") 解讀5G通信時鐘同步技術(shù)
解讀5G通信時鐘同步技術(shù)
作者:Wofle Yu
前言
隨著大數(shù)據(jù)、云計算和物聯(lián)網(wǎng)時代的到來,通信系統(tǒng)從集中式系統(tǒng)向分布式系統(tǒng)發(fā)展,在集中式系統(tǒng)中,所有進程或模塊都從系統(tǒng)唯一的全局時鐘中獲取時間,系統(tǒng)內(nèi)任何兩個事件都有著明確的先后關(guān)系。
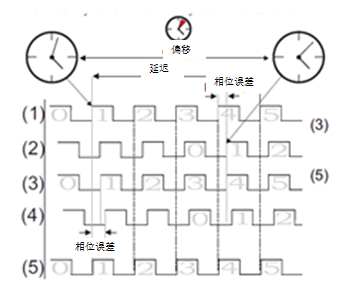
在分布式系統(tǒng)中,系統(tǒng)無法為彼此間相互獨立的模塊提供一個統(tǒng)一的全局時鐘。由于這些本地時鐘的計時速率、運行環(huán)境不一致,因此,在一段時間后,這些本地時鐘也會出現(xiàn)不一致。為了讓這些本地時鐘再次達到相同的時間值,必須進行時間同步操作。
技術(shù)型授權(quán)代理商Excelpoint世健公司的工程師Wolfe Yu,就5G通信時鐘同步的相關(guān)知識進行了解讀。
時鐘同步技術(shù)
系統(tǒng)中各時鐘的同步,需要對比各時鐘與系統(tǒng)標準時鐘的差值,以及對相對漂移做修正處理。比如,在GPS導(dǎo)航系統(tǒng)用戶設(shè)備中,我們一般通過調(diào)整1PPS信號前沿出現(xiàn)時刻,來做時鐘同步。還有一種就是通過以太網(wǎng)的時鐘恢復(fù)技術(shù)來做時鐘同步,這個技術(shù)稱為同步以太技術(shù),或者SyncE。當然,還有其他一些技術(shù),比如通過無線電波來傳播時間信息,不過這些傳輸方式只能實現(xiàn)同頻傳輸。
為了達到更高精度要求,有人提出了一種PTP的傳輸方式。后來,隨著5G技術(shù)的不斷提高,又提出采用SyncE+PTP相結(jié)合的方式。

GPS時鐘同步
GPS同步三維坐標理論
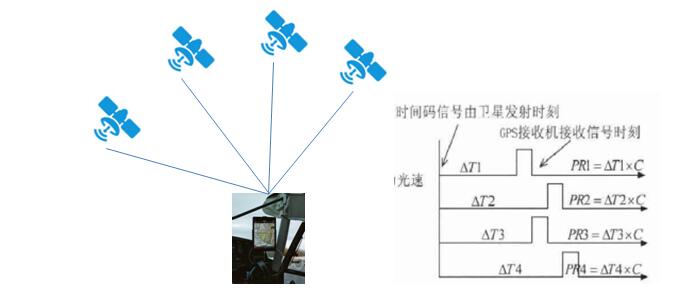
GPS系統(tǒng),利用工作衛(wèi)星確定接收機三維坐標,得到接收機的時鐘偏差,來進行授時。理論上來說,只要接收到4顆或者4顆以上工作衛(wèi)星,通過空間三維坐標公式,就可以準確地對其進行定位和授時,其坐標理論如下圖,具體推導(dǎo)過程不贅述。
GPS高穩(wěn)頻綜器系統(tǒng)原理
2004年, Nicholls和Carleton提出了著名的N/C系統(tǒng),N/C系統(tǒng)的核心技術(shù)是利用10MHz的OCXO同時接入一個分頻器和一個倍頻器,分別產(chǎn)生1pps和160MHz的信號,利用鎖相環(huán),實時校正OCXO的輸出頻率。

為了便于直觀分析,我們重構(gòu)系統(tǒng),GPS接收機產(chǎn)生1PPS輸出信號,和OCXO產(chǎn)生的10MHz分頻輸出1PPS信號,再通過10MHz倍頻160MHz的信號檢測相位偏移量,實現(xiàn)同步。
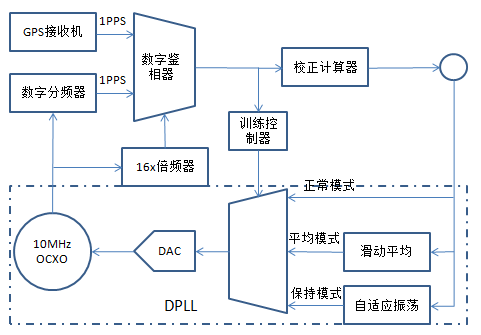
同步的本質(zhì),就是通過鎖相環(huán)來調(diào)整頻率和相位,數(shù)字鎖相環(huán)DPLL對數(shù)字電路噪聲容忍能力強、捕獲時間快、易于集成、可以提供復(fù)雜的處理算法。
數(shù)字鎖相環(huán)主要包括鑒相器、數(shù)字環(huán)路濾波、相位累加器、DA轉(zhuǎn)換等。鑒相器把本地估算信號和輸入信號做相位比較,產(chǎn)生對應(yīng)相位誤差序列,經(jīng)過環(huán)路濾波,產(chǎn)生相位控制字,調(diào)節(jié)相位,同時,頻率控制字調(diào)整頻率輸出。
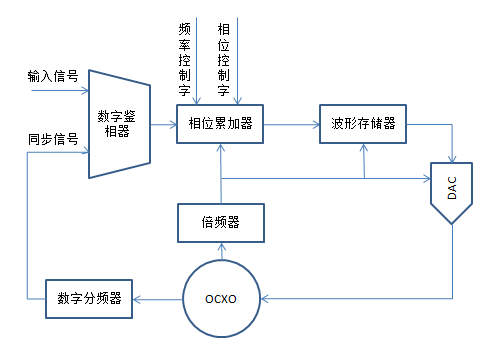
目前,大多數(shù)鎖相環(huán)采用一種基于DDS+PLL的結(jié)構(gòu),通過分別計算頻率控制字和相位控制字做調(diào)整,來實現(xiàn)快速鎖定相位和頻率。
SyncE時鐘同步
SyncE(同步以太網(wǎng))架構(gòu)
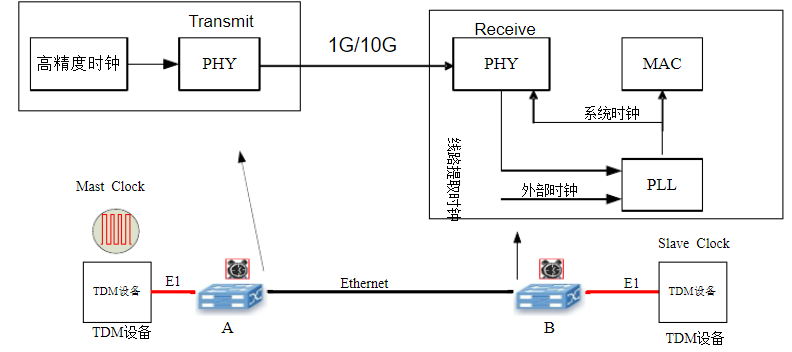
同步以太網(wǎng)技術(shù),是一種采用以太網(wǎng)鏈路碼流恢復(fù)時鐘頻率的技術(shù),簡稱SyncE,在以太網(wǎng)源端使用高精度時鐘,利用現(xiàn)有的以太網(wǎng)物理層接口PHY發(fā)送數(shù)據(jù),在接收端通過CDR恢復(fù)并提取該時鐘頻率,保持高精度時鐘性能,SyncE技術(shù)框圖如下:
CDR(時鐘數(shù)據(jù)恢復(fù))基本原理
以太網(wǎng)PHY層傳輸NRZ碼流,在傳輸側(cè),對碼流重新編碼成4B/5B、8B/10B、64B/66B碼,通過CDR(時鐘數(shù)據(jù)恢復(fù))可以完成時鐘和數(shù)據(jù)恢復(fù)。
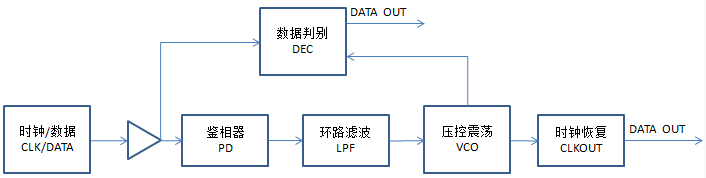
CDR原理大致如下:鑒頻環(huán)Coarse Loop完成頻率捕獲,鑒相環(huán)Fine Loop調(diào)整相位和恢復(fù)時鐘關(guān)系,恢復(fù)數(shù)據(jù)信號。
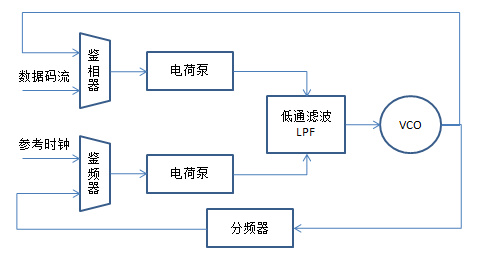
CDR電路主要分為:
雙環(huán)結(jié)構(gòu)CDR、 由鎖相環(huán)和延遲鎖相環(huán)組成,鎖相環(huán)提供所需頻率的低抖動正交時鐘,鎖相環(huán)將正交時鐘的相位調(diào)整為最佳采樣相位;
全數(shù)字化CDR、此電路采用全數(shù)字電路通過過采樣法實現(xiàn),功耗較低,但精度有限;
還有一種無參考時鐘CDR、此電路不需要提供片外參考時鐘,應(yīng)用靈活,但工作頻率范圍較小。
SyncE在時鐘同步中,表現(xiàn)出了非常出色的頻率跟蹤作用,但是SyncE在時鐘傳輸中無法判斷時鐘信號在線路上的傳輸延時。
精確時間協(xié)議PTP(Precision time protocol)演進
網(wǎng)絡(luò)時間同步協(xié)議NTP(Network time protocol)理論
PTP是由NTP演變過來的,我們先談?wù)凬TP網(wǎng)絡(luò)協(xié)議,從時鐘向主時鐘發(fā)送一個消息包,記錄發(fā)出消息包的從時間戳T1,主時鐘收到消息包立即記錄主時間戳T2,同時,主時鐘向從時鐘返回一個帶主時鐘時間戳T3的消息包,從時鐘收到返回消息包后,立刻記錄下從時鐘的時間戳T4。
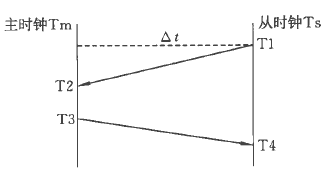
同時,我們假定雙向路徑對稱,即主到從或者從到主所用時間一致。基于以上,我們可以很輕松得出雙向路徑的傳送時間。
缺點:純軟件計算時間,需要組織報文傳輸,需要多次校準,報文傳輸存在不對稱,延時等可能,所以精度不高。
精確時間協(xié)議PTP(Precision time protocol)理論
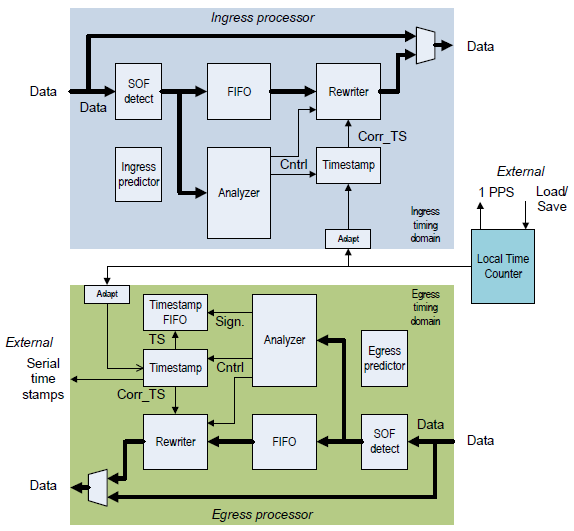
IEEE 1588 PTP協(xié)議是在NTP協(xié)議基礎(chǔ)上做了一些優(yōu)化,在硬件上要求每個網(wǎng)絡(luò)節(jié)點必須有一個包含實時時鐘的網(wǎng)絡(luò)接口卡來滿足時間戳要求。
IEEE 1588網(wǎng)絡(luò)時鐘主要分成普通時鐘OC(Ordinary clock)、邊界時鐘BC(Boundary clock),只有一個PTP通信端口的時鐘是普通時鐘,有多個PTP通信端口的時鐘是邊界時鐘,每個PTP端口獨立通信。理論上來說,我們首先確定一個最優(yōu)的時鐘作為該網(wǎng)主時鐘。PTP通過時戳單元(TSU)來標記主從時鐘時間戳,TSU同時監(jiān)測輸入輸出數(shù)據(jù)流,當識別到IEEE 1588 PTP數(shù)據(jù)包的前導(dǎo)碼時發(fā)布一個時間戳,用于精確標記PTP時間數(shù)據(jù)包的到達或者離開時間。
PTP協(xié)議基于純軟件同步數(shù)據(jù)包傳輸,PTP通信報文主要分為:同步報文Sync,跟隨報文Follow_up(備注:Follow_up message不是必須的,部分模式不需要,例如one-step模式),延遲請求報文Delay_Req,延遲應(yīng)答報文Delay_Resp和管理報文。
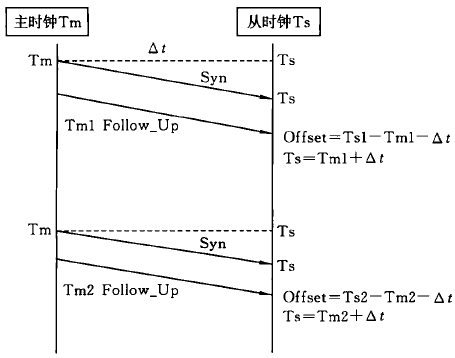
IEEE 1588 PTP協(xié)議時間偏差修正:
主時鐘向從時鐘發(fā)送Sync報文,并記錄發(fā)送時間tm1,同時啟動定時器,從時鐘收到該報文后,記錄接收時間ts1;
主時鐘接著發(fā)送攜帶tm1的Follow_up報文;
通過以上兩條信息,計算偏移時間Offset;
間隔時間主時鐘向從時鐘發(fā)送第二條Sync報文,并記錄發(fā)送時間tm2,從時鐘收到該報文后,記錄接收時間ts2;
主時鐘接著發(fā)送攜帶tm2的Follow_up報文;
通過以上偏移時間Offset,修正ts時間。
基于以上步奏,修正ts時間與tm時間一致。
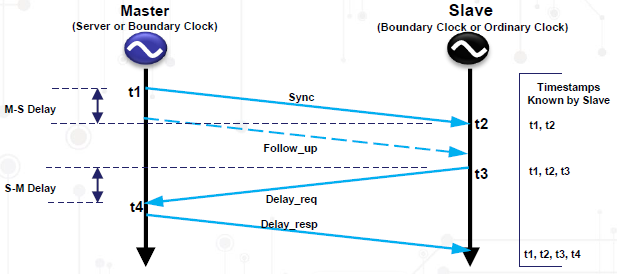
IEEE 1588 PTP協(xié)議延遲計算:
主時鐘向從時鐘發(fā)送Sync報文,并記錄發(fā)送時間t1,從時鐘收到該報文后,記錄接收時間t2;
主時鐘接著發(fā)送攜帶t1的Follow_up報文;
從時鐘向主時鐘發(fā)送Delay_req報文,用于發(fā)起反向傳輸延時的計算,并記錄發(fā)送時間t3,主時鐘收到該報文后,記錄接收時間t4;
主時鐘收到Delay_req報文之后,回復(fù)一個攜帶有t4的Delay_resp報文。
基于以上4個時間戳,由此可以計算出各時間延遲。
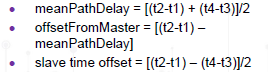
SyncE+PTP理論
IEEE 1588 PTP同步最基本的應(yīng)用前提就是必須建立在上下行鏈路時鐘頻率嚴格一致的基礎(chǔ)上,如果上下行鏈路時鐘不一直,那么時間同步的精度就會大打折扣。
利用SyncE,從設(shè)備通過以太網(wǎng)獲取主時鐘頻率,恢復(fù)出精準的時鐘頻率,協(xié)助PTP來實現(xiàn)相位對齊及時間同步。
Microchip解決方案
Excelpoint世健的工程師Wolfe Yu介紹:世健代理的Microchip旗下?lián)碛衂arlink、Maxim Timing & Sync BU、Micrel、Vectron、Vitesse、Actel等近60年歷史的完整時鐘方案提供商,可以給用戶提供交鑰匙方案。
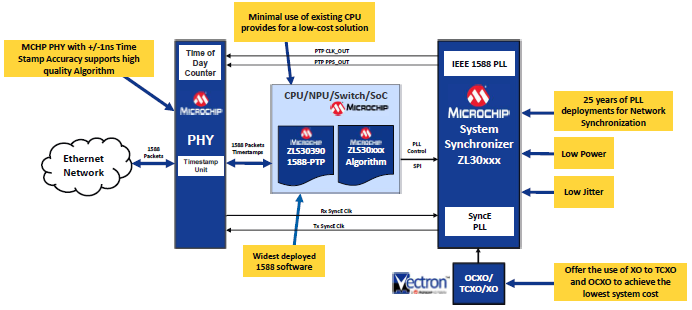
SyncE & IEEE 1588
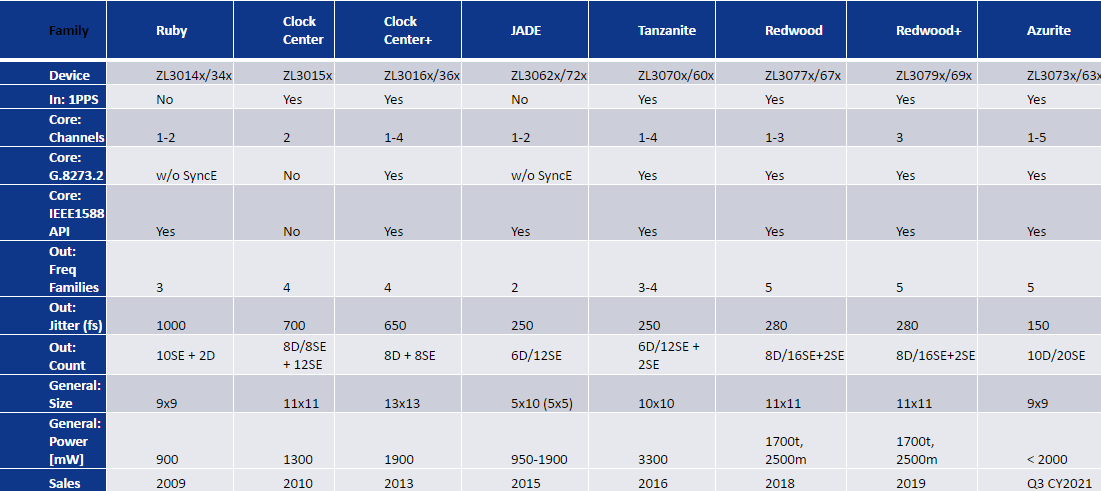
Microchip多種時間解決方案,產(chǎn)品涵蓋GPS、SyncE以及IEEE1588混合集中式系統(tǒng)以及精確時間系統(tǒng),可以滿足高中低檔不同組合的產(chǎn)品需求。
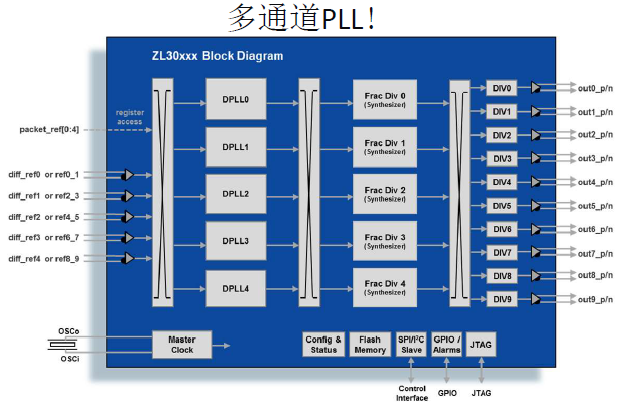
ZL30735主要特點
多達5路獨立通道DPLL;
3路NCO、分離XO、備用時鐘模式混合通道DPLL;
多通道Frac_N輸出分頻器;
每個通道支持任何頻率轉(zhuǎn)換;
多達10通道差分或者單端輸入,10通道差分或者20通道CMOS輸出;
滿足ITU-T G.8262, G.8262.1, G.813, G.812, Telcordia GR-1244, GR-253;
滿足ITU-T G.8261, G.8263, G.8273.2 (class A,B,C,D), G.8273.4;
嵌入式PPS;
抖動性能小于150 fs rms。
OCXO
恒溫晶體振蕩器簡稱恒溫晶振OCXO(Oven Controlled Crystal Oscillator),是利用恒溫槽使晶體振蕩器中石英晶體諧振器的溫度來保持恒定。OCXO是由恒溫槽控制電路和振蕩器電路構(gòu)成,通常人們是利用熱敏電阻“電橋”構(gòu)成的差動串聯(lián)放大器,來實現(xiàn)溫度控制。
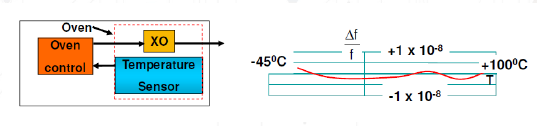
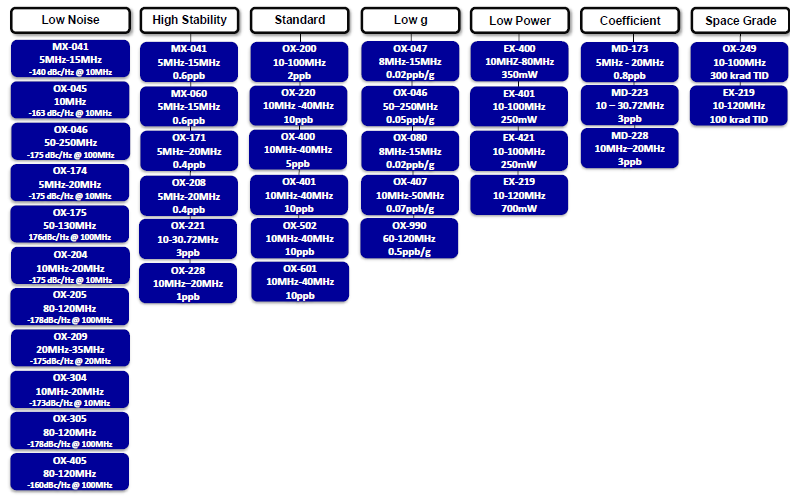
Microchip推出多種OCXO可以供客戶選擇,輸出頻率最高可達3GHz,溫度穩(wěn)定性可達0.15ppb,老化率可達20ppb。
VCXO
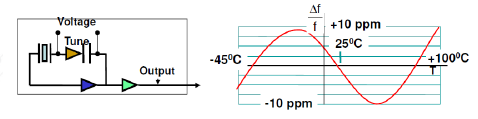
壓控振蕩器指輸出頻率與輸入控制電壓有對應(yīng)關(guān)系的振蕩電路(VCO),頻率是輸入信號電壓的函數(shù)的振蕩器VCO,振蕩器的工作狀態(tài)或振蕩回路的元件參數(shù)受輸入控制電壓的控制,就可構(gòu)成一個壓控振蕩器。
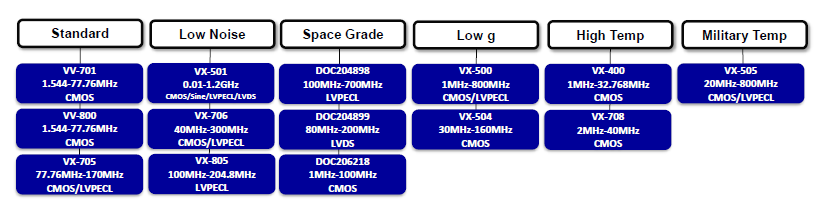
Microchip VCXO選型一覽:
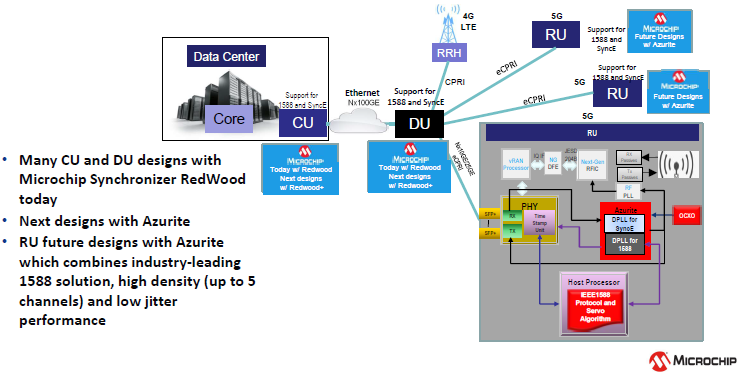
此外,Excelpoint世健可以提供基于Microchip集成IEEE1588、SyncE的PHY芯片和IP協(xié)議包的全套交鑰匙完整方案,助力5G小基站DU、RU及HUB,縮短客戶開發(fā)周期。
關(guān)于世健——亞太區(qū)領(lǐng)先的元器件授權(quán)代理商
世健是完整解決方案的供應(yīng)商,為亞洲電子廠商包括原設(shè)備生產(chǎn)商(OEM)、原設(shè)計生產(chǎn)商(ODM)和電子制造服務(wù)提供商(EMS)提供優(yōu)質(zhì)的元器件、工程設(shè)計及供應(yīng)鏈管理服務(wù)。世健與供應(yīng)商及電子廠商緊密協(xié)作,為新的科技與趨勢作出定位,并幫助客戶把這些最先進的科技揉合于他們的產(chǎn)品當中。集團分別在新加坡、中國及越南設(shè)有研發(fā)中心,專業(yè)的研發(fā)團隊不斷創(chuàng)造新的解決方案,幫助客戶提高成本效益并縮短產(chǎn)品上市時間。世健研發(fā)的完整解決方案及參考設(shè)計可應(yīng)用于工業(yè)、無線通信及消費電子等領(lǐng)域。世健是新加坡的主板上市公司,總部設(shè)于新加坡,擁有約650名員工,業(yè)務(wù)范圍已擴展至亞太區(qū)40多個城市和地區(qū),遍及新加坡、馬來西亞、泰國、越南、中國、印度、印度尼西亞、菲律賓及澳大利亞等十多個國家。世健集團在2020年的年營業(yè)額超過11億美元。1993年,世健在香港設(shè)立區(qū)域總部——世健系統(tǒng)(香港)有限公司,正式開始發(fā)展中國業(yè)務(wù)。目前,世健在中國擁有十多家分公司和辦事處,遍及中國主要大中型城市。憑借專業(yè)的研發(fā)團隊、頂尖的現(xiàn)場應(yīng)用支持以及豐富的市場經(jīng)驗,世健在中國業(yè)內(nèi)享有領(lǐng)先地位。
審核編輯:湯梓紅
-
gps
+關(guān)注
關(guān)注
22文章
2894瀏覽量
166183 -
物聯(lián)網(wǎng)
+關(guān)注
關(guān)注
2909文章
44557瀏覽量
372790 -
時鐘同步
+關(guān)注
關(guān)注
0文章
87瀏覽量
12761 -
5G
+關(guān)注
關(guān)注
1354文章
48436瀏覽量
563969
發(fā)布評論請先 登錄
相關(guān)推薦
擁抱大數(shù)據(jù)時代 解讀5G通信時鐘同步技術(shù)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論