 蔚來汽車規劃中的下一代電子電氣架構
蔚來汽車規劃中的下一代電子電氣架構
最近蔚來做了一份《NIO區域控制器架構與多控制器軟件融合的思考》,這也是未來第一次在技術論壇上透露自己的下一代電子電氣架構。蔚來汽車升級EEA架構主要的目的,是跟上目前智能汽車迭代的浪潮,實現軟件復用、快速迭代、快速靈活部署、軟件平臺化、代碼高內聚低耦合。
嚴格來看,大部分車輛的高智能化,是為了實現硬件系統平臺具備能收取軟件費用,不斷把車輛硬件價格平臺化,往價格往下走,但是可以讓消費者選擇是否購買增值的新軟件。
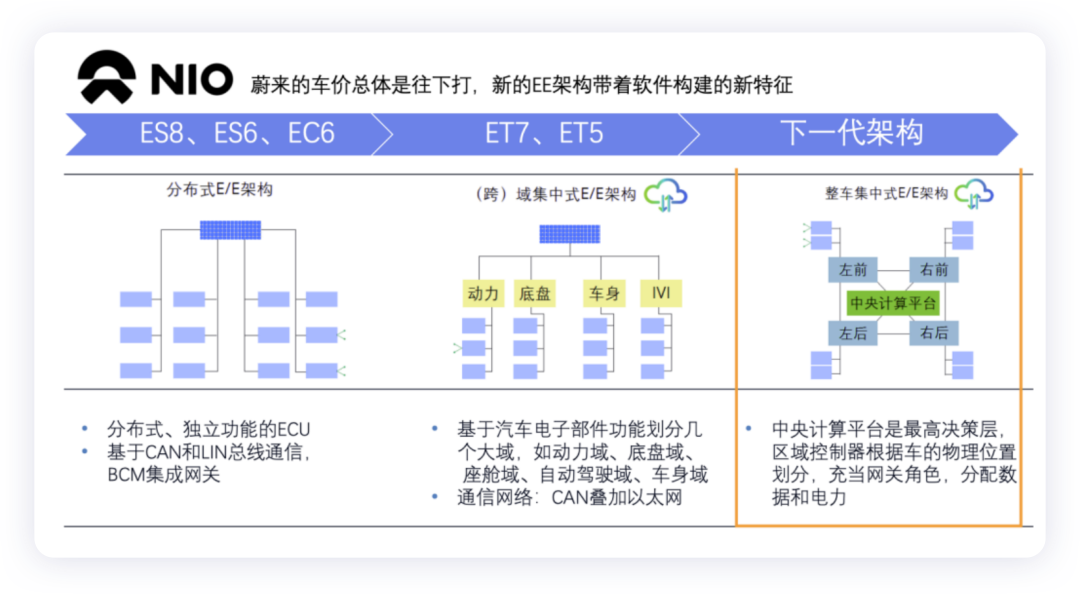
▲圖1.蔚來汽車的總體架構
Part 1
蔚來汽車規劃中的下一代電子電氣架構
與全球大部分整車企業一樣,蔚來汽車的工程師的選擇也是如出一轍的區域控制器架構,整個EEA系統由汽車中央計算單元、區域控制器,通過車載高速以太網進行連接,構建一套自適應和自學習系統,可以支持廣泛的智能互聯功能。
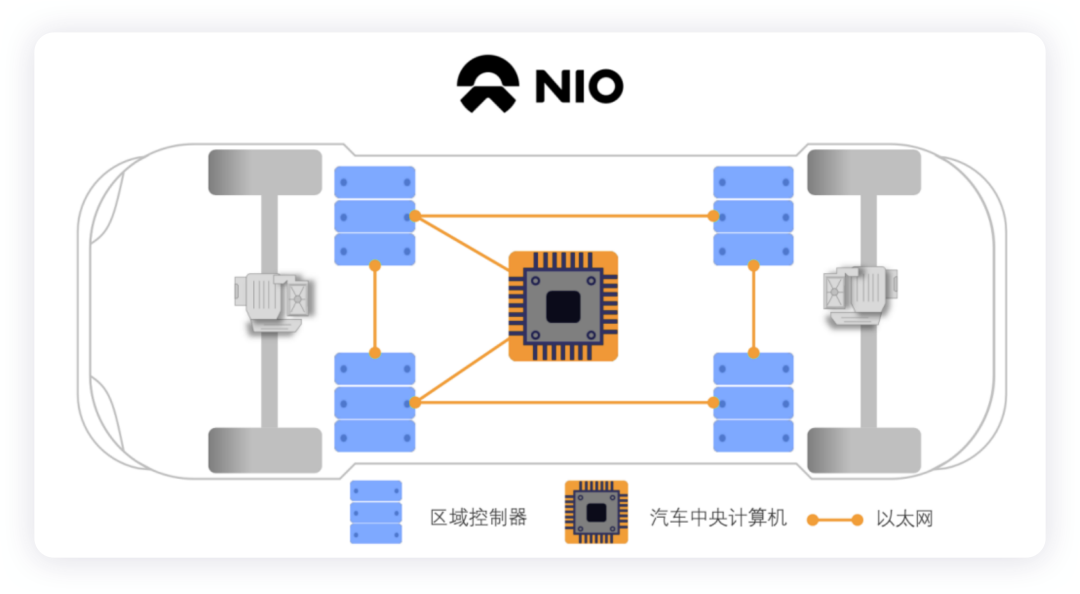
▲圖2.蔚來汽車的下一代區域架構
這種EEA架構通過環形拓撲,可以支持Fail Operation的冗余系統,有著很好的擴展性。蔚來的中央計算單元在性能上擁有1000TOPS以上的算力,主頻大于1GHz,這個給出的信息可能是現有的Adam的超算平臺,主控是英偉達的Orin芯片。
備注:這下一代系統至少也得在2023年底,2024年初出來,是否可以過渡到下一代平臺不清楚。
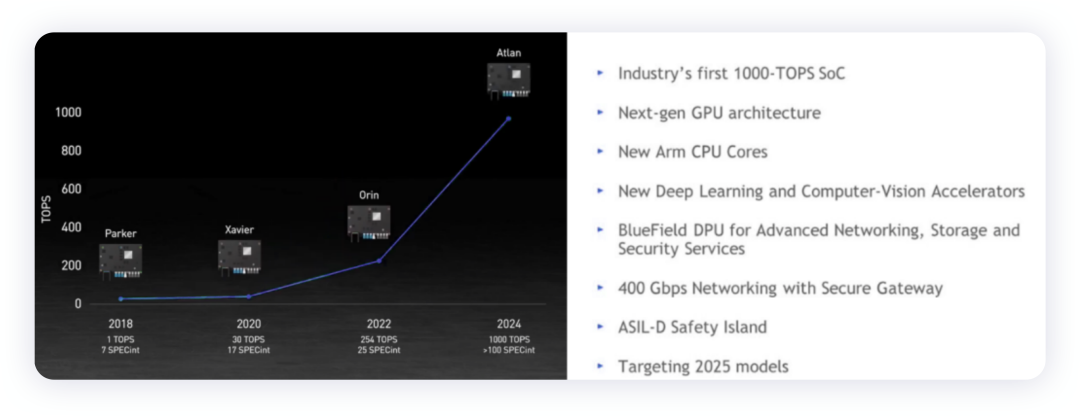
▲圖3.英偉達的SoC芯片
目前蔚來的Aquila系統,主要聚焦于自動輔助駕駛,由四個DRIVE Orin系統級芯片(SoC)構成,具有超過1000 TOPS的算力,兩個Orin芯片負責處理車輛傳感器的感知數據和自動輔助駕駛決策,一個Orin作為備份,實現功能安全,還有一個Orin支持本地訓練,通過車隊學習來改進。到了Atlan平臺,可能就整合座艙的系統了。
蔚來的區域控制器主要功能是:
●分布式邊緣計算框架
●車控仲裁中心:實現不同優先級的服務判斷,實現一定的信息安全處理
●區域集中式數據中心:通過以太網和CAN、LIN網絡來分發數據
●整車配電樞紐:這里會有很多E-fuse來配合分電
●獲取智能傳感器的數據和控制智能執行器的行為
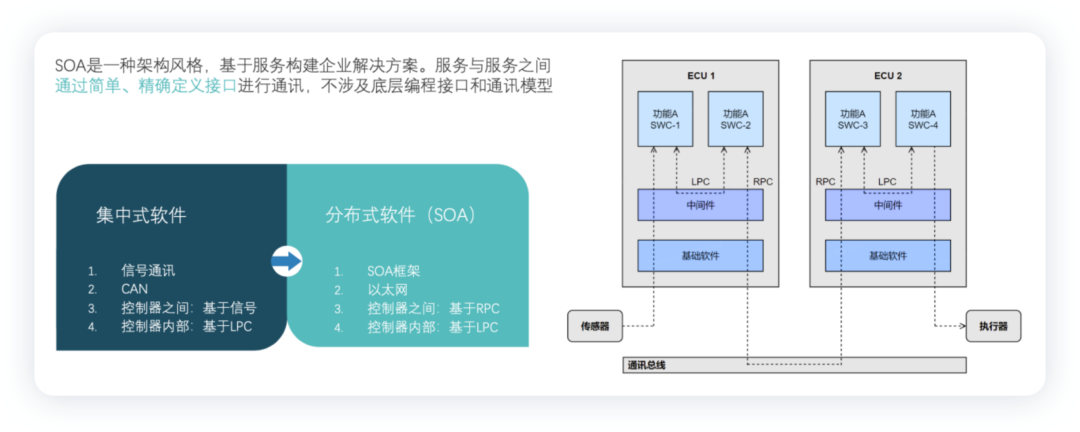
▲圖4.SOA基本是個分界線
實現智能汽車的基礎,是實現平臺化、高內聚低耦合、高重用性、靈活部署的特性,汽車軟件一定是面向服務的架構、廣泛的采用中間件。汽車軟件的開發調整,是對現有的軟件架構進行重構,引入遠程調用方式(RPC)。
Part 2
區域控制器基礎軟件的挑戰
實現跨域功能融合、跨域功能隔離,需要實現多核部署,對各種不同功能安全系統的功能進行隔離,比如轉向、底盤、動力總成的扭矩控制等。
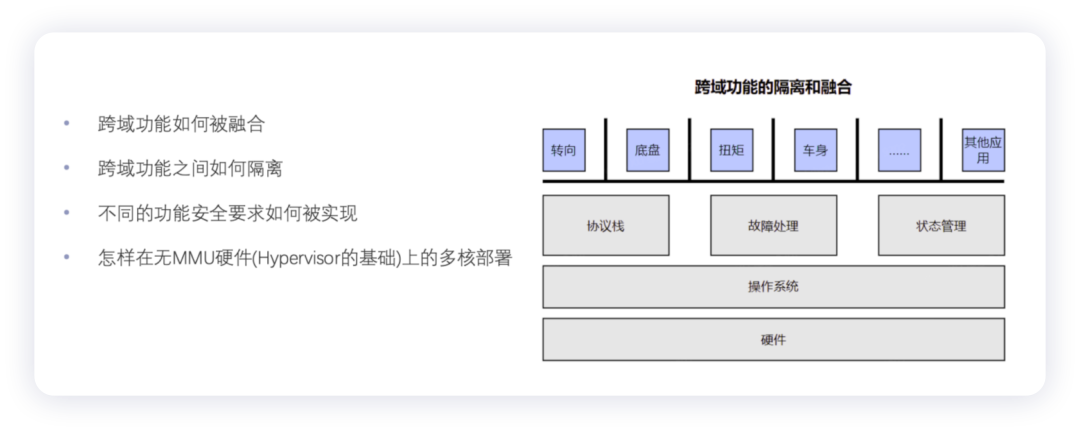
▲圖5.汽車中央汽車平臺帶來的融合挑戰
蔚來汽車在區域控制器上采用AMP多核架構,AMP模式的RTOS在各個CPU上均運行一個操作系統。
●優點:不需要MMU、運行開銷小,支持裸機系統、硬件資源靜態分配、支持異構和不同功能安全等級的系統融合。
●挑戰:多核任務的負載均衡、穩定的多核通信機制、啟動順序帶來的同步和安全問題,更復雜的功能安全考慮等。
這套架構還需要一個產品周期來迭代和試驗,我們也可以對比小鵬的G9的軟件和架構的完成度。
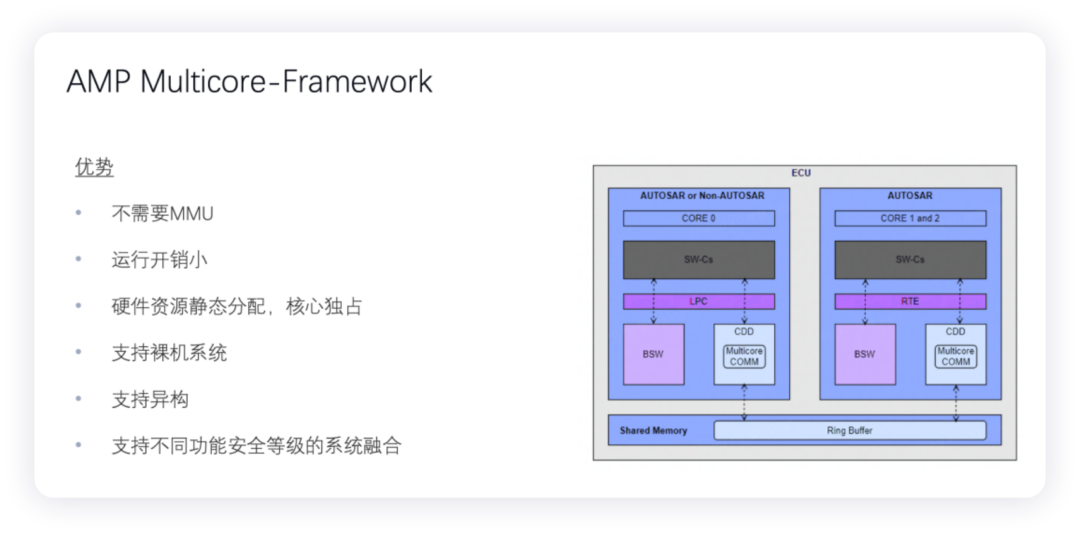
▲圖6.蔚來汽車使用的AMP模式
小結:2023年是新勢力車企和傳統主機廠導入新型EEA架構和SOA的時間節點,先進架構到底能否以成熟的軟件來支撐,這是目前最大的挑戰。
審核編輯 :李倩
-
控制器
+關注
關注
112文章
16335瀏覽量
177818 -
以太網
+關注
關注
40文章
5419瀏覽量
171612 -
蔚來
+關注
關注
1文章
471瀏覽量
14549
原文標題:蔚來開發中的下一代電子電氣架構
文章出處:【微信號:QCDZSJ,微信公眾號:汽車電子設計】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
意法半導體下一代汽車微控制器的戰略部署
西門子EDA發布下一代電子系統設計平臺
安森美將為大眾汽車集團的下一代電動汽車提供電源技術
德州儀器與臺達電子合作開發下一代電動汽車車載充電和電源解決方案
24芯M16插頭在下一代技術中的潛力

豐田、日產和本田將合作開發下一代汽車的AI和芯片
港燈打造了面向未來的下一代電力數據中心網絡
臺達推出提高人工智能服務器和數據中心能效的下一代電源解決方案
英偉達的下一代AI芯片

Wi-Fi 7將如何變革下一代汽車體驗
DesignCon2024 | 芯和半導體發布針對下一代電子系統的“SI/PI/多物理場分析”EDA解決方案






 工商網監
工商網監
評論