 為什么要對移動條件FB PSPS進行編程呢
為什么要對移動條件FB PSPS進行編程呢
對移動條件 FB ONL (僅當)進行編程:
應用移動條件是為了能有目的地讓機器人停機,例如出現故障情況或者在鎖閉的時候。
用此指令可編程設定機器人行駛的條件(布爾算子)。 在需要時,可對多個算子 (最多到 11 個)進行邏輯連接。 如果該機器人移動的條件不再能滿足,則機器人將停止。
移動條件 FB ONL 將在向目標點運動的過程中與 PLC 觸發器不同步地激活。并且保持激活狀態直至編定了新的移動條件 FB ONL或 FB PSPS 程序。
 ? ? ? ? ? ? ? ? ? ? ? ?
? ? ? ? ? ? ? ? ? ? ? ?
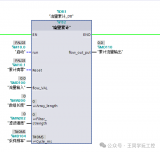
只要滿足下列條件,則機器人將一直移動:輸入端 100 為 TRUE。如果輸入端為 FALSE,則機器人將停止。
對移動條件 FB PSPS 進行編程:
應用移動條件是為了能有目的地讓機器人停機,例如出現故障情況或者在鎖閉的時候。
用此指令可編程設定機器人行駛的條件(布爾算子)。 在需要時,可對多個算子 (最多到 11 個)進行邏輯連接。 如果該機器人移動的條件不再能滿足,則機器人將停止。
移動條件 FB PSPS 將在目標點處激活,或在用 PLC 觸發器定義的到達目標點之前的一個時間點處激活。并且保持激活狀態直至編程設定了新的移動條件FBPSPS 或移動條件 FB ONL。
移動條件 FB PSPS 將覆蓋之前程序編定的移動條件 FB ONL.

只要滿足下列條件,則機器人將一直移動:輸入端 200 為 TRUE。如果輸入端為 FALSE,則機器人將停止。
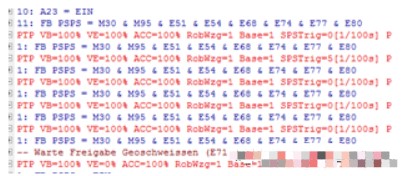
大眾程序中廣泛使用了FB PSPS,例如:
審核編輯:劉清
-
plc
+關注
關注
5012文章
13304瀏覽量
463545 -
可編程
+關注
關注
2文章
864瀏覽量
39831 -
觸發器
+關注
關注
14文章
2000瀏覽量
61166
原文標題:對移動條件 FB ONL 和FB SPS 進行編程
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
可編程交流電子負載各領域的作用
西門子流量累計FB塊介紹
百問FB網絡編程 - 網絡編程簡介
歐姆龍協作機器人TM25S可使用多種方法進行編程

請問一下TLV320aic33的驅動配置需要什么條件呢?
需要對兩個信號(10M的信號)進行去相位差的運算,如何消除或者補償電路對兩信號相位差的改變?
在使用示波器時,為什么要對探頭進行補償?
可編程晶振如何設置呢






 工商網監
工商網監
評論