,智能化成為了轉向技術發展新的驅動力。為了更好地滿足自動駕駛的需求,轉向系統需要有更高的安全性和可靠性,從而保證轉向系統在出現電氣系統故障的時候整車仍然可以進入安全狀態甚至繼續安全駕駛。因此,冗余EPS、線控轉向系統(SBW)開始進入人們的視野。其中線控轉向(SBW)相比冗余EPS最大區別在于方向盤和執行機構之間無機械連接,因此在成本控制、設計靈活性、功能豐富性、空間布置等方面具有明顯優勢。
轉向系統作為底盤核心零部件,具有很高的技術壁壘。我國汽車工業起步相對較晚,因此當前德國、美國、日本、韓國的供應商巨頭仍然占據著轉向系統的大部分市場,尤其是冗余EPS和線控轉向系統,國內仍然處于追趕的狀態。但是隨著國內汽車產業鏈的日漸成熟,一些企業也開始逐步掌握轉向系統的核心技術,未來有望快速提升所占的市場份額。
二、?轉向技術發展路徑
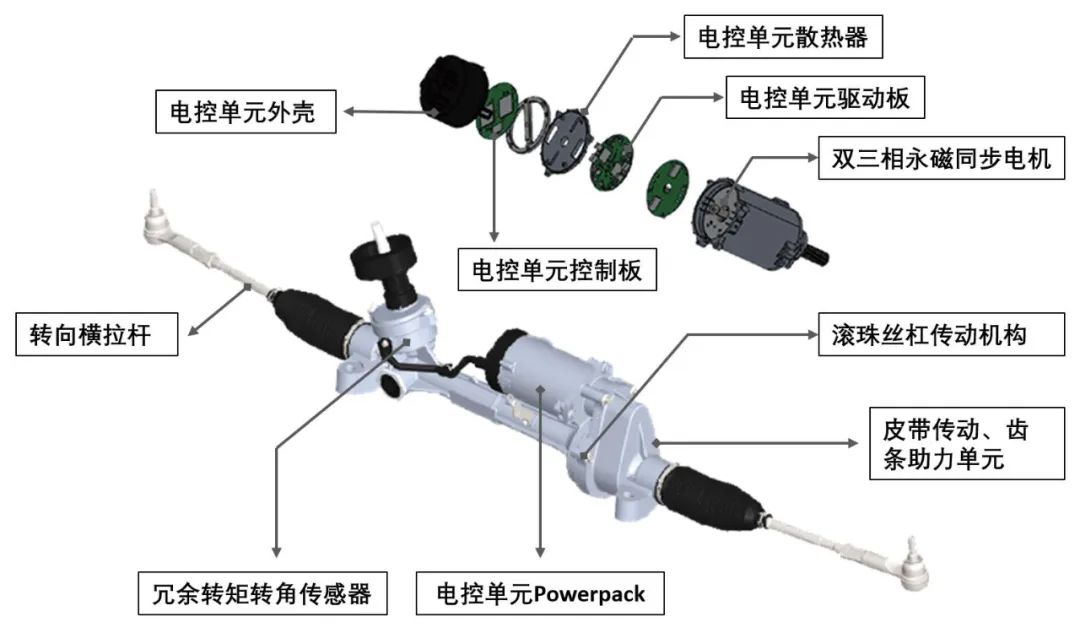
? 冗余EPS系統主要由機械系統部件、轉矩轉角傳感器總成(TAS)以及電控單元(Powerpack)組成,如圖2-1所示。以皮帶傳動齒條助力轉向系統(R-EPS)為例,機械系統主要由齒輪齒條副、滾珠絲杠傳動機構、皮帶傳動單元、轉向橫拉桿等組成。可支持的最大齒條力達到16kN以上,能夠滿足豪華轎車、SUV以及商務車的要求。轉矩轉角傳感器總成用于檢測轉向扭矩和方向盤轉角,主流的冗余傳感器方案通常能夠提供4路轉矩信號和2路轉角信號,顯著提升了安全性。電控單元是冗余EPS的核心部分,由助力電機以及驅動和控制單元組成,助力電機通常采用六相或十二相無刷直流電機,由于單點失效導致其中三相無法正常驅動時,剩余部分仍可正常工作,為轉向系統提供助力。驅動和控制單元集成在電機的后端,由驅動板、控制板、散熱器、外殼等組成。
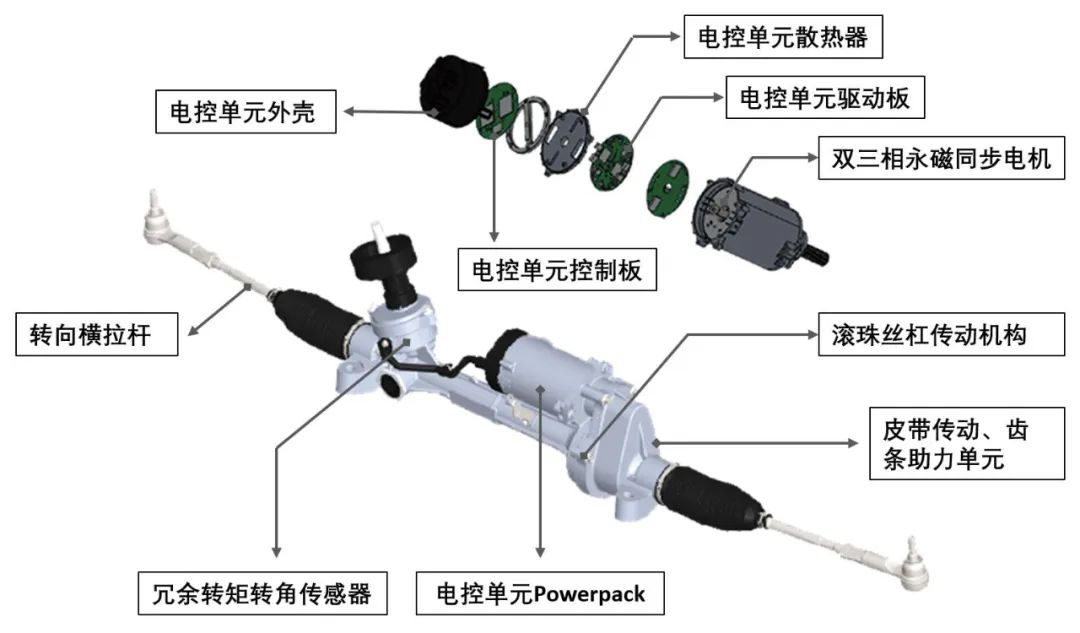
圖2-1 冗余EPS系統方案示意圖
基于雙三相無刷直流電機的全冗余電控方案如圖2-2所示,整個方案采用了雙路獨立外部供電、雙路外部CAN/CANFD通信以及冗余的轉矩、轉角傳感器信號。電機驅動單元、電機位置傳感器、電源管理單元、主控MCU也都采用了雙備份的冗余架構。主控MCU采用帶鎖步核的32位芯片,具有較高的算力,同時最高支持ASIL-D功能安全等級。雙MCU之間采用CANFD通信,實現信號交互、力矩指令傳遞、故障診斷信號交互等,可以起到相互監控的作用,必要時支持主輔切換,提升了整個系統的安全性和可靠性。
根據《GB/T 40429-2021 汽車駕駛自動化分級》對于L3級自動駕駛的定義,車輛在有條件設計運行范圍內運行,允許駕駛員注意力離開駕駛任務,但是在系統提示需要接管的時候應該進行適當的響應。基于上述冗余方案,電氣系統在出現單點失效的場景下,最多損失50%的助力能力,因此對于大部分限定條件下的L3級自動駕駛功能,能夠保證整車在系統提示接管到駕駛員完成階段的時間段處于安全狀態。
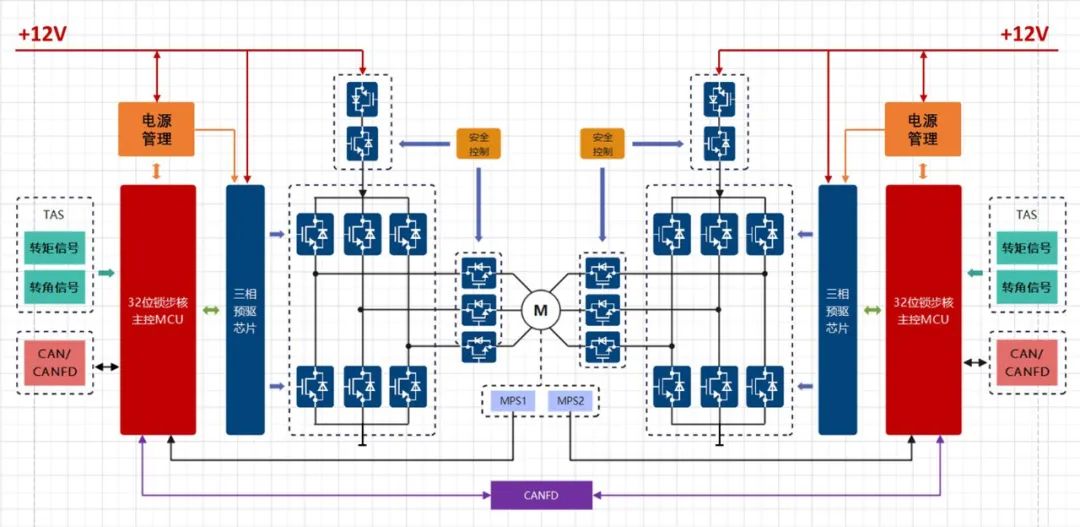
圖2-2 冗余EPS電控方案示意圖
三、冗余EPS關鍵技術
3.1 冗余策略與安全機制
如圖3-1所示為冗余EPS的雙MCU架構。雙MCU(ECU A和ECU B)都實現完整控制功能,上電初始化后默認分配主從角色。正常工作狀態下,雙系統均進行力矩指令計算,但是從系統響應主系統分配的扭矩指令。如果系統發生單點失效,雙MCU根據故障診斷與處理機制判斷是否進行主從切換,必要時從系統切換為主系統。
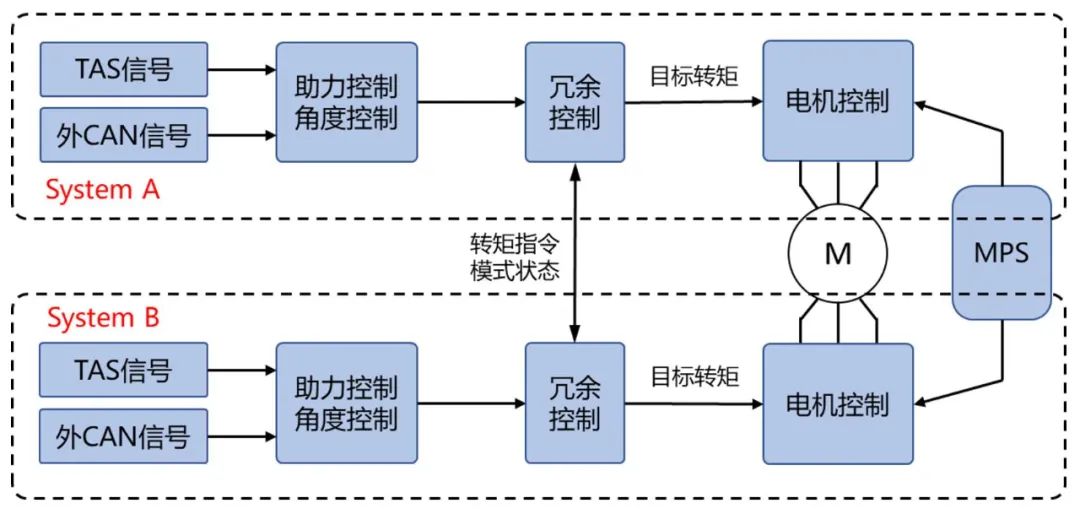
圖3-1 冗余策略與安全機制示意圖
3.2 基礎助力算法
基礎助力算法的主要作用是為駕駛員提供助力同時保證駕駛員具有良好的駕駛手感,其算法架構如圖3-2所示。
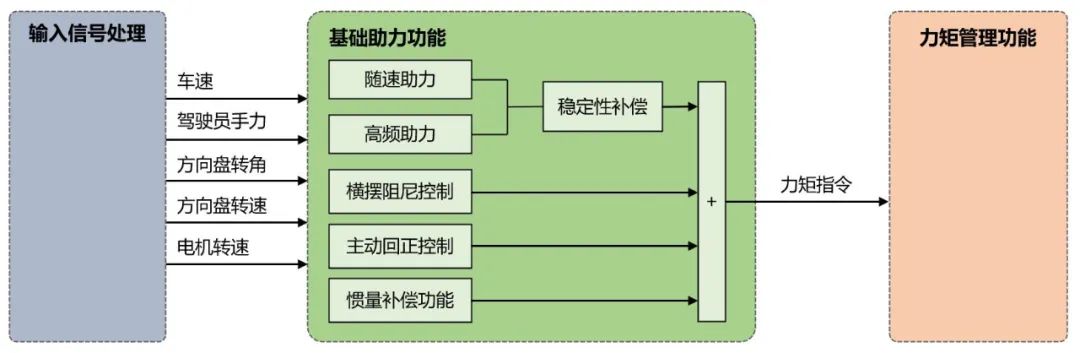
圖3-2 基礎助力算法架構
基礎助力算法包含隨速助力、高頻助力、穩定性補償、橫擺阻尼控制、主動回正控制以及慣量補償等模塊,各個算法模塊作用如下:
隨速助力:提供隨車速變化的助力,提供駕駛員中間位置感覺,中心區域到兩側要使駕駛員有力的建立的感覺;
高頻助力:能夠消除系統的慣性,減少粘性和提高應答性,并消除反向或快速轉向時的助力延遲;
穩定性補償:在低頻段保持真實的手感;中頻段降低系統增益,防止系統共振;高頻段提升系統的相位裕度,增加穩定性和快速性。
橫擺阻尼控制:增加系統的穩定性,防止方向盤在回正過程中出現“搖頭”現象。
主動回正控制:主動回正控制在車速較低時給系統一個額外的回正力,提升駕駛員的駕駛體驗。
慣量補償控制:計算電機慣量補償力矩,并疊加到助力力矩上,使得電機的慣量不影響轉向手感。
3.3 高級助力功能
高級助力功能在基礎助力的基礎上進一步提升駕駛的舒適性以及安全性,高級助力算法架構如圖3-3所示。
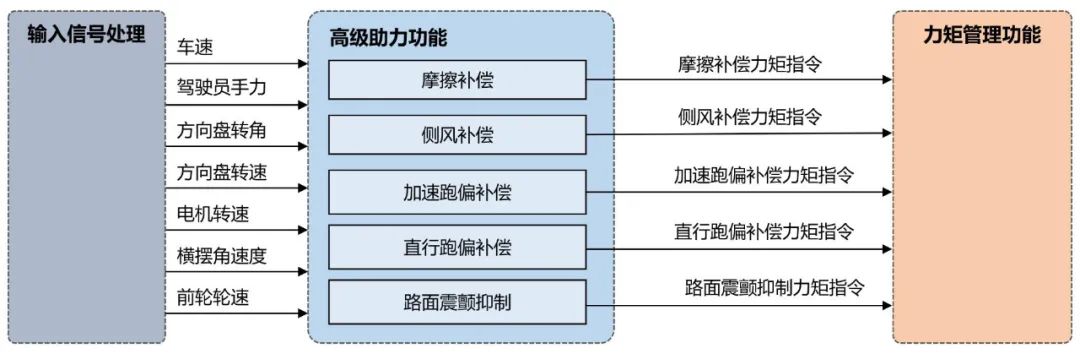
圖3-3 高級助力算法架構
高級助力算法包含摩擦補償模塊、側風補償模塊、加速跑偏補償模塊、直行跑偏補償模塊、路面震顫抑制模塊等,各個算法模塊的作用如下:
摩擦補償:摩擦補償功能來彌補轉向系統產生的摩擦從而保證轉向力的舒適性;補償目標和當前轉向感覺之間的差異。
側風補償:遇到較強側風時,應具有保證車輛穩定直線行駛的能力,防止側風導致車輛發生偏轉而偏離直線行駛軌跡。
加速跑偏補償:急加速的過程中,左右車輪上的牽引力不一致導致行駛跑偏的時候,通過補償來保持直線行駛。
直行跑偏補償:正常直行過程中如果存在一定的跑偏現象,可以通過直行跑偏補償進行適當緩解。
路面震顫抑制:路面震顫抑制算法檢測輪速信號,同時對手盤力矩中與輪速頻率正相關的頻率特征進行提取后,在最終施加給電機的力矩中減掉這一頻率特征信號與路面震顫進行抵消,從而達到抑制的目的。
3.4 外部請求控制
冗余EPS的外部請求控制功能包含自動駕駛相關的功能以及底盤穩定性相關的功能。自動駕駛相關的功能有轉矩疊加控制(Torque Overlay)、轉角疊加控制(Angle Overlay)、絕對轉角控制、泊車轉角控制、方向盤振動提醒等,底盤穩定性相關的功能包含Driver Steering Recommendation(DSR)功能。不同功能的原理介紹如下:
轉矩疊加控制:能夠響應智能駕駛控制器要求的疊加扭矩,實現如車道保持輔助(LKA)等高級駕駛輔助(ADAS)功能。轉向系統的轉矩疊加控制算法需要系統兼顧ADAS功能的安全作用和混合駕駛舒適性。
轉角疊加控制:能夠響應智能駕駛控制器要求的角度跟蹤指令,并在EPS內部通過合理的計算轉化為疊加扭矩指令。基于轉角疊加控制實現的LKA功能能夠更好地實現車道線跟蹤的效果,進一步降低駕駛員的駕駛壓力。作為ADAS功能的接口,轉角疊加控制功能同樣需要兼顧ADAS功能的安全作用和混合駕駛舒適性。
自動駕駛轉角控制:L3+自動駕駛場景允許駕駛員的雙手離開方向盤,此時轉向系統通過自動駕駛轉角控制功能來精確、快速地響應智能駕駛控制器的目標轉角指令,對于角度控制的精度要求很高。在此場景下,無需考慮混合駕駛的場景,但是需要保證駕駛員駕駛與自動駕駛狀態切換過程的安全性和舒適性。
泊車轉角控制:泊車轉角控制用于智能駕駛的低速泊車場景,該場景下要求轉向系統能夠快速響應泊車控制器的目標轉角指令。
DSR功能:該功能用于轉向與制動系統的協調控制場景。當ESC檢測到抱死或側滑即將發生時,通知EPS施加一個力幫助駕駛員進行轉向操作,可以有效的降低剎車距離、防止或減弱甩尾現象。
方向盤振動提醒:通過助力電機的高頻振動來實現方向盤振動提醒功能,振動強度多檔可調,可用于車道偏離預警等ADAS功能。

圖3-4 外部請求控制功能
四、小結
冗余EPS已經成為當前L3+自動駕駛場景下的核心技術。相比傳統的非冗余EPS,冗余EPS需要更加復雜的系統架構和更加復雜的功能來保證車輛的安全性、可靠性和駕駛體驗,因此也有更高的技術壁壘。國際領先的供應商已經在該領域積累多年,國內的供應商也在積極追趕,相信未來能夠為消費者提供更多安全、可靠、舒適的產品。
審核編輯 :李倩
-
冗余
+關注
關注
1文章
111瀏覽量
20238 -
EPS
+關注
關注
6文章
195瀏覽量
31277 -
自動駕駛
+關注
關注
784文章
13839瀏覽量
166552
原文標題:L3自動駕駛的“雙保險”:冗余EPS關鍵技術解析
文章出處:【微信號:trinova-tech,微信公眾號:英創匯智】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
云計算HPC軟件關鍵技術
先進雙向點焊控制器在工業生產中的關鍵技術應用與解析
實驗室被動式空氣凈化技術關鍵技術解析
經緯恒潤全冗余R-EPS助力L4級自動駕駛落地

LLM大模型推理加速的關鍵技術
儲能BMS的關鍵技術是什么
車載電池的類型及關鍵技術分析
冗余電動助力轉向系統EPS的發展路徑和關鍵技術介紹







 工商網監
工商網監
評論