 是什么塑造了自動駕駛汽車的格局?
是什么塑造了自動駕駛汽車的格局?
自動駕駛汽車 (AV) 行業在許多方面不斷發展:技術、用例、安全標準、安全立法等等。本專欄探討了推動和塑造 AV 行業的關鍵因素。
下圖通過總結當前影響 AV 行業的一些關鍵 SAE 定義、硬件和軟件技術、立法和法規,幫助了解當前的 AV 格局。
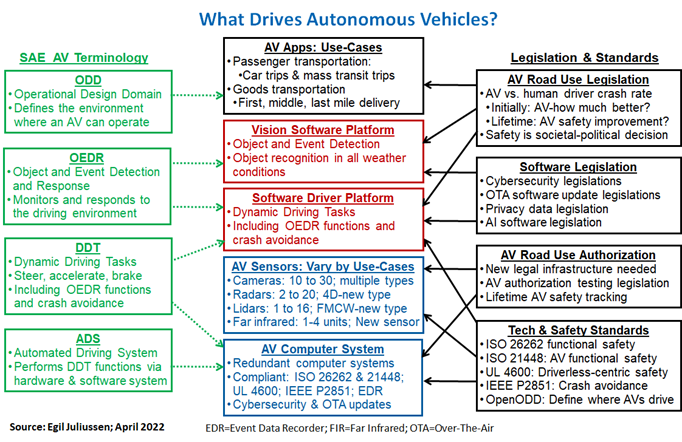
SAE AV 術語
SAE 術語是理解 AV的關鍵,因為它描述了每輛車必須具備的自主能力(部分或完全)。
運營設計域 (ODD):定義 AV 可以在哪里運行并指定用例,包括多種類型的客運和貨運。ODD 將針對每個用例和驅動細分市場有不同的規格。ODD 需要標準化工作(下文將進一步解釋)。
對象和事件檢測與響應 (OEDR):通過視覺和軟件驅動平臺監控和響應駕駛環境。
動態駕駛任務(DDT):由軟件驅動平臺完成的駕駛任務。這包括轉向、速度控制和制動。它還包括 OEDR 功能和最重要的功能 — 避免崩潰。
自動駕駛系統 (ADS):針對特定 ODD 持續執行整個 DDT 的硬件和軟件平臺。ADS 由 AV 計算機系統組成,包括 AV 傳感器系統和軟件驅動平臺。
視音頻用例
有兩個部分——客運和貨物運輸——每個部分都有多個類別。
在客運類別中,自動駕駛汽車必須取代或增加單車出行和/或公共交通系統出行。
用于叫車或自動駕駛出租車的AV目前是單車出行的主要細分市場和機會。最終,AV 軟件技術將發展到足以允許個人 AV 部署的程度。
固定路線的自動駕駛汽車是公共交通系統的主要部署選項。ISO 22737 低速自動駕駛 (LSAD) 標準對于固定路線的 AV 尤其重要。許多公共交通運營商正在探索為現有公交路線的固定路線自動駕駛汽車引入貨車和小型巴士。
在貨物運輸中,自動駕駛汽車必須替換或增加三類貨物交付:第一英里、中間和最后一英里運輸。
第一英里交付是指貨物運輸的第一階段。對于制造公司來說,這是從工廠到客戶倉庫的過程。對于零售商而言,第一英里是從大型倉庫到較小的本地倉庫或商店。一個關鍵特征是第一英里交付主要是州際或高速公路旅行。大型自動駕駛卡車是該細分市場的主要自動駕駛汽車。
中間一英里通常是從小型倉庫或配送中心到商店或履行中心,例如客戶取貨地點。中英里交付的高速公路或州際公路駕駛較少,導致速度較低和交通模式更加復雜。在如何使用第一英里和中間英里方面可能會有一些重疊。小型自動駕駛卡車或貨車是該細分市場的主要自動駕駛汽車。
最后一英里是從零售地點或履行中心運送到最終客戶的家中。該路線主要是低速路線,在大城市可能有復雜的交通模式。郊區交付是當今部署大多數測試和試驗的地方。已經為最后一英里交付開發了許多創新,包括人行道自動駕駛汽車和僅用于道路貨物的自動駕駛汽車。
軟件平臺
視覺軟件平臺基于傳感器數據完成事件檢測和物體檢測/識別。
軟件驅動平臺是最關鍵的元素,因為它必須完成所有 DDT 和 OEDR 功能。理想情況下,性能將完美無缺;然而,這還不可行。
硬件平臺
傳感器組合因用例而異,機器人出租車擁有多達 30 個攝像頭、20 個雷達傳感器、16 個光探測和測距(LiDAR) 傳感器以及遠紅外傳感器。
自動駕駛出租車的傳感器系統成本很高,主要是由于激光雷達的價格。到 2020 年,擁有價值 55,000 美元硬件和 30 個傳感器系統的 AV 將有多達 80% 的總硬件成本投資于傳感器技術。到 2025 年,雖然相同的硬件成本僅為 10,000 美元,但傳感器仍將占硬件總成本的 70%。
AV 硬件由計算機系統定義,需要不斷提升性能以滿足軟件驅動平臺日益增長的需求。冗余的計算機系統架構是防止系統故障的必要條件。
AV 計算機必須遵循下述新興技術和安全標準。這些計算機還必須符合必要的網絡安全和軟件立法和合規性規定。
立法和標準
隨著 AV 使用量的增加,需要新的立法和法規來確保那些使用和靠近 AV 的人的安全。
AV 道路使用立法:最困難的立法項目之一是定義 AV 道路使用和授權——本質上是定義誰可以使用 AV 以及允許他們在哪里使用它們。關鍵問題之一是在部署和 AV 生命周期內,與人類駕駛員相比,AV 必須要好多少。解決方案包括關于初始自動駕駛汽車安全水平與歷史人類駕駛員安全性的困難且有爭議的社會和政治決策。
軟件立法:軟件定義車輛的汽車軟件立法已經出現,但對于自動駕駛汽車來說將更加重要。網絡安全和 OTA 軟件更新立法已經通過。由于對改進 AV 軟件驅動程序平臺的廣泛跟蹤,由于詳細的數據可用性,隱私立法也被期待更多。
AV 道路使用授權:需要新的法律、基礎設施和 AV 安全跟蹤系統。一旦制定了 AV 道路立法,授權哪些 AV 安全通過并被允許上路的基礎設施將變得必要。然后,必須在其生命周期內跟蹤所有 AV 安全并通過 OTA 軟件更新進行升級。
技術和安全標準:ISO 26262 是在所有安全關鍵系統中大量使用的核心功能安全標準。
ISO 21448 將功能安全擴展到 AV。UL4600 將安全性擴展到 AV,無需人工干預。IEEE P2851 是一個正式的數學模型,它基于 Mobileye 技術應用技術中立的方法來避免崩潰。
德國 OpenODD 項目是描述 ODD 和定義 AV 可以在哪里行駛的未來標準。目標是創建一種機器可讀的格式來表示 ODD 規范。ODD 應該在 AV 的整個使用壽命期間都有效。
ODD 用于 AV 的功能規范。它指定了 AV 必須管理的靜態和動態環境參數。它們包括所有類型的交通參與者、天氣條件、基礎設施、位置、一天中的時間以及可能對駕駛情況產生影響的所有其他因素。
概括
AV 開發仍然是汽車和運輸行業的主要關注點。這個相對新興的垂直領域仍然需要正在進行的重大技術進步,即使它們的發展似乎比預期的要慢。
正如預期的那樣,管理自動駕駛汽車及其使用所需的立法和法規的發展速度比新技術的創建速度要慢。AV 行業正在推動許多國家的立法行動,最近取得了一些成功案例。世界上幾個國家的跡象表明,立法和安全法規將很快出臺。正如他們所做的那樣,預計 AV 行業將繼續增長。
審核編輯 黃昊宇
-
SAE
+關注
關注
0文章
27瀏覽量
13252 -
自動駕駛汽車
+關注
關注
4文章
376瀏覽量
40843
發布評論請先 登錄
相關推薦
MEMS技術在自動駕駛汽車中的應用
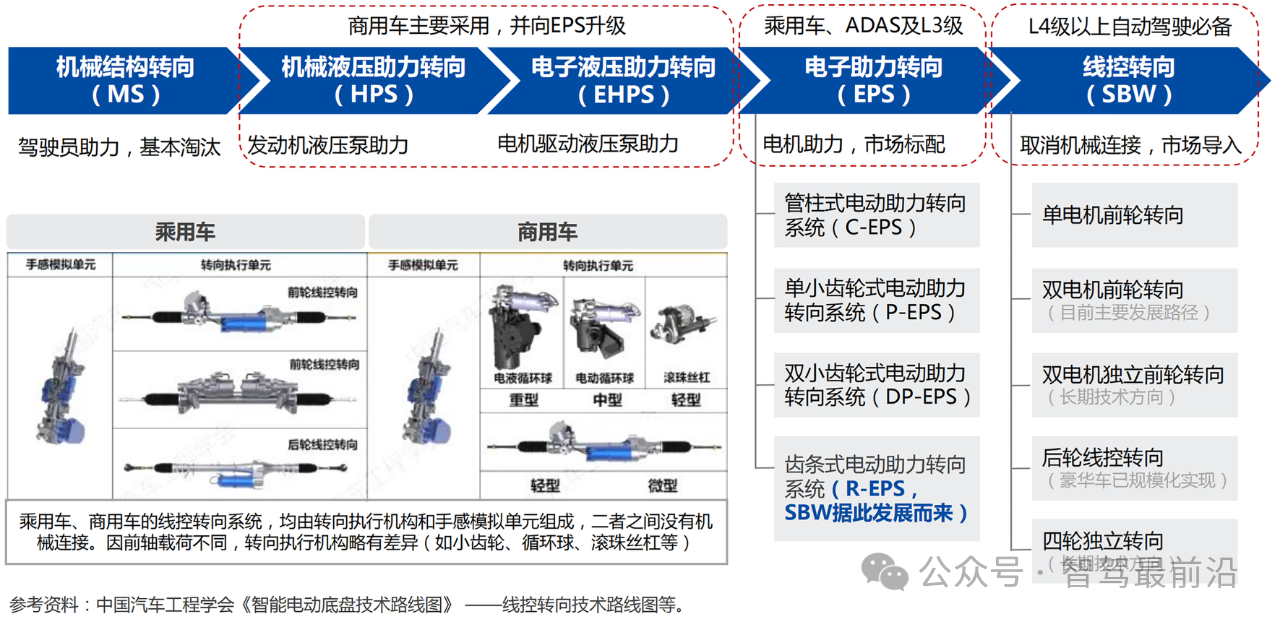
線控底盤,自動駕駛時代的基石?

自動駕駛技術的典型應用 自動駕駛技術涉及到哪些技術
美國擬禁止自動駕駛汽車使用中國軟件
FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
自動駕駛汽車如何識別障礙物
自動駕駛汽車傳感器有哪些
揭秘自動駕駛:未來汽車的感官革命,究竟需要哪些超級傳感器?
未來已來,多傳感器融合感知是自動駕駛破局的關鍵
大眾汽車和Mobileye加強自動駕駛合作

自動駕駛發展問題及解決方案淺析
Waymo自愿召回444輛自動駕駛汽車 L4的自動駕駛還有很多路要走






 工商網監
工商網監
評論