 FM激光雷達的比較和設計權衡
FM激光雷達的比較和設計權衡
自動駕駛汽車傳感器堆棧對激光雷達的需求導致 2016 年至 2018 年間 OEM 的投資激增。70 多家公司獲得了總計超過 10 億美元的資金,用于將競爭性激光雷達方法推向市場。雖然這些技術賭注需要數年時間才能成熟為完整的產品,但供過于求已導致分析師和記者不斷猜測誰將成為贏家和輸家。
許多作者將光束掃描技術作為比較的主軸。給定的產品是機械的、固態的、MEMS 還是閃存?對這種技術差異化的關注可能是早期市場推動者積極承諾提供超低成本固態掃描激光雷達的痕跡。這種對掃描技術的關注分散了對更基本問題的討論:激光雷達如何測量距離?它可以測量速度嗎?并且——假設需要芯片組集成以實現汽車量的可擴展性——一種方法在規模上相對于另一種方法的影響是什么?
脈沖飛行時間或調幅“AM”激光雷達系統依賴于對反向散射激光脈沖的直接檢測。脈沖激光源的成本和性能各不相同。靈敏的光電探測器通過將反射的光功率直接轉換為電信號來測量飛行時間。這種方法只對目標的距離敏感,而不是它的速度。它還受到動態范圍有限的影響,這通常需要調制接收器增益。對于明亮的目標,增益會回撥,對于昏暗的目標,增益會增加。最終,這種增益調整游戲會限制性能并產生圖像偽影。
調頻連續波“FMCW”或“FM”激光雷達使用不同的方法來測量距離。頻率調制是一種借鑒現代雷達系統的測量技術。范圍信息不是直接測量脈沖飛行時間,而是在頻域中編碼。存在多種用于產生頻率調制激光信號的方法,其中許多方法非常適合低成本光子集成。這些傳感器中使用的相干接收器具有許多其他優點,包括抗干擾性和高靈敏度,下文將詳細討論。
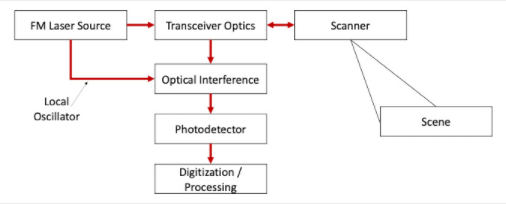
顯示了支持 FM 激光雷達相干檢測的基本干涉電路。
FM 激光雷達使用相干檢測通過將接收到的光與激光源的本地副本本地振蕩器 (LO) 進行光學組合來測量背反射電場。這種干涉過程在低成本、堅固的 PIN 光電二極管上產生電信號。與方向檢測相反,這些信號與接收到的電場與 LO 的乘積成正比。除了下面概述的優點外,這還可以實現高動態范圍測量,因為相干激光雷達光電探測器信號按背向反射信號功率的平方根縮放。
在 AM 和 FM 激光雷達中,光電探測器都會生成用于分析的時間序列數據。在 AM 的情況下,可以按時間順序分析時間序列,以挑選出返回的“光點”作為距離測量。在 FM 情況下,時間序列必須在測量期間進行緩沖,然后進行分析。存儲數百或數千個時域樣本,然后通過快速傅里葉變換轉換到頻域。然后在頻域中搜索返回的“峰值”。
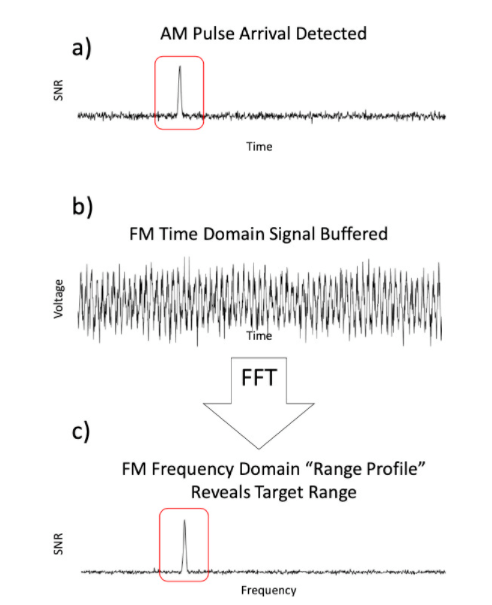
對 AM 系統的檢測器信號進行串行分析,因為樣本被數字化以檢測輸入脈沖。
在 FMCW 系統中,必須收集和緩沖時域樣本。
FFT 揭示了 FMCW 時域樣本的頻率內容。然后分析該頻域表示或“距離分布”以尋找表示目標距離和速度的峰值。
當來自任何激光雷達傳感器(FM 或 AM)的激光束與移動物體相互作用時,目標和傳感器之間的徑向運動會在反射光上產生多普勒頻移。AM 激光雷達的直接接收器測量反射脈沖,但不知道波長的微小變化。然而,在 FM 激光雷達的相干接收器中,這種多普勒頻移表現為反射信號和 LO 之間的可測量頻率差。因此,速度與點云中每個點的距離一起測量。這導致對具有微秒延遲的運動進行更自信的測量。AM 激光雷達系統必須處理多幀上的點云才能進行推斷運動。這將噪聲和延遲引入到運動估計中。雖然如上所述 FM 系統需要更多的前期信號處理,但對數據產品的后端處理較少,以使其對感知有用。推理被用來衡量。
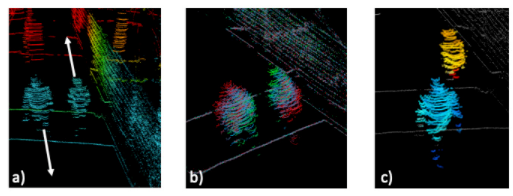
一組范圍彩色點顯示兩個行人并排。紅色較舊,綠色較新。
年齡顏色點的角度視圖顯示這些行人經過。行人的速度推導需要隨著時間的推移比較點來推斷運動。
單個 FM 激光雷達幀的多普勒彩色點顯示每個數據點上的行人速度。描繪了四肢和軀干運動。
激光雷達中的干擾效應包括太陽能或其他背景照明源以及激光雷達到激光雷達的效應。雖然激光雷達對激光雷達的影響具有值得商榷的意義,但陽光對激光雷達的影響不能僅僅作為“角落案例”而被忽視。應考慮在陽光條件下始終如一地運行激光雷達。然而,采用直接檢測的激光雷達傳感器在暴露在陽光下時會受到檢測器噪聲升高的影響。光學帶通濾波器提供了一些緩解,但是,在廣角和寬溫度范圍內的窄帶操作難以實現。一些陽光總是會到達光電探測器。在 AM 系統中,設計了高增益光電探測器對光敏感。這凸顯了太陽背景會提高光電二極管上的噪聲并限制范圍性能的問題。
在 FM 系統中,太陽背景可以到達光電探測器。然而,太陽輻射與 LO 不相干。因此,該信號不會在感興趣的 RF 頻帶內產生頻率響應,以提取距離和速度測量值。相干檢測過程可在沒有光學濾光片的直射陽光下實現穩定的性能。打個比方,FM 系統“調諧”到一個非常窄的頻道,不會“聽到”其他廣播電臺。
陽光——尤其是在日出或日落時——會嚴重限制相機和 AM 激光雷達的性能。這對自動駕駛汽車具有嚴重的安全影響。
如上所述,FM 信號等效于反射信號和 LO 電場的乘積。因此,更強的 LO 會產生更強的 FM 信號。這個過程是光放大的一種形式。這種能力的限制是由光電探測器上的 LO 驅動的“散粒噪聲”或“量子波動”。散粒噪聲受限的性能是單光子敏感。這在上述干擾抑制能力的背景下很重要。具有高選擇性的高靈敏度允許以非常低的光發射功率實現遠距離性能。由于高光功率,甚至是高峰值功率,對光子集成電路都是危險的,因此低功率能力可以實現 FM 激光雷達的芯片級集成。脈沖激光雷達系統,尤其是 1550nm 的激光雷達系統,有時在面對太陽干擾時利用大的光發射功率來實現遠距離性能。這種功率是由昂貴的激光放大器產生的,這些放大器沒有明顯的芯片級等效物。相比之下,FM 激光雷達利用可以以半導體格式產生的發射光功率。
相干檢測的“魔力”早已在國防部圈子中得到認可。然而,幾十年來,密集的信號處理將實際應用限制為昂貴的防御程序或緩慢的離線應用程序。所需的數據吞吐量和處理確實很重要。然而,用于電信和雷達信號處理的 FPGA 的最新進展使低成本 FM 激光雷達能夠用于自動駕駛感知。
每項激光雷達技術都面臨挑戰。但是 FM 激光雷達的處理要求以 AM 系統的硬件挑戰換取了有界的信號處理要求。用軟件增益代替硬件痛苦是一種強大的技術范式。
審核編輯:郭婷
-
太陽能
+關注
關注
37文章
3407瀏覽量
114222 -
激光
+關注
關注
19文章
3197瀏覽量
64462 -
探測器
+關注
關注
14文章
2637瀏覽量
73016
發布評論請先 登錄
相關推薦
激光雷達,明年要降價至200美元

激光雷達會傷害眼睛嗎?

激光雷達的維護與故障排查技巧
激光雷達技術的基于深度學習的進步
激光雷達技術的發展趨勢
激光雷達與其他傳感器的比較

光學雷達和激光雷達的區別是什么
一文看懂激光雷達

基于FPGA的激光雷達控制板

硅基片上激光雷達的測距原理

激光雷達的探測技術介紹 機載激光雷達發展歷程

華為詳細解讀激光雷達
激光雷達LIDAR基本工作原理






 工商網監
工商網監
評論