 ADAS車道偏離檢測技術
ADAS車道偏離檢測技術
車道偏離預警系統(Lane Departure Warning System)是ADAS系統的重要功能之一,可以根據前方道路情況和自車位置的關系,來檢測和判斷車輛偏離車道的潛在危險,并對駕駛員進行及時提醒,避免因駕駛員疏忽、分心等原因而造成車道偏離事故。
據美國道路安全機構研究表明:約有50%的汽車交通事故是因為汽車偏離正常行駛車道引起的,車道偏離也被看成車輛側翻事故的主要原因。而車道偏離警示系統則能將事故死亡率降低86%。
目前國內對車道偏離預警系統有明確的標準體系,國標GB/T 26773-2011《智能運輸系統 車道偏離報警系統 性能要求與檢測方法》,規定了對乘用車和商用車車道偏離報警的要求。行業標準JT/T883-2014《營運車輛行駛危險預警系統技術要求和試驗方法》也基于GB/T 26773對營運類車輛的車道偏離狀態報警功能進行了說明。
LDWS系統主要包含三大模塊:環境感知、偏離決策和預警輸出。首先通過攝像頭等傳感器獲取前方道路環境信息,然后結合自車的行駛狀態、與車道線的距離、以及車道偏離的越界時間來判斷車輛偏離情況,并根據預警規則決定是否發出預警信息。
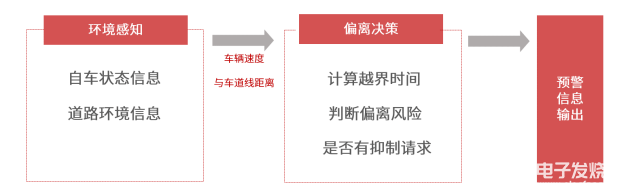
LDWS基本流程示例
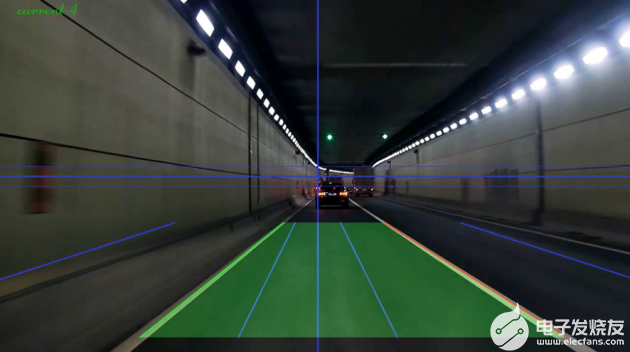
LDWS通過車載攝像頭等傳感器來感知環境,因此前期攝像頭的安裝、標定和校對會影響后期的檢測準確度。比如在虹軟方案中,會將ADAS攝像頭安裝在車輛擋風玻璃正中間,使前方道路清晰可見;并調整攝像頭的俯仰角,讓359°的地平線與遠處的地平線(地面與天空相交的線)重合,保證地平線在視野中央位置:此時若車輛在車道內居中直行,則左右車道線對稱顯示在畫面兩側。

ADAS攝像頭安裝位置示意
同時,為了排除車身存在的干擾因素,虹軟算法在實際應用和標定時,還將車身寬度、車輪與攝像頭的相對位置、車頭與攝像頭的相對位置均加入到預設指標中,由此可以適配不同外觀形態的車輛,且能更準確地判斷車身與車道線的距離,使預警系統更為精準。
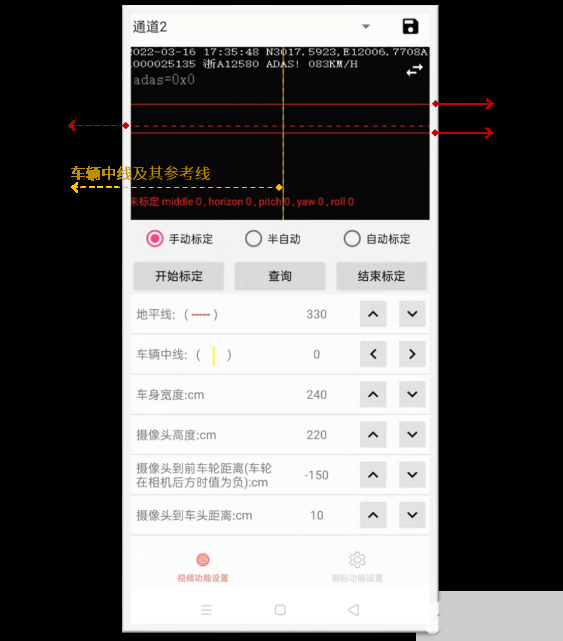
虹軟ADAS攝像頭標定示例
在通過攝像頭初步獲取環境信息后,LDWS需要進行車道線檢測、車道線跟蹤以及車道偏離檢測這三大重要步驟。
虹軟的車道線檢測是基于深度學習的,在捕捉道路圖像后,先截取其中感興趣的圖像區域,并通過卷積神經網絡將圖像中的車道線特征提取出來,據此可以預測選取的感興趣區域內是否有車道線以及車道參數、方向和位置。但在車道線檢測過程中,常常會出現很多干擾因素,諸如車道線磨損、樹蔭遮擋、積水影響等等情況,都會導致車道線檢測誤差,于是又用車道線跟蹤來幫助提升算法檢測的魯棒性。

車道線跟蹤,是利用車輛行駛時環境信息數據的連續性和關聯性,通過多張圖像信息,在前一時刻檢測結果的基礎上預判下一時刻車道線的位置和方向。常用的是基于濾波法來確定下一幀感興趣區域,在該區域內檢測車道線,以減少檢測時間以及其他干擾因素影響。
車道線檢測和跟蹤圖示
虹軟LDWS算法中檢測和跟蹤的目標車道線功能符合行標JT/T883要求,車道偏離報警能檢測到以下車道線并進行有效預警:
黃色和白色實線
黃色和白色虛線
雙黃和雙白實線
雙黃和雙白虛線
黃色和白色虛實線
完成車道線檢測和跟蹤后,就可以進一步判斷車道偏離情況。虹軟通過深度學習方法檢測出畫面中的所有車道線,結合實際駕駛情況,主要檢測自車當前所在的車道線,即離自車最近的兩條車道線。根據自車車身與所在車道左右車道線之間的橫向距離以及橫向距離的變化,來判斷車輛是否出現車道偏離狀況。判斷邏輯與主流方法一樣,主要參照了國標GB/T 26773——其中定義了報警臨界線、最早報警線、最晚報警線和車道偏離點等,并由此計算出報警的觸發時機。
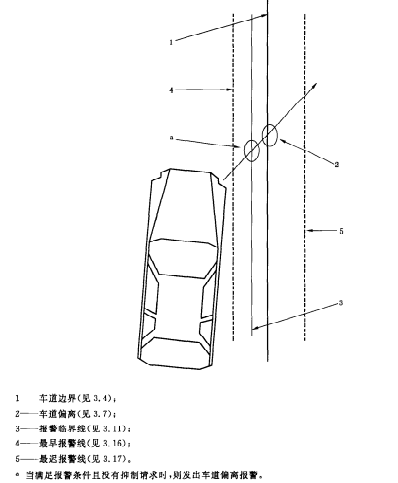
TTLC為出現車道偏離所需時間,D指的是車輛特定部位(車身)與車道邊界的橫向距離,v則為車輛偏離速度。在劃定好LLTC值的情況下,報警臨界線會受偏離速度影響而變化,但最早報警線位置一般在車道線內0.75-1.5m的范圍內浮動。
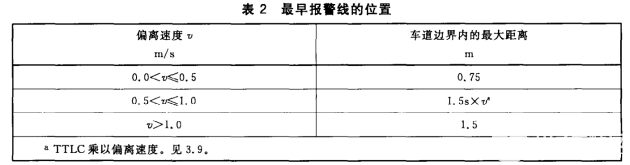
針對最遲報警線,乘用車和商用車的要求有所差異,乘用車最遲警報線為車道線邊界外側0.3米,商用車則為1米。車道偏離預警系統須在汽車越過最早報警線、未碰到最遲報警線期間觸發。
通過實車道路測試,虹軟車道偏離檢測的檢出率和準確率均在95%以上 ,誤檢率低。
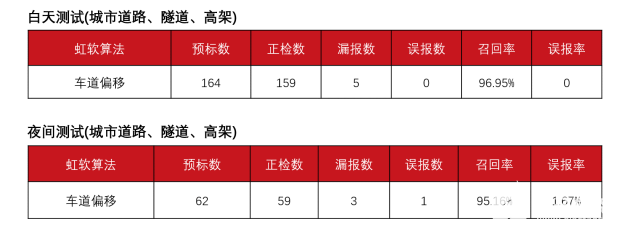
車道線偏移報警檢測測試示例
在乘用車和商用車前后裝領域,虹軟視覺ADAS技術經過了長時間的驗證,有很多成熟的落地使用案例,獲得了業內的普遍認可,但提升精度、提高速率、降低成本仍是不斷優化迭代的方向。
審核編輯 黃昊宇
-
檢測技術
+關注
關注
2文章
354瀏覽量
29075 -
車道偏離報警
+關注
關注
0文章
2瀏覽量
6932 -
adas
+關注
關注
309文章
2183瀏覽量
208632
發布評論請先 登錄
相關推薦
ADAS高級駕駛輔助系統

【實戰】Python+OpenCV車道線檢測識別項目:實現L2級別自動駕駛必備(配套課程+平臺實踐)

一文解析ADAS的基礎知識

基于Arm平臺的ADAS引領汽車安全未來

VCA821偏離和發燙是什么原因?
千億高級駕駛輔助市場不可或缺的技術,是提升LiDAR和ADAS性能的關鍵!

雷達傳感器增強ADAS安全性,實現駕駛員便利功能





 工商網監
工商網監
評論