 如何利用DMX-512協議實現測試儀控制器的設計
如何利用DMX-512協議實現測試儀控制器的設計
通過DMX-512協議進行測試和燈光顯示的控制工具,非常適合對固定或臨時照明裝置進行快速測試。該項目源于需要有一個用于快速測試照明裝置的便攜式系統,而無需在外部、敵對或難以訪問的環境中安裝照明控制臺、接口或計算機。
硬件
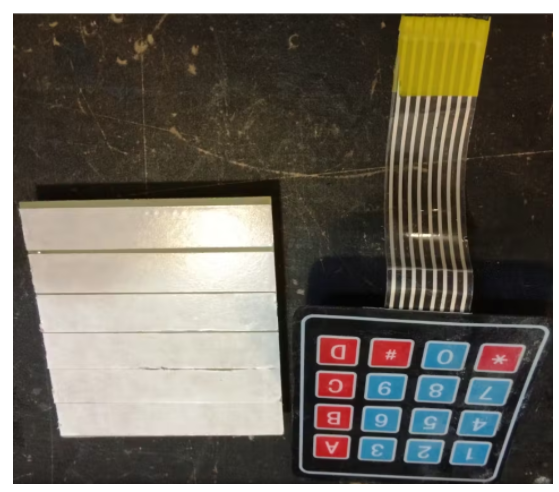
4x20 LCD 背光和對比度由軟件控制
導航鍵盤
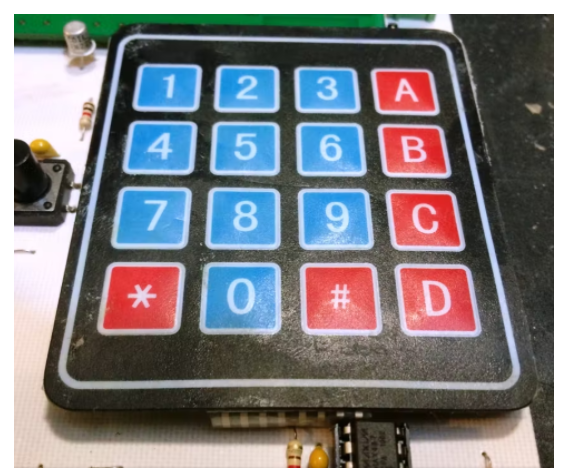
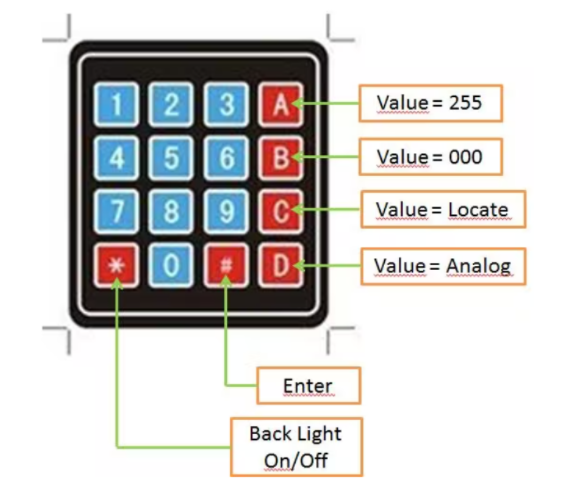
4x4 鍵盤
模擬控制電位器
開關機(不適用于USB電源)
來自接線端子、XLR 3 針和 5 針 XLR 的 DMX 輸出
輸出狀態 LED DMX
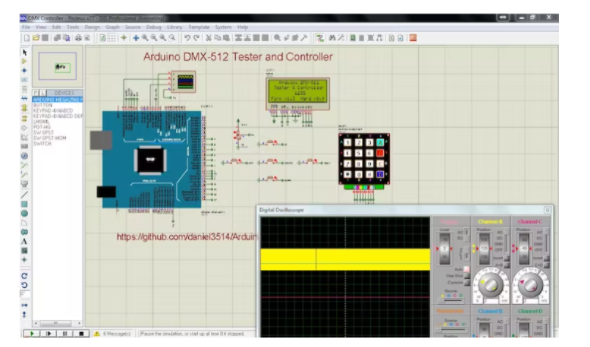
Proteus V7.7 SP2 中的模擬
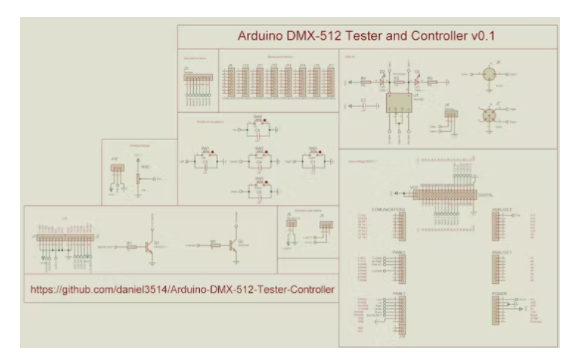
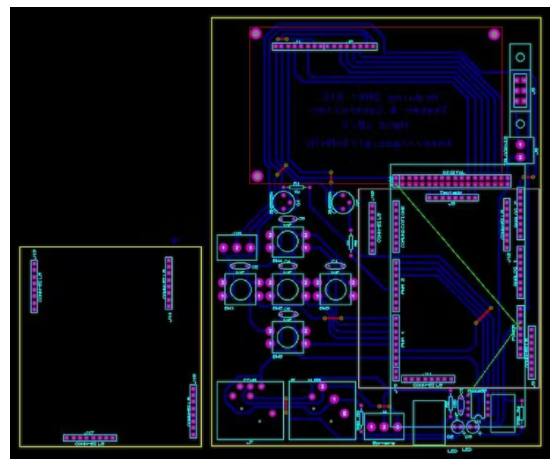
Proteus v8.0 SP1 中的原理圖和 PCB
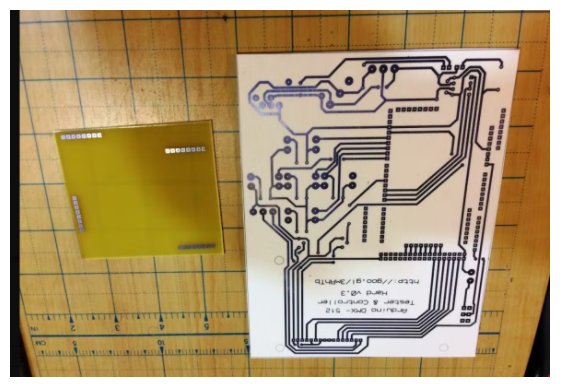
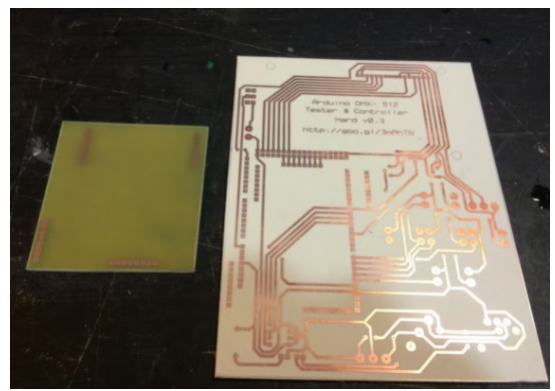
示意圖
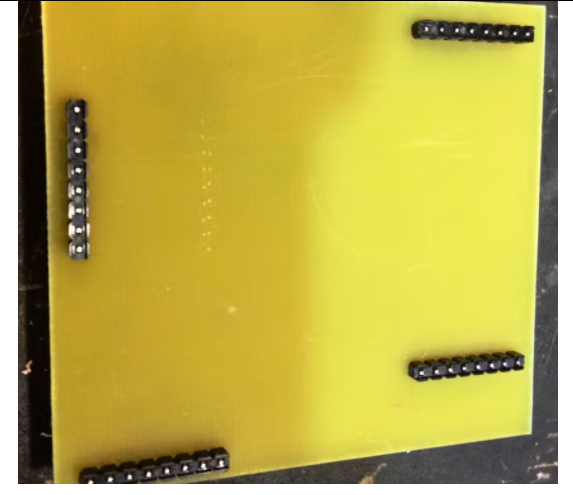
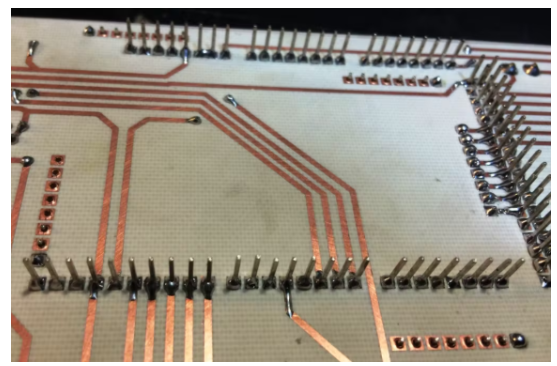
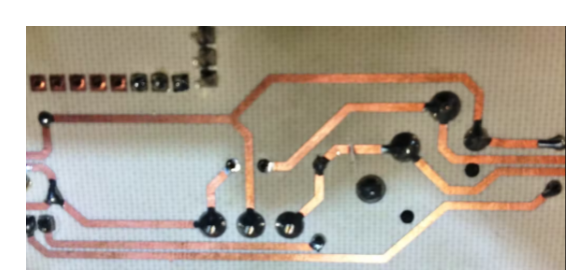
印刷電路板
使用酚醛板,加強銅砂紙水,循環變薄
使用 Proteus 發送文件以打印印前醋酸鹽底片(文件中有 PDF)
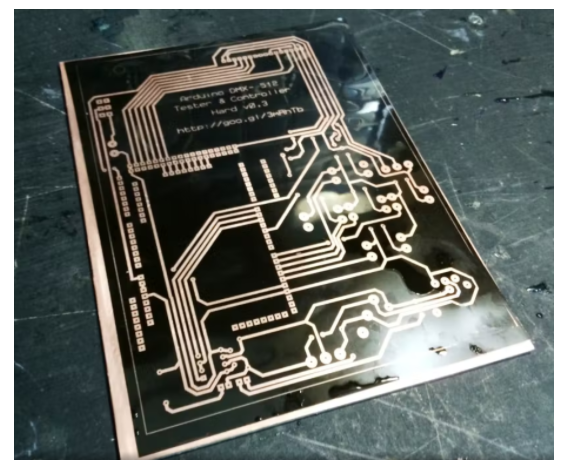
感光膠片的用途和方法

使用紙覆膜機薄膜完美粘附 pcb

在板和醋酸鹽之間加一點水,使其不會移動并施加紫外線

應用氯化鐵清潔并準備好
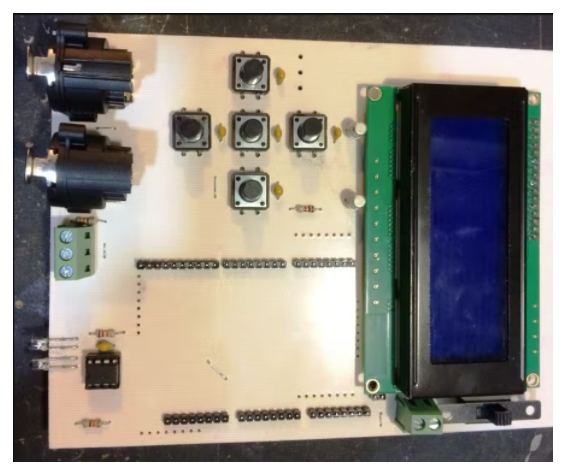
焊接元件
剝去電位器導軌
酚醛鉆孔板放置電位器
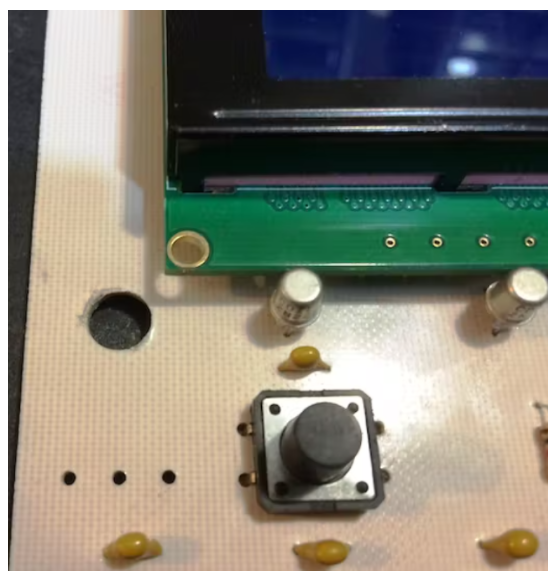
我們轉動旋鈕并將引腳焊接到焊盤上
將它們放在頂部焊接頂部,用砂紙和水切割的銷釘上方去除多余的
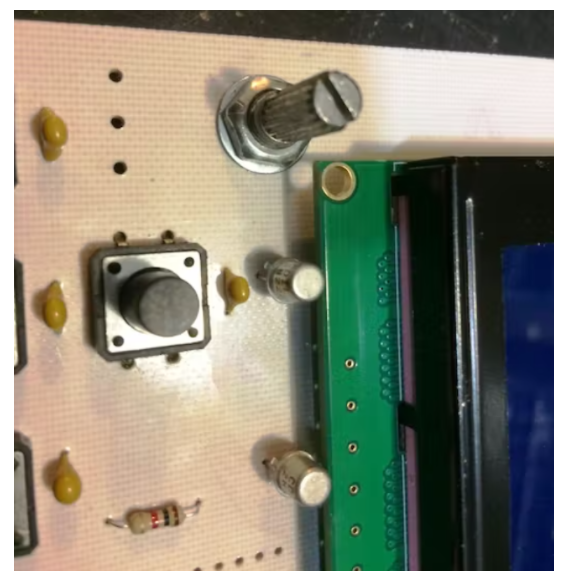
我們添加膠帶雙面膠帶將鍵盤連接到板上
在這里有一個細節,頭部被鍵盤的彎曲堵塞,切口

焊接鍵盤下方的接頭并向后彎曲以橫向連接鍵盤
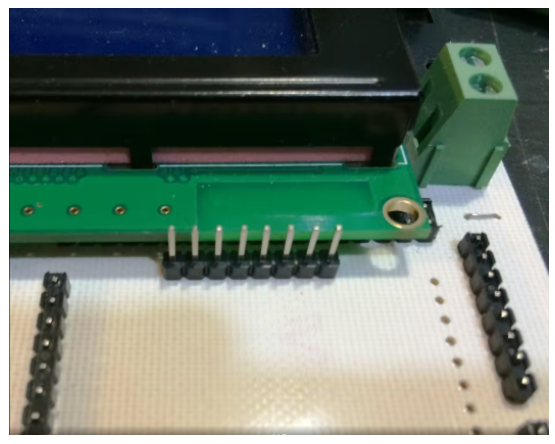
把鍵盤放在液晶板上,這里有一個細節,MAX485的底座和鍵盤很貼合
在 Arduino Mega 的 USB 端口上添加一些膠帶,以防止軌道之間發生短路
所有已安裝的組件
我們在 Arduino 上加載固件

代碼
// ***************************************************************************************************************************
// ***************************************************************************************************************************
// ** **
// ** Arduino DMX-512 Tester Controller **
// ** **
// ** - Firmware v0.6 **
// ** - Hardware v0.0 - v0.2 **
// ** **
// ** - Compilado en Arduino IDE v1.0.6 **
// ** http://www.arduino.cc/en/Main/OldSoftwareReleases **
// ** - Compilado para Arduino Mega 2560 R3 **
// ** http://www.arduino.cc/en/Main/ArduinoBoardMega2560 **
// ** - Libreria Arduino cuatro universos DMX v0.3 - Deskontrol.net **
// ** http://www.deskontrol.net/blog/libreria-arduino-cuatro-universos-dmx/) **
// ** - Libreria LCD v1.2.1 - Francisco Malpartida **
// ** https://bitbucket.org/fmalpartida/new-liquidcrystal/wiki/Home **
// ** - Simulacion en Proteus v7.7 SP2 **
// ** - Simulacion en Proteus de Arduino - Microcontrolandos **
// ** http://microcontrolandos.blogspot.mx/2012/12/arduino-componentes-para-o-proteus.html **
// ** **
// ** Autor: **
// ** **
// ** Daniel Roberto Becerril Angeles **
// ** daniel3514@gmail.com ** **
// ** https://github.com/daniel3514/Arduino-DMX-512-Tester-Controller/ **
// ** **
// ** Licenciamiento: **
// ** **
// ** GNU General Pubic Licence Version 3 **
// ** https://www.gnu.org/copyleft/gpl.html **
// ** **
// ***************************************************************************************************************************
// ***************************************************************************************************************************
null
// Librerias
#include // libreria para LCD
#include
#include
#include
#include // libreria DMX 4 universos deskontrol four universes DMX library - http://www.deskontrol.net/blog
// DMX Library
#define DMX512 (0) // (250 kbaud - 2 to 512 channels) Standard USITT DMX-512
//#define DMX1024 (1) // (500 kbaud - 2 to 1024 channels) Completely non standard - TESTED ok
//#define DMX2048 (2) // (1000 kbaud - 2 to 2048 channels) called by manufacturers DMX1000K, DMX 4x or DMX 1M ???
null
// Puertos, variables
// DMX
//int DMX_Data_Flux = 2; // control de flujo de datos para dmx, 0 por default
int DMX_Values [515]; // array de valores actuales DMX
int Canal_Actual = 1;
// Botones cursor
int Boton_Up = 51;
int Boton_Down = 45;
int Boton_Left = 53;
int Boton_Right = 49;
int Boton_Center = 47;
byte LCD_Col_Pos = 0; // posicion en tiempo real de lcd
byte LCD_Row_Pos = 0; // posicion en tiempo real de lcd
byte Cursor_Conf[4][20] = {{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0}, // config de posiciones de lcd Col Row
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0}};
// Botones Numerico Array
int Boton_Array_1 = 36;
int Boton_Array_2 = 34;
int Boton_Array_3 = 32;
int Boton_Array_4 = 30;
int Boton_Array_A = 44;
int Boton_Array_B = 42;
int Boton_Array_C = 40;
int Boton_Array_D = 38;
byte Boton_Calc = 17; // valor calculado # E * F, 17 sin valor calculado
byte Num_Col_Pos = 0; // posicion en tiempo real de lcd
byte Num_Row_Pos = 0; // posicion en tiempo real de lcd
int Num_Val = 0; // valor generado al calculo
long Boton_Delay_Teclado = 100; // delay de lectura de boton
// Potenciometro
int Pot = A15; // entrada de potenciometro
// LCD
int LCD_RS = 8; // puertos de conexion de LCD
int LCD_E = 9;
int LCD_D4 = 10;
int LCD_D5 = 11;
int LCD_D6 = 12;
int LCD_D7 = 13;
LiquidCrystal lcd(LCD_RS, LCD_E, LCD_D4, LCD_D5, LCD_D6, LCD_D7); //LCD setup
int Back_Light_PWM = 3; // salida para PWM de Back Light de LCD
int Contrast_PWM = 4; // salida para pwm de contraste de LCD
byte Back_Light_On_Off = 0; // saber si esta encendida o apagada
null
void setup()
{
// DMX
//pinMode(DMX_Data_Flux, OUTPUT);
// Botones cursor
pinMode(Boton_Up, INPUT_PULLUP);
pinMode(Boton_Down, INPUT_PULLUP);
pinMode(Boton_Left, INPUT_PULLUP);
pinMode(Boton_Right, INPUT_PULLUP);
pinMode(Boton_Center, INPUT_PULLUP);
// Botones numerico
pinMode(Boton_Array_1, OUTPUT);
pinMode(Boton_Array_2, OUTPUT);
pinMode(Boton_Array_3, OUTPUT);
pinMode(Boton_Array_4, OUTPUT);
pinMode(Boton_Array_A, INPUT_PULLUP);
pinMode(Boton_Array_B, INPUT_PULLUP);
pinMode(Boton_Array_C, INPUT_PULLUP);
pinMode(Boton_Array_D, INPUT_PULLUP);
digitalWrite(Boton_Array_1, HIGH);
digitalWrite(Boton_Array_2, HIGH);
digitalWrite(Boton_Array_3, HIGH);
digitalWrite(Boton_Array_4, HIGH);
// LCD
pinMode(LCD_RS, OUTPUT);
pinMode(LCD_E, OUTPUT);
pinMode(LCD_D7, OUTPUT);
pinMode(LCD_D6, OUTPUT);
pinMode(LCD_D5, OUTPUT);
pinMode(LCD_D4, OUTPUT);
pinMode(Back_Light_PWM, OUTPUT);
lcd.begin(20, 4); //tama?o de LCD
// DMX
ArduinoDmx0.set_tx_address(1); // poner aqui la direccion de inicio de DMX
ArduinoDmx0.set_tx_channels(512); // poner aqui el numero de canales a transmitir
ArduinoDmx0.init_tx(DMX512); // iniciar transmision universo 0, modo estandar DMX512
// no conectados
pinMode(5, OUTPUT);
digitalWrite(5, LOW);
pinMode(6, OUTPUT);
digitalWrite(6, LOW);
pinMode(7, OUTPUT);
digitalWrite(7, LOW);
pinMode(22, OUTPUT);
digitalWrite(22, LOW);
pinMode(23, OUTPUT);
digitalWrite(23, LOW);
pinMode(24, OUTPUT);
digitalWrite(24, LOW);
pinMode(25, OUTPUT);
digitalWrite(25, LOW);
pinMode(26, OUTPUT);
digitalWrite(26, LOW);
pinMode(27, OUTPUT);
digitalWrite(27, LOW);
pinMode(28, OUTPUT);
digitalWrite(28, LOW);
pinMode(29, OUTPUT);
digitalWrite(29, LOW);
pinMode(31, OUTPUT);
digitalWrite(31, LOW);
pinMode(33, OUTPUT);
digitalWrite(33, LOW);
pinMode(35, OUTPUT);
digitalWrite(35, LOW);
pinMode(37, OUTPUT);
digitalWrite(37, LOW);
pinMode(39, OUTPUT);
digitalWrite(39, LOW);
pinMode(41, OUTPUT);
digitalWrite(41, LOW);
pinMode(43, OUTPUT);
digitalWrite(43, LOW);
pinMode(46, OUTPUT);
digitalWrite(46, LOW);
pinMode(48, OUTPUT);
digitalWrite(48, LOW);
pinMode(50, OUTPUT);
digitalWrite(50, LOW);
pinMode(52, OUTPUT);
digitalWrite(52, LOW);
pinMode(A0, OUTPUT);
digitalWrite(A0, LOW);
pinMode(A1, OUTPUT);
digitalWrite(A1, LOW);
pinMode(A2, OUTPUT);
digitalWrite(A2, LOW);
pinMode(A3, OUTPUT);
digitalWrite(A3, LOW);
pinMode(A4, OUTPUT);
digitalWrite(A4, LOW);
pinMode(A5, OUTPUT);
digitalWrite(A5, LOW);
pinMode(A6, OUTPUT);
digitalWrite(A6, LOW);
pinMode(A7, OUTPUT);
digitalWrite(A7, LOW);
pinMode(A8, OUTPUT);
digitalWrite(A8, LOW);
pinMode(A9, OUTPUT);
digitalWrite(A9, LOW);
pinMode(A10, OUTPUT);
digitalWrite(A10, LOW);
pinMode(A11, OUTPUT);
digitalWrite(A11, LOW);
pinMode(A12, OUTPUT);
digitalWrite(A12, LOW);
pinMode(A13, OUTPUT);
digitalWrite(A13, LOW);
pinMode(A14, OUTPUT);
digitalWrite(A14, LOW);
}
null
void loop()
{
digitalWrite(2, HIGH); // max 485 como salida
Back_Light_Init();
Contrast_Init();
GUI_About();
GUI_Memory_Init();
}
null
void Back_Light_Init()
{
// ultimo estado del back light
byte Back_Light_Value = EEPROM.read(513);
analogWrite(Back_Light_PWM, Back_Light_Value);
if (Back_Light_Value == 0)
{
Back_Light_On_Off = 0;
}
if (Back_Light_Value > 0)
{
Back_Light_On_Off = 1;
}
}
void Contrast_Init()
{
// ultimo estado del comtrast
byte Contrast_Value = EEPROM.read(514);
analogWrite(Contrast_PWM, Contrast_Value);
}
void Back_Light_En()
{
byte Back_Light_Value = EEPROM.read(513); // lectura del ultimo valor desde la eeprom, 513 es donde se guarda el valor
// encender
if (Back_Light_On_Off == 0) // si esta apagada encenderla
{
if (Back_Light_Value == 0) // la encendemos de todos modos
{
analogWrite(Back_Light_PWM, 127); // aqui el valor a encender en el caso que se haya establecido apagado el back light
}
if (Back_Light_Value > 0)
{
analogWrite(Back_Light_PWM, Back_Light_Value); // encender con el valor de la eeprom
}
Back_Light_On_Off = 1;
goto salida;
}
// apagar
if (Back_Light_On_Off == 1) // si esta encendida apagarla
{
analogWrite(Back_Light_PWM, 0);
Back_Light_On_Off = 0;
}
salida:
{
delay(300); // para impedir repeticion del comando
}
}
void GUI_About()
{
byte Firm_Ver_Ent = 0;
byte Firm_Ver_Dec = 6;
byte Hard_Ver_Ent = 0;
byte Hard_Ver_Dec = 0;
byte ID = 20;
lcd.clear ();
lcd.noBlink(); // ocultar cursor
lcd.setCursor(0, 0);
for(int numero = 0; numero <= 512; numero ++)?? ?// efecto binario en lcd
{
lcd.print (numero, BIN);
}
lcd.clear ();
lcd.setCursor(0, 3);
lcd.print("http://goo.gl/kdYlj7");
lcd.setCursor(3, 0);
lcd.print("Arduino DMX-512");
lcd.setCursor(1, 1);
lcd.print("Tester & Controller");
// Firmware
lcd.setCursor(0, 2);
lcd.print("Firm v");
lcd.print(Firm_Ver_Ent);
lcd.print(".");
lcd.print(Firm_Ver_Dec);
// Hardware
lcd.setCursor(11, 2);
lcd.print("Hard v");
lcd.print(Hard_Ver_Ent);
lcd.print(".");
lcd.print(Hard_Ver_Dec);
delay(2000); //retardo de muestra de mensaje
}
null
void Multi_Matrix(int inicial)
{
// dibujar banco
Numerico_Write (inicial, 13, 0);
Numerico_Write (inicial + 14, 17, 0);
// matrix 1
Numerico_Write (DMX_Values[inicial], 1, 1);
Numerico_Write (DMX_Values[inicial + 1], 5, 1);
Numerico_Write (DMX_Values[inicial + 2], 9, 1);
Numerico_Write (DMX_Values[inicial + 3], 13, 1);
Numerico_Write (DMX_Values[inicial + 4], 17, 1);
// matrix 2
Numerico_Write (DMX_Values[inicial + 5], 1, 2);
Numerico_Write (DMX_Values[inicial + 6], 5, 2);
Numerico_Write (DMX_Values[inicial + 7], 9, 2);
Numerico_Write (DMX_Values[inicial + 8], 13, 2);
Numerico_Write (DMX_Values[inicial + 9], 17, 2);
// matrix 3
Numerico_Write (DMX_Values[inicial + 10], 1, 3);
Numerico_Write (DMX_Values[inicial + 11], 5, 3);
Numerico_Write (DMX_Values[inicial + 12], 9, 3);
Numerico_Write (DMX_Values[inicial + 13], 13, 3);
Numerico_Write (DMX_Values[inicial + 14], 17, 3);
}
void GUI_Control_Matrix()
{
int Inicial = 1;
Canal_Actual = 1;
inicio:
lcd.clear();
lcd.setCursor (0, 0);
lcd.print("c--- Mem Ctr -");
Multi_Matrix (Inicial);
// Cursor
LCD_Col_Pos = 12; // posicion de cursor
LCD_Row_Pos = 0; // posicion e cursor
// configuracion de cursor
Cursor_Conf_Clear(); // limpiar array
// Row 0
Cursor_Conf[0][4] = 1; // Memory
Cursor_Conf[0][8] = 1; // Unit
Cursor_Conf[0][12] = 1; // Banco Inicial
Cursor_Conf[0][16] = 1; // Banco Final
// Row 1
Cursor_Conf[1][0] = 1;
Cursor_Conf[1][4] = 1;
Cursor_Conf[1][8] = 1;
Cursor_Conf[1][12] = 1;
Cursor_Conf[1][16] = 1;
// Row 2
Cursor_Conf[2][0] = 1;
Cursor_Conf[2][4] = 1;
Cursor_Conf[2][8] = 1;
Cursor_Conf[2][12] = 1;
Cursor_Conf[2][16] = 1;
// Row 3
Cursor_Conf[3][0] = 1;
Cursor_Conf[3][4] = 1;
Cursor_Conf[3][8] = 1;
Cursor_Conf[3][12] = 1;
Cursor_Conf[3][16] = 1;
// navegar
Banco:
GUI_Navegar(1, Inicial);
// Acciones
// Memory
if (LCD_Col_Pos == 4 && LCD_Row_Pos == 0)
{
GUI_Memory();
goto inicio;
}
// Control
if (LCD_Col_Pos == 8 && LCD_Row_Pos == 0)
{
GUI_Control_Options();
goto inicio;
}
// Banco Inicial
if (LCD_Col_Pos == 12 && LCD_Row_Pos == 0)
{
Num_Row_Pos = 0;
Num_Col_Pos = 13;
Num_Val = Inicial; // para dejar el numero que estaba si no se cambia
Numerico_Calc(0);
if (Num_Val > 498) // limite de matriz
{
Num_Val = 498;
}
if (Num_Val == 0) // limite de matriz
{
Num_Val = 1;
}
Inicial = Num_Val;
goto inicio;
}
// Banco Final
if (LCD_Col_Pos == 16 && LCD_Row_Pos == 0)
{
Num_Row_Pos = 0;
Num_Col_Pos = 17;
if (Inicial == 1)
Num_Val = 15;
else
Num_Val = Inicial - 14; // para dejar el numero que estaba si no se cambia
Numerico_Calc(0);
if (Num_Val > 512) // limite de matriz
{
Inicial = 498;
goto inicio;
}
if (Num_Val < 15)?? ??? ?// limite de matriz
{
Inicial = 1;
goto inicio;
}
Inicial = Num_Val - 14;
goto inicio;
}
// posicion 1
if (LCD_Col_Pos == 0 && LCD_Row_Pos == 1)
{
Canal_Actual = Inicial;
goto Salida_DMX;
}
// posicion 2
if (LCD_Col_Pos == 4 && LCD_Row_Pos == 1)
{
Canal_Actual = Inicial + 1;
goto Salida_DMX;
}
// posicion 3
if (LCD_Col_Pos == 8 && LCD_Row_Pos == 1)
{
Canal_Actual = Inicial + 2;
goto Salida_DMX;
}
// posicion 4
if (LCD_Col_Pos == 12 && LCD_Row_Pos == 1)
{
Canal_Actual = Inicial + 3;
goto Salida_DMX;
}
// posicion 5
if (LCD_Col_Pos == 16 && LCD_Row_Pos == 1)
{
Canal_Actual = Inicial + 4;
goto Salida_DMX;
}
// posicion 6
if (LCD_Col_Pos == 0 && LCD_Row_Pos == 2)
{
Canal_Actual = Inicial + 5;
goto Salida_DMX;
}
// posicion 7
if (LCD_Col_Pos == 4 && LCD_Row_Pos == 2)
{
Canal_Actual = Inicial + 6;
goto Salida_DMX;
}
// posicion 8
if (LCD_Col_Pos == 8 && LCD_Row_Pos == 2)
{
Canal_Actual = Inicial + 7;
goto Salida_DMX;
}
// posicion 9
if (LCD_Col_Pos == 12 && LCD_Row_Pos == 2)
{
Canal_Actual = Inicial + 8;
goto Salida_DMX;
}
// posicion 10
if (LCD_Col_Pos == 16 && LCD_Row_Pos == 2)
{
Canal_Actual = Inicial + 9;
goto Salida_DMX;
}
// posicion 11
if (LCD_Col_Pos == 0 && LCD_Row_Pos == 3)
{
Canal_Actual = Inicial + 10;
goto Salida_DMX;
}
// posicion 12
if (LCD_Col_Pos == 4 && LCD_Row_Pos == 3)
{
Canal_Actual = Inicial + 11;
goto Salida_DMX;
}
// posicion 13
if (LCD_Col_Pos == 8 && LCD_Row_Pos == 3)
{
Canal_Actual = Inicial + 12;
goto Salida_DMX;
}
// posicion 14
if (LCD_Col_Pos == 12 && LCD_Row_Pos == 3)
{
Canal_Actual = Inicial + 13;
goto Salida_DMX;
}
// posicion 15
if (LCD_Col_Pos == 16 && LCD_Row_Pos == 3)
{
Canal_Actual = Inicial + 14;
goto Salida_DMX;
}
Salida_DMX:
Num_Row_Pos = LCD_Row_Pos;
Num_Col_Pos = LCD_Col_Pos + 1;
Num_Val = DMX_Values[Canal_Actual]; // para dejar el numero que estaba si no se cambia
Numerico_Calc(1);
if (Num_Val == 612) // ubicar
{
Ubicar();
Num_Col_Pos = Num_Col_Pos - 4;
}
if (Num_Val == 712) // analogo
{
Analog_Read_DMX(Num_Col_Pos - 2, Num_Row_Pos);
Num_Col_Pos = Num_Col_Pos - 4;
goto Banco;
}
if (Num_Val > 255)
{
Num_Val = 255;
Numerico_Write (255, Num_Col_Pos + 2, Num_Row_Pos);
}
ArduinoDmx0.TxBuffer[Canal_Actual - 1] = Num_Val;
DMX_Values[Canal_Actual] = Num_Val;
goto Banco;
}
void Cursor_Conf_Clear()
{
for (byte Conteo_Col = 0; Conteo_Col <= 19; Conteo_Col ++)
{
for (byte Conteo_Row = 0; Conteo_Row <= 3; Conteo_Row ++)
{
Cursor_Conf[Conteo_Row][Conteo_Col] = 0;
}
}
}
void GUI_Navegar(byte matrix, int banco)
{
long Boton_Delay_Cursor = 300; // delay de lectura de boton
byte LCD_Col_Pos_Ant; // saber el estado anterior para borrar cursor
byte LCD_Row_Pos_Ant; // saber el estado anterior para borrar cursor
// guardar valor anterior de row col
LCD_Col_Pos_Ant = LCD_Col_Pos;
LCD_Row_Pos_Ant = LCD_Row_Pos;
// Dibujar cursor
lcd.setCursor (LCD_Col_Pos, LCD_Row_Pos);
lcd.print(">");
// navegacion
Dibujar:
byte Dibujar_Cursor = 0; // saber si dibujar cursor para evitar repeticiones en lcd, 0 no dibujar, 1 dibujar >, 2 dibujar +
// LCD Back Light *
digitalWrite(Boton_Array_1, LOW); // lectura linea 1
if (digitalRead(Boton_Array_D) == LOW)
{
delay(Boton_Delay_Teclado);
Back_Light_En();
}
digitalWrite(Boton_Array_1, HIGH); // lectura linea 1
// Left
if (digitalRead(Boton_Left) == LOW)
{
delay (Boton_Delay_Cursor);
byte Salida_Left = 0;
byte LCD_Col_Pos_Temp = 0;
LCD_Col_Pos_Temp = LCD_Col_Pos;
while (Salida_Left == 0)
{
if (LCD_Col_Pos_Temp == 0)
{
LCD_Col_Pos_Temp = 20;
}
LCD_Col_Pos_Temp = LCD_Col_Pos_Temp - 1;
if (Cursor_Conf[LCD_Row_Pos][LCD_Col_Pos_Temp] == 1)
{
LCD_Col_Pos = LCD_Col_Pos_Temp;
Dibujar_Cursor = 1;
Salida_Left = 1;
}
}
goto Salida;
}
// Right
if (digitalRead(Boton_Right) == LOW)
{
delay(Boton_Delay_Cursor);
byte Salida_Right = 0;
byte LCD_Col_Pos_Temp = 0;
LCD_Col_Pos_Temp = LCD_Col_Pos;
while (Salida_Right == 0)
{
LCD_Col_Pos_Temp = LCD_Col_Pos_Temp + 1;
if (LCD_Col_Pos_Temp >= 20)
{
LCD_Col_Pos_Temp = 0; // regresar al cero
}
if (Cursor_Conf[LCD_Row_Pos][LCD_Col_Pos_Temp] == 1)
{
LCD_Col_Pos = LCD_Col_Pos_Temp;
Dibujar_Cursor = 1;
Salida_Right = 1;
}
}
goto Salida;
}
// Down
if (digitalRead(Boton_Down) == LOW)
{
delay(Boton_Delay_Cursor);
byte Salida_Down = 0;
byte LCD_Row_Pos_Temp = 0;
LCD_Row_Pos_Temp = LCD_Row_Pos;
while (Salida_Down == 0)
{
LCD_Row_Pos_Temp = LCD_Row_Pos_Temp + 1;
if (LCD_Row_Pos_Temp >= 4)
{
LCD_Row_Pos_Temp = 0; // regresar al cero
}
if (Cursor_Conf[LCD_Row_Pos_Temp][LCD_Col_Pos] == 1)
{
LCD_Row_Pos = LCD_Row_Pos_Temp;
Dibujar_Cursor = 1;
Salida_Down = 1;
}
}
goto Salida;
}
// Up
if (digitalRead(Boton_Up) == LOW)
{
delay(Boton_Delay_Cursor);
byte Salida_Up = 0;
byte LCD_Row_Pos_Temp;
LCD_Row_Pos_Temp = LCD_Row_Pos;
while (Salida_Up == 0)
{
if (LCD_Row_Pos_Temp <= 0)
{
LCD_Row_Pos_Temp = 4;
}
LCD_Row_Pos_Temp = LCD_Row_Pos_Temp - 1;
if (Cursor_Conf[LCD_Row_Pos_Temp][LCD_Col_Pos] == 1)
{
Dibujar_Cursor = 1;
LCD_Row_Pos = LCD_Row_Pos_Temp;
Salida_Up = 1;
}
}
goto Salida;
}
// Center
if (digitalRead(Boton_Center) == LOW)
{
delay(Boton_Delay_Cursor);
byte Salida_Center = 0;
while (Salida_Center == 0)
{
if (Cursor_Conf[LCD_Row_Pos][LCD_Col_Pos] == 1)
{
Dibujar_Cursor = 2; // dibujar +
Salida_Center = 1;
}
}
}
Salida:
// Dibujar Cursor
if (Dibujar_Cursor > 0)
{
if (Dibujar_Cursor == 1)
{
// borra el anterior
lcd.setCursor (LCD_Col_Pos_Ant, LCD_Row_Pos_Ant);
lcd.print(" ");
// escribir >
lcd.setCursor (LCD_Col_Pos, LCD_Row_Pos);
lcd.print(">");
// matrix print posicion
if (matrix == 1)
{
// banco inicial
if (LCD_Col_Pos == 12 && LCD_Row_Pos == 0)
{
lcd.setCursor(1, 0);
lcd.print("---");
goto salida;
}
// banco final
if (LCD_Col_Pos == 16 && LCD_Row_Pos == 0)
{
lcd.setCursor(1, 0);
lcd.print("---");
goto salir;
}
// Memory
if (LCD_Col_Pos == 4 && LCD_Row_Pos == 0)
{
lcd.setCursor(1, 0);
lcd.print("---");
goto salida;
}
// Unitary
if (LCD_Col_Pos == 8 && LCD_Row_Pos == 0)
{
lcd.setCursor(1, 0);
lcd.print("---");
goto salida;
}
// banco 1
if (LCD_Col_Pos == 0 && LCD_Row_Pos == 1)
{
Numerico_Write (banco, 1, 0);
goto salida;
}
// banco 2
if (LCD_Col_Pos == 4 && LCD_Row_Pos == 1)
{
Numerico_Write (banco + 1, 1, 0);
goto salida;
}
// banco 3
if (LCD_Col_Pos == 8 && LCD_Row_Pos == 1)
{
Numerico_Write (banco + 2, 1, 0);
goto salida;
}
// banco 4
if (LCD_Col_Pos == 12 && LCD_Row_Pos == 1)
{
Numerico_Write (banco + 3, 1, 0);
goto salida;
}
// banco 5
if (LCD_Col_Pos == 16 && LCD_Row_Pos == 1)
{
Numerico_Write (banco + 4, 1, 0);
goto salida;
}
// banco 6
if (LCD_Col_Pos == 0 && LCD_Row_Pos == 2)
{
Numerico_Write (banco + 5, 1, 0);
goto salida;
}
// banco 7
if (LCD_Col_Pos == 4 && LCD_Row_Pos == 2)
{
Numerico_Write (banco + 6, 1, 0);
goto salida;
}
// banco 8
if (LCD_Col_Pos == 8 && LCD_Row_Pos == 2)
{
Numerico_Write (banco + 7, 1, 0);
goto salida;
}
// banco 9
if (LCD_Col_Pos == 12 && LCD_Row_Pos == 2)
{
Numerico_Write (banco + 8, 1, 0);
goto salida;
}
// banco 10
if (LCD_Col_Pos == 16 && LCD_Row_Pos == 2)
{
Numerico_Write (banco + 9, 1, 0);
goto salida;
}
// banco 11
if (LCD_Col_Pos == 0 && LCD_Row_Pos == 3)
{
Numerico_Write (banco + 10, 1, 0);
goto salida;
}
// banco 12
if (LCD_Col_Pos == 4 && LCD_Row_Pos == 3)
{
Numerico_Write (banco + 11, 1, 0);
goto salida;
}
// banco 13
if (LCD_Col_Pos == 8 && LCD_Row_Pos == 3)
{
Numerico_Write (banco + 12, 1, 0);
goto salida;
}
// banco 14
if (LCD_Col_Pos == 12 && LCD_Row_Pos == 3)
{
Numerico_Write (banco + 13, 1, 0);
goto salida;
}
// banco 15
if (LCD_Col_Pos == 16 && LCD_Row_Pos == 3)
{
Numerico_Write (banco + 14, 1, 0);
goto salida;
}
// escribir guion de bancos
salida:
lcd.setCursor(16, 0);
lcd.print("-");
salir:
{}
}
}
else
{
// escribir +
lcd.setCursor (LCD_Col_Pos, LCD_Row_Pos);
lcd.print("+");
}
//salida
LCD_Col_Pos_Ant = LCD_Col_Pos;
LCD_Row_Pos_Ant = LCD_Row_Pos;
if (Dibujar_Cursor == 2)
{
goto Salir;
}
else
{
Dibujar_Cursor = 0;
}
}
goto Dibujar;
Salir: {}
}
null
void GUI_Memory_Init()
{
lcd.clear ();
// Texto
lcd.setCursor (0, 0);
lcd.print("Initial Memory:");
lcd.setCursor (2, 2);
lcd.print("Empty");
lcd.setCursor (9, 2);
lcd.print("Load");
lcd.setCursor (15, 2);
lcd.print("Clear");
// Cursor
LCD_Col_Pos = 1; // posicion de cursor
LCD_Row_Pos = 2;
// configuracion de cursor
Cursor_Conf_Clear(); // limpiar array
// Acciones
Cursor_Conf[2][1] = 1; // Empty
Cursor_Conf[2][8] = 1; // Load
Cursor_Conf[2][14] = 1; // Clear
// navegar
GUI_Navegar(0, 0);
// Acciones
// Load
if (LCD_Col_Pos == 8 && LCD_Row_Pos == 2)
{
EEPROM_Load();
GUI_Control_Options();
}
// Clear
if (LCD_Col_Pos == 14 && LCD_Row_Pos == 2)
{
EEPROM_Clear();
GUI_Control_Options();
}
// Empty
if (LCD_Col_Pos == 1 && LCD_Row_Pos == 2)
{
GUI_Control_Options();
}
}
void GUI_Memory()
{
lcd.clear ();
// Texto
lcd.setCursor (0, 0);
lcd.print("Memory Options:");
lcd.setCursor (1, 2);
lcd.print("Save");
lcd.setCursor (1, 3);
lcd.print("Load");
lcd.setCursor (7, 2);
lcd.print("Empty");
lcd.setCursor (7, 3);
lcd.print("Clear");
lcd.setCursor (14, 3);
lcd.print("Cancel");
// Cursor
LCD_Col_Pos = 0; // posicion de cursor
LCD_Row_Pos = 2;
// configuracion de cursor
Cursor_Conf_Clear(); // limpiar array
// Acciones
Cursor_Conf[2][0] = 1; // Save
Cursor_Conf[3][0] = 1; // Load
Cursor_Conf[3][6] = 1; // Clear
Cursor_Conf[2][6] = 1; // Empty
Cursor_Conf[3][13] = 1; // Cancel
// navegar
GUI_Navegar(0, 0);
// Acciones
// Load
if (LCD_Col_Pos == 0 && LCD_Row_Pos == 3)
{
EEPROM_Load();
}
// Clear
if (LCD_Col_Pos == 6 && LCD_Row_Pos == 3)
{
EEPROM_Clear();
}
// Save
if (LCD_Col_Pos == 0 && LCD_Row_Pos == 2)
{
EEPROM_Save();
}
// Empty
if (LCD_Col_Pos == 6 && LCD_Row_Pos == 2)
{
EEPROM_Empty();
}
// Cancel
if (LCD_Col_Pos == 3 && LCD_Row_Pos == 13)
{
null
}
}
null
void EEPROM_Save()
{
lcd.clear ();
lcd.setCursor (17, 1);
for(int Canal = 1; Canal <= 512; Canal ++)
{
EEPROM.write(Canal, DMX_Values[Canal]); // lectura desde EEPROM
lcd.print (Canal, BIN);
}
lcd.clear ();
lcd.setCursor (3, 1);
lcd.print ("Memory Saved!");
delay (1000);
}
void EEPROM_Load()
{
lcd.clear ();
lcd.setCursor (17, 1);
for(int Canal = 1; Canal <= 512; Canal ++)
{
DMX_Values[Canal] = EEPROM.read(Canal); // lectura desde EEPROM
ArduinoDmx0.TxBuffer[Canal - 1] = DMX_Values[Canal]; // salida a DMX
lcd.print (Canal, BIN);
}
lcd.clear ();
lcd.setCursor (3, 1);
lcd.print ("Memory Loaded!");
delay (1000);
}
void EEPROM_Empty()
{
lcd.clear ();
lcd.setCursor (17, 1);
for(int Canal = 0; Canal <= 512; Canal ++)
{
DMX_Values[Canal] = 0; // lectura desde EEPROM
ArduinoDmx0.TxBuffer[Canal] = 0; // salida a DMX
lcd.print (Canal, BIN);
}
lcd.clear ();
lcd.setCursor (3, 1);
lcd.print ("Memory Emptied!");
delay (1000);
}
void EEPROM_Clear()
{
lcd.clear ();
lcd.setCursor (17, 1);
for(int Canal = 0; Canal <= 512; Canal ++)
{
DMX_Values[Canal] = 0; // lectura desde EEPROM
ArduinoDmx0.TxBuffer[Canal] = 0; // salida a DMX
EEPROM.write (Canal, 0); // escritura EEPROM
lcd.print (Canal, BIN);
}
lcd.clear ();
lcd.setCursor (3, 1);
lcd.print ("Memory Cleaned!");
delay (1000);
}
void GUI_Control_Options()
{
iniciar:
// LCD
lcd.clear ();
lcd.setCursor (0, 0);
lcd.print ("Control Options:");
lcd.setCursor (2, 2);
lcd.print ("Unitary");
lcd.setCursor (2, 3);
lcd.print ("Matrix");
lcd.setCursor (12, 2);
lcd.print ("Chaser");
lcd.setCursor (12, 3);
lcd.print ("Multiply");
lcd.setCursor (12, 1);
lcd.print ("Config");
lcd.setCursor (2, 1);
lcd.print ("Memory");
// Cursor
LCD_Col_Pos = 1; // posicion de cursor
LCD_Row_Pos = 2;
// configuracion de cursor
Cursor_Conf_Clear(); // limpiar array
// Acciones
Cursor_Conf[2][1] = 1; // Unitary
Cursor_Conf[3][1] = 1; // Matrix
Cursor_Conf[2][11] = 1; // Chaser
Cursor_Conf[3][11] = 1; // Multiply
Cursor_Conf[1][11] = 1; // Config
Cursor_Conf[1][1] = 1; // Memory
// navegar
GUI_Navegar(0, 0);
// Acciones
// Unitary
if (LCD_Col_Pos == 1 && LCD_Row_Pos == 2)
{
GUI_Control_Unit();
}
// Matrix
if (LCD_Col_Pos == 1 && LCD_Row_Pos == 3)
{
GUI_Control_Matrix();
}
// Chaser
if (LCD_Col_Pos == 11 && LCD_Row_Pos == 2)
{
GUI_Control_Chaser();
}
// Multiply
if (LCD_Col_Pos == 11 && LCD_Row_Pos == 3)
{
GUI_Control_Multiply();
}
// Config
if (LCD_Col_Pos == 11 && LCD_Row_Pos == 1)
{
GUI_Config();
}
// Config
if (LCD_Col_Pos == 1 && LCD_Row_Pos == 1)
{
GUI_Memory();
goto iniciar;
}
}
null
void GUI_Config()
{
Inicio:
byte Back_Light_Value = EEPROM.read(513);
byte Contrast_Value = EEPROM.read(514);
// GUI
lcd.clear ();
lcd.setCursor (0, 0);
lcd.print ("LCD Config:");
lcd.setCursor (15, 0);
lcd.print ("About");
lcd.setCursor (3, 1);
lcd.print ("Back Light:");
Numerico_Write(Back_Light_Value, 15, 1);
lcd.setCursor (5, 2);
lcd.print ("Contrast:");
Numerico_Write(Contrast_Value, 15, 2);
lcd.setCursor (15, 3);
lcd.print ("Ctrl");
// Cursor
LCD_Col_Pos = 14; // posicion de cursor
LCD_Row_Pos = 2; // posicion e cursor
// configuracion de cursor
Cursor_Conf_Clear(); // limpiar array
// Cursores
Cursor_Conf[1][14] = 1; // Back Light Value
Cursor_Conf[2][14] = 1; // Contrast Value
Cursor_Conf[3][14] = 1; // control
Cursor_Conf[0][14] = 1; // About
// navegar
Navegacion:
GUI_Navegar(0, 0);
// Acciones
//Back Light Value
if (LCD_Col_Pos == 14 && LCD_Row_Pos == 1)
{
Num_Row_Pos = 1;
Num_Col_Pos = 15;
Numerico_Calc (1);
if (Num_Val == 712)
{
lcd.setCursor (14, 1);
lcd.print("a"); // indicar que es analogo
digitalWrite(Boton_Array_3, LOW); // lectura linea 3
lcd.blink();
while (digitalRead(Boton_Array_D) == HIGH && digitalRead(Boton_Center) == HIGH) // enter y center para paro
{
Num_Val = analogRead(Pot); // lectura desde el potenciometro
Num_Val = Num_Val / 4; // / 4 porque es de 12 bits
Numerico_Write(Num_Val, 15, 1);
analogWrite(Back_Light_PWM, Num_Val);
delay(50); // retardo de lectura
}
lcd.noBlink();
digitalWrite(Boton_Array_3, HIGH); // lectura linea 3
delay(300); // retraso para center
goto salida;
}
if (Num_Val > 255)
{
Num_Val = 255;
Numerico_Write (255, 15, 1);
}
analogWrite(Back_Light_PWM, Num_Val);
salida:
// mecanismo para on off Enable
if (Num_Val == 0)
{
Back_Light_On_Off = 0;
}
if (Num_Val > 0)
{
Back_Light_On_Off = 1;
}
EEPROM.write(513, Num_Val); // guardar valor nuevo
goto Navegacion;
}
//Contrast Value
if (LCD_Col_Pos == 14 && LCD_Row_Pos == 2)
{
Num_Row_Pos = 2;
Num_Col_Pos = 15;
Numerico_Calc (1);
if (Num_Val == 712)
{
lcd.setCursor (14, 2);
lcd.print("a"); // indicar que es analogo
digitalWrite(Boton_Array_3, LOW); // lectura linea 3
lcd.blink();
while (digitalRead(Boton_Array_D) == HIGH && digitalRead(Boton_Center) == HIGH) // enter y center para paro
{
Num_Val = analogRead(Pot); // lectura desde el potenciometro
Num_Val = Num_Val / 4; // / 4 porque es de 12 bits
if (Num_Val > 149) // limite menor de contraste LCD
{
Numerico_Write(Num_Val, 15, 2);
analogWrite(Contrast_PWM, Num_Val);
}
delay(50); // retardo de lectura
}
lcd.noBlink();
digitalWrite(Boton_Array_3, HIGH); // lectura linea 3
delay(300); // retraso para center
goto salir;
}
if (Num_Val > 255)
{
Num_Val = 255;
Numerico_Write (255, 15, 2);
}
if (Num_Val < 150)
{
Num_Val = 150; // limite menor de contraste LCD
Numerico_Write (150, 15, 2);
}
analogWrite(Contrast_PWM, Num_Val);
salir:
EEPROM.write(514, Num_Val); // guardar valor nuevo
goto Navegacion;
}
// Exit
if (LCD_Col_Pos == 14 && LCD_Row_Pos == 3)
{
GUI_Control_Options();
goto Navegacion;
}
// About
if (LCD_Col_Pos == 14 && LCD_Row_Pos == 0)
{
GUI_About();
while (digitalRead(Boton_Center) == HIGH)
{
// esperamos a que se precione enter
}
delay(300); // retardo para el rebote del boton
goto Inicio;
}
goto Navegacion;
}
null
void GUI_Control_Multiply()
{
int First_Channel = 1;
long Multiply = 0;
long Quantity = 0;
int Value = 255;
iniciar:
// LCD
lcd.clear ();
lcd.setCursor (3, 0);
lcd.print ("Value");
lcd.setCursor (0, 1);
lcd.print ("First CH Ctrl");
lcd.setCursor (0, 2);
lcd.print ("Multiply Memory");
lcd.setCursor (0, 3);
lcd.print ("Quantity Apply");
Numerico_Write (Value, 9, 0);
Numerico_Write (First_Channel, 9, 1);
Numerico_Write (Multiply, 9, 2);
Numerico_Write (Quantity, 9, 3);
// Cursor
LCD_Col_Pos = 8; // posicion de cursor
LCD_Row_Pos = 0;
Siguiente:
// configuracion de cursor
Cursor_Conf_Clear(); // limpiar array
// Acciones
Cursor_Conf[1][8] = 1; // first Channel
Cursor_Conf[3][8] = 1; // quantity
Cursor_Conf[2][8] = 1; // Multiply
Cursor_Conf[1][13] = 1; // control
Cursor_Conf[2][13] = 1; // Memory
Cursor_Conf[3][13] = 1; // apply
Cursor_Conf[0][8] = 1; // value
// navegar
GUI_Navegar(0, 0);
// Acciones
// Control
if (LCD_Col_Pos == 13 && LCD_Row_Pos == 1)
{
GUI_Control_Options();
}
// Memory
if (LCD_Col_Pos == 13 && LCD_Row_Pos == 2)
{
GUI_Memory();
goto iniciar;
}
// Apply
if (LCD_Col_Pos == 13 && LCD_Row_Pos == 3)
{
// Validar datos
long valid = Multiply * Quantity;
if (valid > 512) // si no es valido
{
lcd.setCursor(13, 0);
lcd.print("Error! ");
goto Siguiente;
}
// calcular
lcd.setCursor(13, 0);
lcd.print(" ");
long canal;
for (long conteo = 1; conteo <= Quantity; conteo++)
{
if (conteo == 1)
{
canal = First_Channel;
}
if (conteo != 1)
{
canal = canal + Multiply;
}
if (canal > 512)
{
canal = canal - Multiply;
conteo = Quantity;
}
lcd.setCursor(17, 0);
lcd.print(canal);
delay (5);
ArduinoDmx0.TxBuffer[canal - 1] = Value;
DMX_Values[canal] = Value;
}
lcd.setCursor(13, 0);
lcd.print("Ok!");
goto Siguiente;
}
// First Channel
if (LCD_Col_Pos == 8 && LCD_Row_Pos == 1)
{
Num_Row_Pos = 1;
Num_Col_Pos = 9;
Num_Val = First_Channel; // para dejar el numero que estaba si no se cambia
Numerico_Calc(0);
First_Channel = Num_Val;
if (First_Channel == 0)
{
First_Channel = 1;
Numerico_Write (First_Channel, 9, 1);
}
if (First_Channel > 512)
{
First_Channel = 512;
Numerico_Write (First_Channel, 9, 1);
}
}
// Multiply
if (LCD_Col_Pos == 8 && LCD_Row_Pos == 2)
{
Num_Row_Pos = 2;
Num_Col_Pos = 9;
Num_Val = Multiply; // para dejar el numero que estaba si no se cambia
Numerico_Calc(0);
Multiply = Num_Val;
if (Multiply == 0)
{
Multiply = 1;
Numerico_Write (Multiply, 9, 2);
}
if (Multiply > 512)
{
Multiply = 512;
Numerico_Write (Multiply, 9, 2);
}
}
// Quantity
if (LCD_Col_Pos == 8 && LCD_Row_Pos == 3)
{
Num_Row_Pos = 3;
Num_Col_Pos = 9;
Num_Val = Quantity; // para dejar el numero que estaba si no se cambia
Numerico_Calc(0);
Quantity = Num_Val;
if (Quantity == 0)
{
Quantity = 1;
Numerico_Write (Quantity, 9, 3);
}
if (Quantity > 512)
{
Quantity = 512;
Numerico_Write (Quantity, 9, 3);
}
}
// Value
if (LCD_Col_Pos == 8 && LCD_Row_Pos == 0)
{
Num_Row_Pos = 0;
Num_Col_Pos = 9;
Num_Val = Value; // para dejar el numero que estaba si no se cambia
Numerico_Calc(1);
Value = Num_Val;
if (Value > 255)
{
Value = 255;
Numerico_Write (Value, 9, 0);
}
}
goto Siguiente;
}
void GUI_Control_Chaser()
{
long Delay = 1;
long First = 1;
long Final = 0;
iniciar:
// LCD
lcd.clear ();
lcd.setCursor (0, 0);
lcd.print ("ChaserCH ---");
lcd.setCursor (3, 1);
lcd.print ("Delay x10=mS");
lcd.setCursor (0, 2);
lcd.print ("First CH Ctrl");
lcd.setCursor (0, 3);
lcd.print ("Final CH Start");
Numerico_Write (Delay, 9, 1);
Numerico_Write (First, 9, 2);
Numerico_Write (Final, 9, 3);
// Cursor
LCD_Col_Pos = 8; // posicion de cursor
LCD_Row_Pos = 1;
Siguiente:
// configuracion de cursor
Cursor_Conf_Clear(); // limpiar array
// Acciones
Cursor_Conf[1][8] = 1; // Delay
Cursor_Conf[2][8] = 1; // First
Cursor_Conf[3][8] = 1; // Final
Cursor_Conf[2][14] = 1; // control
Cursor_Conf[3][14] = 1; // Start
// navegar
GUI_Navegar(0, 0);
// Acciones
// Control
if (LCD_Col_Pos == 14 && LCD_Row_Pos == 2)
{
GUI_Control_Options();
}
// Start
if (LCD_Col_Pos == 14 && LCD_Row_Pos == 3)
{
long ciclo_longitud = 1300; // numero multiplicador aprox para 1 seg
long ciclo = 0;
long Delay_Cont = 0;
int canal = First;
lcd.setCursor(15,3);
lcd.print("Stop ");
// borrar canales previos
for(int Canales = 0; Canales <= 512; Canales ++)
{
DMX_Values[Canales] = 0; // lectura desde EEPROM
ArduinoDmx0.TxBuffer[Canales] = 0; // salida a DMX
}
while (digitalRead(Boton_Center) == HIGH) // lectura del boton centro
{
ciclo = ciclo + 1;
if (ciclo == ciclo_longitud)
{
Delay_Cont = Delay_Cont + 1;
if (Delay_Cont == Delay)
{
if (canal > Final)
{
canal = First;
}
Numerico_Write (canal, 9, 0);
// apagar lo anterior
for (long contar = First; contar <= Final; contar ++)
{
ArduinoDmx0.TxBuffer[contar - 1] = 0;
DMX_Values[contar] = 0;
}
// encender el siguiente
ArduinoDmx0.TxBuffer[canal - 1] = 255;
DMX_Values[canal] = 255;
Delay_Cont = 0;
canal = canal + 1;
}
ciclo = 0;
}
}
lcd.setCursor(15,3);
lcd.print("Start");
delay (300); // evita que le gane la descarga del capacitor
goto Siguiente;
}
// Delay
if (LCD_Col_Pos == 8 && LCD_Row_Pos == 1)
{
Num_Row_Pos = 1;
Num_Col_Pos = 9;
Num_Val = Delay; // para dejar el numero que estaba si no se cambia
Numerico_Calc(0);
Delay = Num_Val;
}
// First
if (LCD_Col_Pos == 8 && LCD_Row_Pos == 2)
{
Num_Row_Pos = 2;
Num_Col_Pos = 9;
Num_Val = First; // para dejar el numero que estaba si no se cambia
Numerico_Calc(0);
First = Num_Val;
if (First == 0)
{
First = 1;
Numerico_Write (First, 9, 2);
}
if (First > 512)
{
First = 512;
Numerico_Write (First, 9, 2);
}
}
// Final
if (LCD_Col_Pos == 8 && LCD_Row_Pos == 3)
{
Num_Row_Pos = 3;
Num_Col_Pos = 9;
Num_Val = Final; // para dejar el numero que estaba si no se cambia
Numerico_Calc(0);
Final = Num_Val;
if (Final == 0)
{
Final = 1;
Numerico_Write (Final, 9, 3);
}
if (Final > 512)
{
Final = 512;
Numerico_Write (Final, 9, 3);
}
}
goto Siguiente;
}
void Numerico_Write (int valor, int col, int row)
{
//posicionar el valor en los campos 000
lcd.setCursor (col, row);
lcd.print ("000");
if (valor < 10)
{
lcd.setCursor (col + 2, row);
}
if (valor > 9 && valor < 100)
{
lcd.setCursor (col + 1, row);
}
if (valor > 99)
{
lcd.setCursor (col, row);
}
lcd.print (valor);
}
void GUI_Control_Unit()
{
Inicio:
Canal_Actual = 1;
// GUI
lcd.clear ();
lcd.setCursor (0, 0);
lcd.print ("Unitary Control:");
lcd.setCursor (14, 2);
lcd.print ("Ctrl");
lcd.setCursor (14, 3);
lcd.print ("Memory");
lcd.setCursor (0, 2);
lcd.print ("Channel: 001");
lcd.setCursor (2, 3);
lcd.print ("Value:");
Numerico_Write(DMX_Values[1], 9, 3);
// Cursor
LCD_Col_Pos = 8; // posicion de cursor
LCD_Row_Pos = 2; // posicion e cursor
// configuracion de cursor
Cursor_Conf_Clear(); // limpiar array
// Cursores
Cursor_Conf[2][8] = 1; // Channel
Cursor_Conf[3][8] = 1; // Value
Cursor_Conf[2][13] = 1; // Control
Cursor_Conf[3][13] = 1; // Memory
// navegar
Navegacion:
GUI_Navegar(0, 0);
// Acciones
//Channel
if (LCD_Col_Pos == 8 && LCD_Row_Pos == 2)
{
Numerico_Write(Canal_Actual, 9, 2);
Num_Row_Pos = 2;
Num_Col_Pos = 9;
Num_Val = Canal_Actual; // para dejar el numero que estaba si no se cambia
Numerico_Calc (0);
if (Num_Val > 512)
{
Num_Val = 512;
Numerico_Write (512, 9, 2);
}
if (Num_Val < 1)
{
Num_Val = 1;
Numerico_Write (1, 9, 2);
}
// mostrar valor actual del canal
Canal_Actual = Num_Val;
Numerico_Write(DMX_Values[Canal_Actual], 9, 3);
}
// Value
if (LCD_Col_Pos == 8 && LCD_Row_Pos == 3)
{
Num_Row_Pos = 3;
Num_Col_Pos = 9;
Num_Val = DMX_Values[Canal_Actual]; // para dejar el numero que estaba si no se cambia
Numerico_Calc (1);
if (Num_Val == 612) // ubicar
{
Ubicar();
}
if (Num_Val == 712) // analogo
{
Analog_Read_DMX(9, 3);
goto Navegacion;
}
if (Num_Val > 255)
{
Num_Val = 255;
Numerico_Write (255, 9, 3);
}
// Escribr valor en dmx
ArduinoDmx0.TxBuffer[Canal_Actual - 1] = Num_Val;
DMX_Values[Canal_Actual] = Num_Val;
goto Navegacion;
}
// Memory
if (LCD_Col_Pos == 13 && LCD_Row_Pos == 3)
{
GUI_Memory();
goto Inicio;
}
// Control
if (LCD_Col_Pos == 13 && LCD_Row_Pos == 2)
{
GUI_Control_Options();
}
goto Navegacion;
}
void Ubicar()
{
digitalWrite(Boton_Array_4, LOW);
while (digitalRead(Boton_Array_C) == HIGH)
{
ArduinoDmx0.TxBuffer[Canal_Actual - 1] = 255;
Numerico_Write (255, Num_Col_Pos - 2, Num_Row_Pos);
delay (100);
ArduinoDmx0.TxBuffer[Canal_Actual - 1] = 0;
lcd.setCursor (Num_Col_Pos - 2, Num_Row_Pos);
lcd.print (" ");
delay (100);
}
digitalWrite(Boton_Array_4, HIGH);
lcd.setCursor (Num_Col_Pos, Num_Row_Pos);
}
void Numerico_Calc(byte value)
{
// escritura del numero desde el teclado numerico si value es 1 entra opcion de A 255 y B 0
byte Salida = 0;
int Num_Val_Temp_1 = 0;
int Num_Val_Temp_2 = 0;
int Num_Val_Temp_3 = 0;
lcd.setCursor (Num_Col_Pos, Num_Row_Pos);
lcd.print("___");
lcd.blink(); // mostrar cursor
//Num_Val = 0;
Num_Col_Pos = Num_Col_Pos + 2;
lcd.setCursor (Num_Col_Pos, Num_Row_Pos);
// primer numero
Numerico_Read(); // leer boton
if (Boton_Calc <= 9)
{
lcd.print (Boton_Calc); // escribir valor calculado
lcd.setCursor (Num_Col_Pos, Num_Row_Pos);
Num_Val = Boton_Calc; // valor calculado
Num_Val_Temp_1 = Boton_Calc; // valor temporal para el acarreo
}
if (Boton_Calc == 14) // enter
{
goto Salida; // num val = 0
}
if (value == 1) // si es un valor
{
if (Boton_Calc == 10) // 255
{
Num_Val = 255;
goto Salida;
}
if (Boton_Calc == 11) // 000
{
Num_Val = 0;
goto Salida;
}
if (Boton_Calc == 12) // ubicar
{
Num_Val = 612;
goto Salida_Option;
}
if (Boton_Calc == 13) // analogo
{
Num_Val = 712;
goto Salida_Option;
}
}
// segundo numero
Numerico_Read(); // leer boton
if (Boton_Calc == 14) // enter
{
Num_Val = Num_Val_Temp_1;
goto Salida; // num val = num val anterior
}
if (value == 1) // si es un valor
{
if (Boton_Calc == 10) // 255
{
Num_Val = 255;
goto Salida;
}
if (Boton_Calc == 11) // 000
{
Num_Val = 0;
goto Salida;
}
if (Boton_Calc == 12) // ubicar
{
Num_Val = 612;
goto Salida_Option;
}
if (Boton_Calc == 13) // analogo
{
Num_Val = 712;
goto Salida_Option;
}
}
if (Boton_Calc <= 9)
{
// recorrer numero ya impreso
Num_Col_Pos = Num_Col_Pos - 1;
lcd.setCursor (Num_Col_Pos, Num_Row_Pos);
lcd.print (Num_Val_Temp_1);
// dibujar numero nuevo
lcd.print (Boton_Calc);
Num_Val_Temp_2 = Boton_Calc;
Num_Col_Pos = Num_Col_Pos + 1;
lcd.setCursor (Num_Col_Pos, Num_Row_Pos);
}
// Tercer numero
Numerico_Read(); // leer boton
if (Boton_Calc == 14) // enter
{
Num_Val = (Num_Val_Temp_1 * 10) + Num_Val_Temp_2;
goto Salida;
}
if (value == 1) // si es un valor
{
if (Boton_Calc == 10) // 255
{
Num_Val = 255;
goto Salida;
}
if (Boton_Calc == 11) // 000
{
Num_Val = 0;
goto Salida;
}
if (Boton_Calc == 12) // ubicar
{
Num_Val = 612;
goto Salida_Option;
}
if (Boton_Calc == 13) // analogo
{
Num_Val = 712;
goto Salida_Option;
}
}
if (Boton_Calc <= 9)
{
// recorrer numero ya impreso
Num_Col_Pos = Num_Col_Pos - 2;
lcd.setCursor (Num_Col_Pos, Num_Row_Pos);
lcd.print (Num_Val_Temp_1);
lcd.print (Num_Val_Temp_2);
// dibujar numero nuevo
Num_Col_Pos = Num_Col_Pos + 2;
lcd.setCursor (Num_Col_Pos, Num_Row_Pos);
lcd.print (Boton_Calc);
Num_Val = Boton_Calc + (Num_Val_Temp_1 * 100) + (Num_Val_Temp_2 * 10);
}
Salida:
lcd.noBlink();
// pintar los ceros antes del numero
Numerico_Write (Num_Val, Num_Col_Pos - 2, Num_Row_Pos);
Num_Col_Pos = Num_Col_Pos - 4;
// regresar el cursor a su ligar
lcd.setCursor (Num_Col_Pos, Num_Row_Pos);
Salida_Option:
{
lcd.noBlink();
lcd.setCursor (Num_Col_Pos, Num_Row_Pos);
delay(300); // rebote de boton
}
}
null
void Numerico_Read()
{
long Num_Barrido_Time = 5; // tiempo entre barrido de keys
Boton_Calc = 17; // limpiar valor para lectura
while (Boton_Calc == 17) // valor calculado # E * F, 17 sin valor calculado
{
// Barrido
// Linea 1
digitalWrite(Boton_Array_1, LOW); // lectura linea 1
// Lectura 1A = 1
if (digitalRead(Boton_Array_A) == LOW)
{
Boton_Calc = 1;
delay(Boton_Delay_Teclado);
}
delay(Num_Barrido_Time);
// Lectura 1B = 6
if (digitalRead(Boton_Array_B) == LOW)
{
Boton_Calc = 4;
delay(Boton_Delay_Teclado);
}
delay(Num_Barrido_Time);
// Lectura 1C = 7
if (digitalRead(Boton_Array_C) == LOW)
{
Boton_Calc = 7;
delay(Boton_Delay_Teclado);
}
delay(Num_Barrido_Time);
// Lectura 1D = * = 15
if (digitalRead(Boton_Array_D) == LOW)
{
Boton_Calc = 15;
delay(Boton_Delay_Teclado);
}
delay(Num_Barrido_Time);
digitalWrite(Boton_Array_1, HIGH); // lectura linea 1
// Linea 2
digitalWrite(Boton_Array_2, LOW); // lectura linea 2
// Lectura 2A = 2
if (digitalRead(Boton_Array_A) == LOW)
{
Boton_Calc = 2;
delay(Boton_Delay_Teclado);
}
delay(Num_Barrido_Time);
// Lectura 2B = 5
if (digitalRead(Boton_Array_B) == LOW)
{
Boton_Calc = 5;
delay(Boton_Delay_Teclado);
}
delay(Num_Barrido_Time);
// Lectura 2C = 8
if (digitalRead(Boton_Array_C) == LOW)
{
Boton_Calc = 8;
delay(Boton_Delay_Teclado);
}
delay(Num_Barrido_Time);
// Lectura 2D = 0
if (digitalRead(Boton_Array_D) == LOW)
{
Boton_Calc = 0;
delay(Boton_Delay_Teclado);
}
delay(Num_Barrido_Time);
digitalWrite(Boton_Array_2, HIGH); // lectura linea 2
// Linea 3
digitalWrite(Boton_Array_3, LOW); // lectura linea 3
// Lectura 3A = 3
if (digitalRead(Boton_Array_A) == LOW)
{
Boton_Calc = 3;
delay(Boton_Delay_Teclado);
}
delay(Num_Barrido_Time);
// Lectura 3B = 4
if (digitalRead(Boton_Array_B) == LOW)
{
Boton_Calc = 6;
delay(Boton_Delay_Teclado);
}
delay(Num_Barrido_Time);
// Lectura 3C = 9
if (digitalRead(Boton_Array_C) == LOW)
{
Boton_Calc = 9;
delay(Boton_Delay_Teclado);
}
delay(Num_Barrido_Time);
// Lectura 3D = 14
if (digitalRead(Boton_Array_D) == LOW)
{
Boton_Calc = 14;
delay(Boton_Delay_Teclado);
}
delay(Num_Barrido_Time);
digitalWrite(Boton_Array_3, HIGH); // lectura linea 3
// Linea 4
digitalWrite(Boton_Array_4, LOW); // lectura linea 4
// Lectura 4A = 10
if (digitalRead(Boton_Array_A) == LOW)
{
Boton_Calc = 10;
delay(Boton_Delay_Teclado);
}
delay(Num_Barrido_Time);
// Lectura 4B = 11
if (digitalRead(Boton_Array_B) == LOW)
{
Boton_Calc = 11;
delay(Boton_Delay_Teclado);
}
delay(Num_Barrido_Time);
// Lectura 4C = 12
if (digitalRead(Boton_Array_C) == LOW)
{
Boton_Calc = 12;
delay(Boton_Delay_Teclado);
}
delay(Num_Barrido_Time);
// Lectura 4D = 13
if (digitalRead(Boton_Array_D) == LOW)
{
Boton_Calc = 13;
delay(Boton_Delay_Teclado);
}
delay(Num_Barrido_Time);
digitalWrite(Boton_Array_4, HIGH); // lectura linea 4
// Cursor center "enter"
if (digitalRead(Boton_Center) == LOW)
{
Boton_Calc = 14;
delay(Boton_Delay_Teclado);
}
}
}
void Analog_Read_DMX(byte col, byte row)
{
// escritura del numero desde el potenciometro aplica a dmx
int read;
lcd.setCursor (col - 1, row);
lcd.print("a"); // indicar que es analogo
digitalWrite(Boton_Array_3, LOW); // lectura linea 3
lcd.blink();
int valores = 0;
while (digitalRead(Boton_Array_D) == HIGH && digitalRead(Boton_Center) == HIGH) // enter y center para paro
{
read = analogRead(Pot); // lectura desde el potenciometro
read = read / 4; // / 4 porque es de 12 bits
delay(50);
if (valores != read)
{
Numerico_Write(read, col, row);
ArduinoDmx0.TxBuffer[Canal_Actual - 1] = read;
DMX_Values[Canal_Actual] = read;
valores = read;
}
}
lcd.noBlink();
digitalWrite(Boton_Array_3, HIGH); // lectura linea 3 // retraso para center
delay(300); // delay para salir de la lectura analoga
}
用戶輸入
在啟動時它會顯示選項“初始內存”,以設置 RAM 的初始值
">" 表示光標在菜單上的位置
“+”和閃爍的光標,數字符號表示需要用戶輸入
菜單之間的導航由光標向上、向下、向右、向左和居中進行,應用為“輸入”
當在需要用戶輸入的菜單中給出“Enter”時,出現“+ ___”并且指示用戶輸入的閃爍光標,在這種情況下,如果文檔編號小于 3 位,則使用小鍵盤按“#”,其功能為一個“輸入”在數字鍵盤上
如果是用戶輸入,其中顯示了 DMX 通道的值,您可以按(在“回車”后)直接鍵入“255”(通道的最大值)的鍵“A”或“B”鍵你直接輸入“000”(一個通道的最小值)
“C”鍵用作定位燈具或特定通道的方法,只需在值中選擇通道位置,“輸入”并按“C”,該值將在“000”和“255”之間排序通道", 停止再按一次返回"C"
“*”鍵開啟或關閉背光
“D”只對模擬電位器數值有效,按鍵可通過轉動輸入數值
“Ctrl”返回菜單選項“控制選項”
初始:
設置 RAM 的初始值,EEPROM 讀取自:
空(EEPROM保持原樣不變,所有通道都在“000”)
加載(加載存儲在 DMX Universe 的 EEPROM 中的值)
清除(擦除存儲在 EEPROM 中的值并保留通道“000”)

控制選項:
用戶選擇不同DMX通道的控制方式
“內存”訪問內存選項
"統一快速訪問特定頻道
“矩陣”顯示一個 3 x 5 的矩陣,其中包含不同通道的當前值
“追逐者”在頻道之間制作特定的序列
“乘”為特定數量的通道分配一個值,具有特定的數值跳轉
“配置”訪問系統設置
單一控制
它允許快速訪問特定頻道
“頻道”頻道訪問
“價值”獲取渠道價值
“Ctrl” 訪問菜單“控制選項”
“內存” 訪問“內存選項”菜單

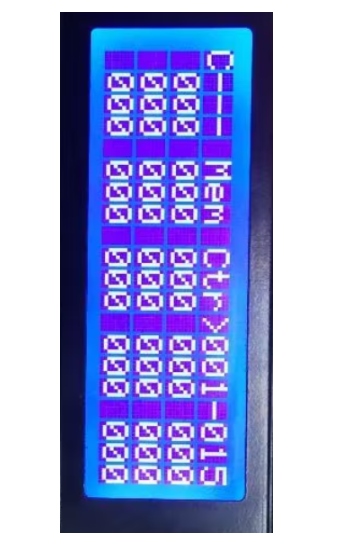
矩陣控制
顯示一個 3 x 5 的矩陣,其中包含不同 DMX 通道的當前值
“C ---”從光標處顯示所選通道的編號
“內存”訪問“內存選項”
“Ctrl”訪問“控制選項”
“001-015”獲取要顯示的通道數,以3×5的矩陣形式顯示,第一個數字代表第一個通道,第二個到最后一個通道
延遲控制
允許通道之間的特定序列
“ChaserCH”顯示排序的當前值(在序列開始之后)
“延遲”,選擇每一步之間的時間量,單位為 mS(毫秒),該值近似于數字 10 = mS 的數量
“First CH”,選擇序列的第一個通道
“最后的 CH”。選擇序列中的最后一個通道
“Ctrl”訪問“控制選項”,序列值不影響RAM out with old values
“開始”開始序列并切換到“停止”,您可以在此處停止序列
例子:
選擇“延遲”100 (100x10 = 1000 mS)、“第一通道”001 和“最后通道”512 結果是從通道 1 到 512 的序列,通道之間的步長每秒

乘法控制
為特定數量的通道分配一個值,并帶有特定的數字跳轉
“值”選擇要寫入的值(000-255)
“First CH”選擇第一個頻道
“乘”選擇要相乘的通道數
“數量”選擇要乘的次數
“Ctrl”訪問“控制選項”,RAM影響通道
“內存”訪問“內存選項”
“應用”評估請求是不可能的應用程序顯示消息“錯誤”,否則應用乘法通道并放置選定的值
例子:
選擇“值”= 255,“第一個通道”= 001,“乘”= 003“數量”= 170 和“應用”
結果:從通道 1 到 510 的 170 個通道,3 對 3,值為 255

內存選項
輕松訪問 EEPROM 選項
“保存”以當前值保存 DMX Universe
從先前保存的 DMX Universe 的 EEPROM 值中“加載”加載
"Empty" 使用當前 DMX 值刪除 RAM,而不影響 EEPROM
“清除”清除存儲在 EEPROM 中的 DMX 宇宙
“Black” 選項 “Black Out”,將DMX全域的所有通道置“000”,不影響內存,按“enter”或“central”退出,返回上述值
取消(返回上一級菜單,不做任何更改)

配置
整體系統配置
位于“控制選項”
“背光” 選擇 LCD 背光的 000-255 之間的調光值
“對比度”選擇調光值在150-255 LCD對比度之間(降低150,防止LCD看不到)
“退出”返回上一級菜單
修改后的值自動保存在 EEPROM 存儲器中
-
測試儀
+關注
關注
6文章
3753瀏覽量
54910 -
控制器
+關注
關注
112文章
16385瀏覽量
178379 -
DMX512協議
+關注
關注
1文章
6瀏覽量
11451
發布評論請先 登錄
相關推薦
【Aworks申請】樓宇智能WiFi LED調光(DMX512協議)控制器
了解一下DMX512的基本協議
DMX512的基本協議相關資料分享
DMX512數據協議標準
DMX512協議是什么 DMX512數字燈光控制系統介紹

DMX512燈光控制協議及LED控制系統的設計
dmx512是什么_dmx512端口定義
DMX512控制器說明及介紹,DMX512控制器使用說明
dmx512控制器作用和特點是什么(工作原理及接線圖)
基于STM32的DMX512開發筆記







 工商網監
工商網監
評論