


01.
硬件測試
1.1 硬件模塊化測試
硬件模塊化測試一般包含以下三個部分
1)硬件模塊通道級測試(HW Bring-up測試):一般是在硬件第一次生產(chǎn)出來,主要做各硬件模塊的通道級測試,譬如,MCU/SoC的最小系統(tǒng)運(yùn)行是否正常;CAN/以太網(wǎng)通訊的基本功能是否正常;數(shù)字開關(guān)輸入/模擬信號輸入是否正常;負(fù)載驅(qū)動輸出是否正常;Camera數(shù)據(jù)流輸入/Display顯示功能是否正常等等。
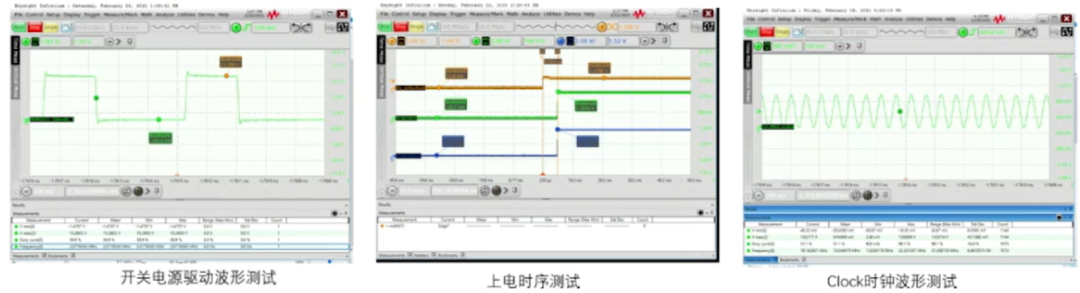
2)硬件模塊信號級測試(設(shè)計(jì)驗(yàn)證):在各硬件模塊滿足通道測試的前提下,利用示波器等測試工具,對硬件模塊內(nèi)部的關(guān)鍵信號進(jìn)行測量,以確認(rèn)驅(qū)動信號是否有振鈴產(chǎn)生;SoC電源的上下電時序是否滿足需求;Clock時鐘波形是否滿足spec需求等等。
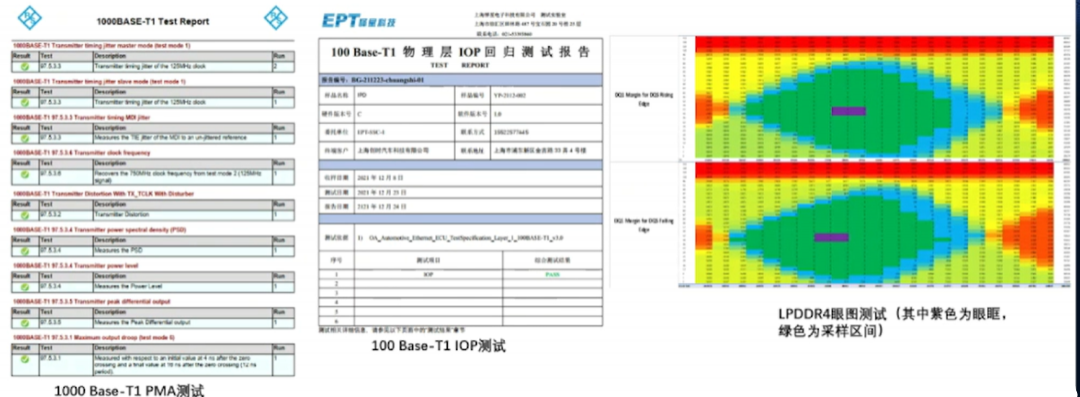
3)硬件高速信號測試:在智駕域控制器中,部分告訴信號的測試已無法通過示波器的測量波形來評價信號質(zhì)量的優(yōu)劣,必須通過相應(yīng)的一致性(Compliance Test)或者眼圖來評價告訴信號質(zhì)量,例如以太網(wǎng)一致性測試(包括PMA測試,IOP測試),GMSL的一致性測試,LPDDR4/5的眼圖測試等等。
1.2 DV/PV測試
在上汽內(nèi)部,主要參照上汽的SMTC38000001和SMTC38000006,制定產(chǎn)品的DV/PV測試計(jì)劃,并在OEM認(rèn)可的的第三方實(shí)驗(yàn)室進(jìn)行相應(yīng)的DV/PV測試。
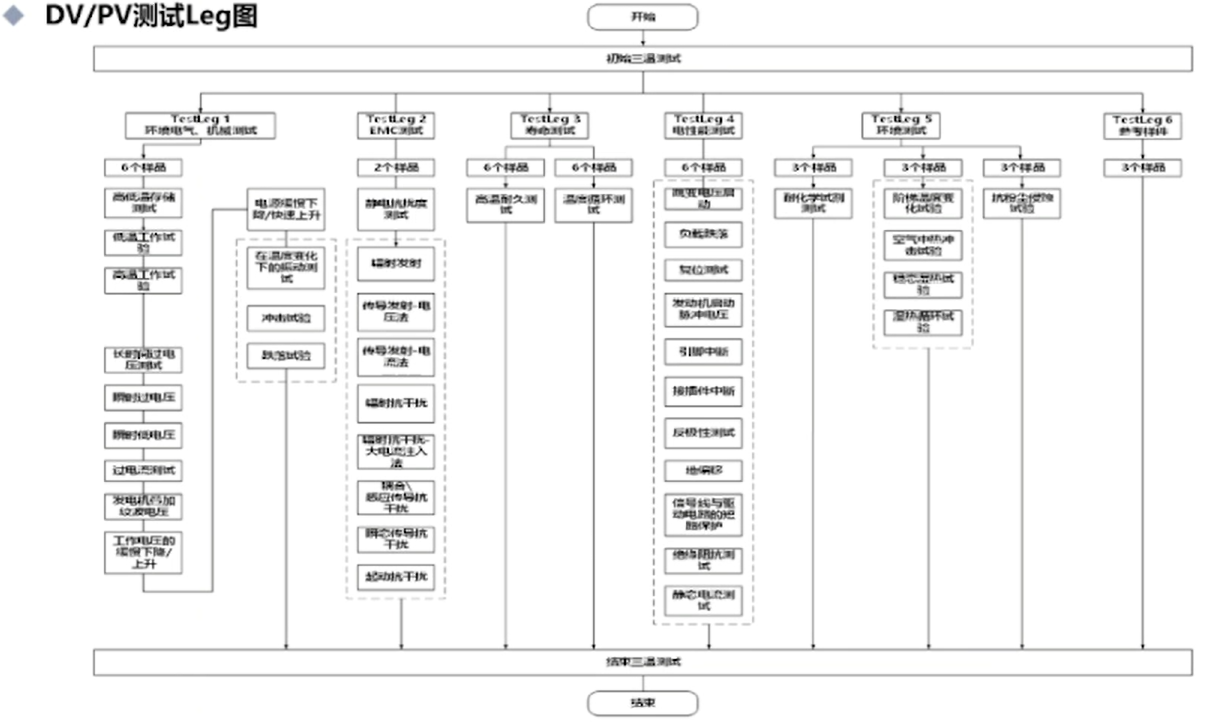
根據(jù)實(shí)際項(xiàng)目的不同DV/PV測試會有不同的Leg圖,以上圖為列,分6個Leg測試,第一步是環(huán)境電氣,機(jī)械試驗(yàn),第二步是EMC測試,第三步是壽命測試,第四步是電性能測試,第五步是環(huán)境測試,第六個是參考樣件,根據(jù)不同的項(xiàng)目留不同的good sample。
02.
軟件接口測試
2.1 測試方案
創(chuàng)時主要提供的一個基于SOA架構(gòu)的軟件,在上層應(yīng)用上會提供大量的軟件接口。在測試過程中,大量的軟件接口就成為測試的一個難點(diǎn),也是一個重點(diǎn),如何保證測試的完整性和可靠性,目前采用的方案如下:
第一步:輸入
System model(系統(tǒng)模型):通過客戶提供的系統(tǒng)模型(.arxml)知道整個系統(tǒng)在不同的host之間有多少上層RTE接口的Provider和Consumer
Communication description(通訊矩陣描述):包括比較傳統(tǒng)的.dbc, 以太網(wǎng)、SOMEIP、CANFD用.arxml作為通訊矩陣的輸入:
Source code:通過Davinci自動生成
第二步:執(zhí)行
將這些輸入全部導(dǎo)入到MotionWise Creator中并執(zhí)行
第三步:輸出
在第三步中會生成一些.c跟.h的文件,這些test code主要用于把這些測試代碼集成到上層RTE接口,另外它會生成一些CANOE的.can文件CAPL文件跟xml文件,這樣測試的上位機(jī)和待測軟件的測試代碼就已經(jīng)生成好了。
2.2 測試workflow
接口測試的主要分為兩個部分,第一個是輸入中模型輸入,模型輸入主要包含上層SWC之間的通信接口,第二個是通訊矩陣的描述,通訊矩陣描述包含外圍的CAN總線跟以太網(wǎng)信號傳輸?shù)綐蛹校虼讼鄳?yīng)會做一個RTE READ測試。
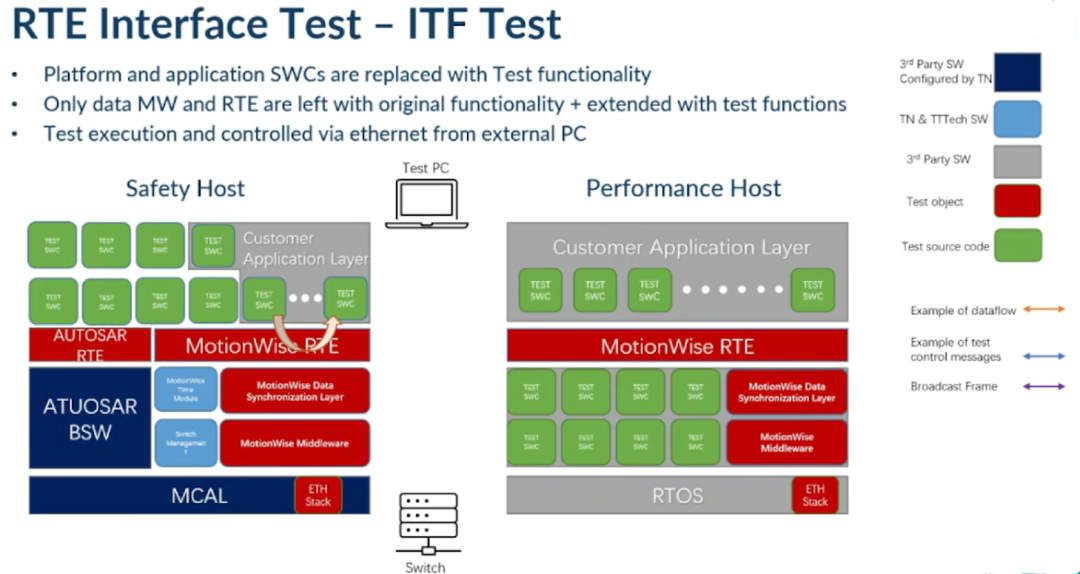
以系統(tǒng)模型輸入為例,比如兩個SWC之間的測試驗(yàn)證。假設(shè)在客戶端的兩個SWC之間,通過模型識別到左側(cè)的test SWC作為一個provider,右側(cè)的SWC作為consumer,上一步已經(jīng)生成了一些.C文件跟一些CAPL的或者是.can的一些測試腳本,那么當(dāng)集成完整個測試鏈路之后,首先,外部會有Test PC, Test PC現(xiàn)在主要是基于CANoe的以太網(wǎng)的一個UDP的報文進(jìn)行控制,Test PC會發(fā)一些UDP報文,然后通過ETH Stack發(fā)送給待測host,待測host通過IP地址跟UDP的port口直接將這條控制報文發(fā)送給上層待測的SWC, SWC通過報文內(nèi)容的PayLoad,會知道現(xiàn)在是想要測試的哪一個接口、想用的測試方法是最大還是最小還是一個典型值,然后待測SWC會將這個數(shù)據(jù)通過RTE write的方式寫入這個接口。寫入完成之后,待測SWC會把寫入成功的返回值又通過以太網(wǎng)的報文發(fā)送,那么我們知道我們其實(shí)成功觸發(fā)的這條測試案例,下一步右側(cè)待測的SWC,會通過主播報文,把它所收到的值通過UDP的主播報文發(fā)送到以太網(wǎng)上面,然后通過一個反序列化的操作,去解析是否它跟這個測試觸發(fā)想要設(shè)置的命令跟拿到的命令對比,如果是一致的,那就認(rèn)為這條測試案例,這個接口在provider端跟consumer端都是測試通過的。
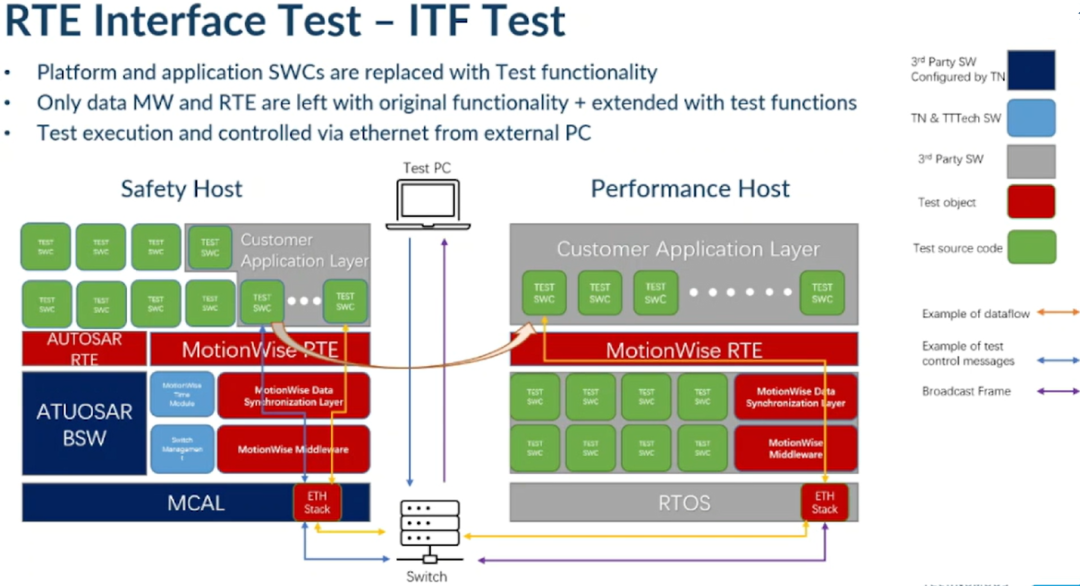
跨HOST的測試也是用同樣的方式。比如現(xiàn)在左側(cè)test SWC是一個待測的話,它只是相當(dāng)于把自己接收到的數(shù)據(jù),通過RTE接口,再通過Switch發(fā)送到了右端另外一個host上一個待測的SWC,右側(cè)SWC也是會通過UDP的主播報文,把它接收到的數(shù)據(jù)返回到總線然后回傳給test PC,依然是利用一個反序列化的一個動作去解析到底設(shè)置的值跟得到的值是否是一致。
如果是對外總線的驗(yàn)證測試,整體的思路是一樣的,只是走的鏈路可能不一樣。在測CAN或者是測包括以太網(wǎng)的時候,主要會把外圍的真實(shí)的CAN的環(huán)境接進(jìn)去,上層待測SWC數(shù)據(jù)接收方式走真實(shí)CAN drv的方式往上層傳輸,傳輸?shù)阶钌蠈咏邮斩薃pCom,然后ApCom會再把這些數(shù)據(jù),根據(jù)模型把它RTE write到不同的待測SWC中,那么待測SWC也依然會往外發(fā)它所接收到值的組播報文,然后test PC通過這些定義好的組播報文的地址跟PayLoad的做一個反序列化,然后把數(shù)據(jù)進(jìn)行對比。
03.
系統(tǒng)測試
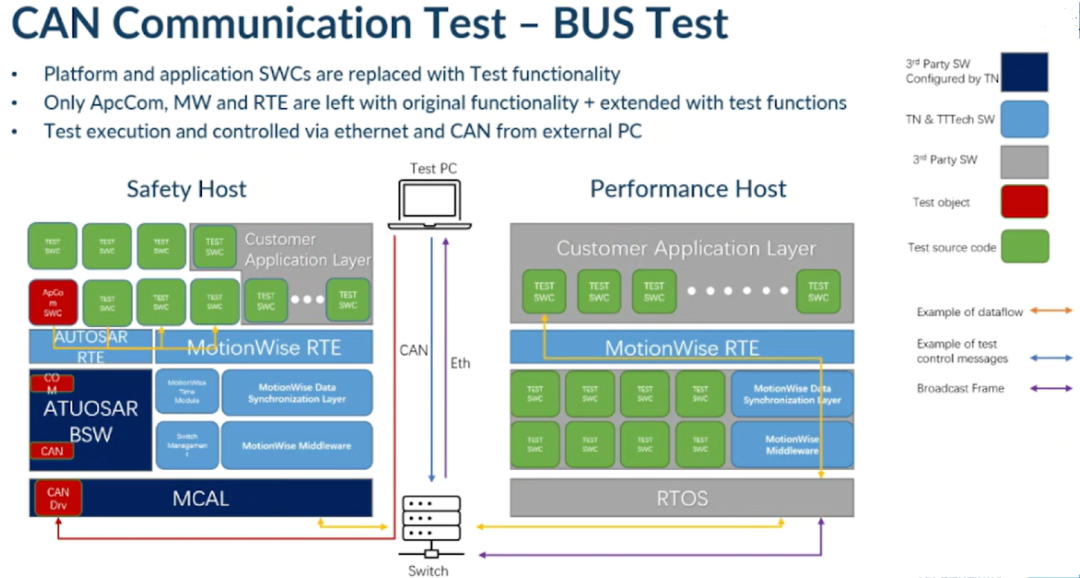
3.1 CAN通訊測試
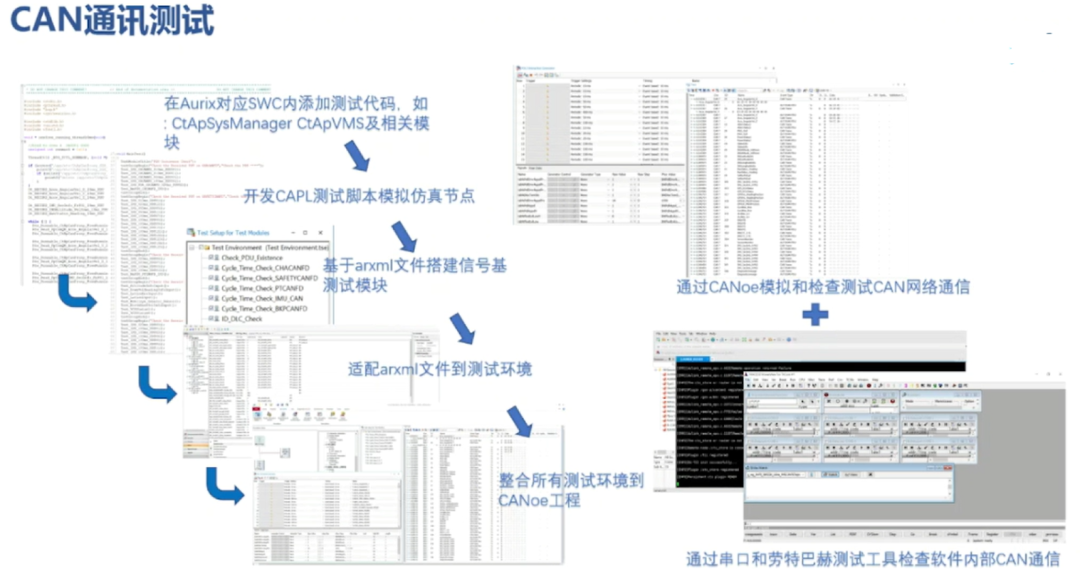
CAN通訊測試跟前面類似,根據(jù)客戶的arxml輸入,包括模型跟dbc的輸入去識別到它到底有哪些接口,開發(fā)相應(yīng)的CAPL測試腳本,來觸發(fā)dot所需要接收到的值,發(fā)送它的最大最小,然后還會額外關(guān)心通訊的報文周期、DLC的長度、不同signal的PayLoad排布方式、mapping的方式。然后把它再整合到整個CANoe工程中,最后通過test module方式,將整個CAN總線的測試結(jié)果反饋出來。
有時候會通過串口或者勞特巴赫去檢測CAN內(nèi)部通信,比如說測試過程中對內(nèi)有需求,如當(dāng)DLC長度小于定義的時候,它不應(yīng)該往上傳輸,這樣就要配合勞特巴赫去ApCom,或者CAN Stack里面去看一下這一幀的數(shù)據(jù),在這個故障注入的時候,到底有沒有往RTE接口上去傳。
3.2 FOTA測試
FOTA測試主要分為正向測試和故障注入測試:
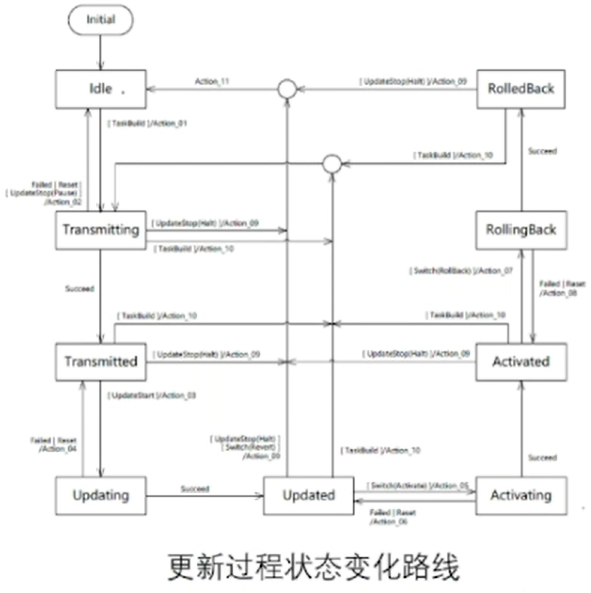
正向測試:
1.制作更新包
2.用ICC simulator觸發(fā)更新
3.用Tcpdump記錄板子和外部的通信
4.在串口顯示更新成功后,上載板子里的更新軟件與所做的更新包進(jìn)行對比
故障注入測試:
1.制作更新包
2.更改ICC Simulator代碼進(jìn)行故障注入
3.用TCPdump記錄板子和外部的通信
4.分析板子是否報告需求描述的錯誤
3.3 診斷測試
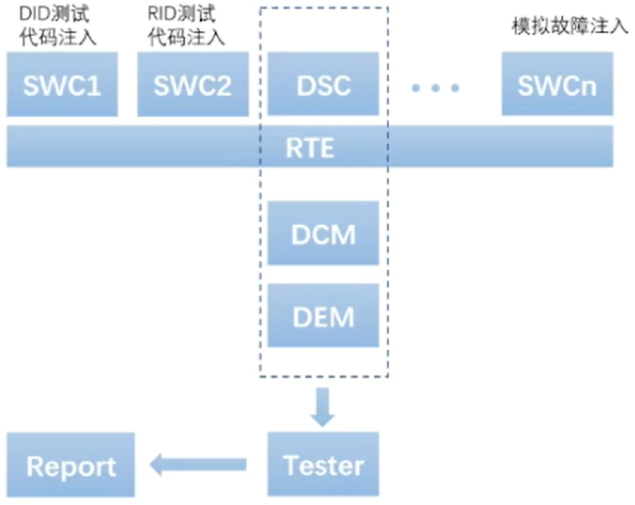
測試方法
1.將用于模擬DID(Data ID),RID(Routine ID)的測試代碼以及用來模擬DTC觸發(fā)的錯誤注入代碼插入到對應(yīng)的SWC中。DSC作為其中的一個SWC通過RTE接口來收集其他SWC發(fā)送過來的診斷相關(guān)模擬信號
2.基于ISO-14229的基本診斷服務(wù)主要放置DCM(Diagnostic Communication Manager)和DEM(Diagnostic Event Manager)中。這塊可以通過DiVa插件在CANoe中進(jìn)行測試。
3.4 以太網(wǎng)通訊測試
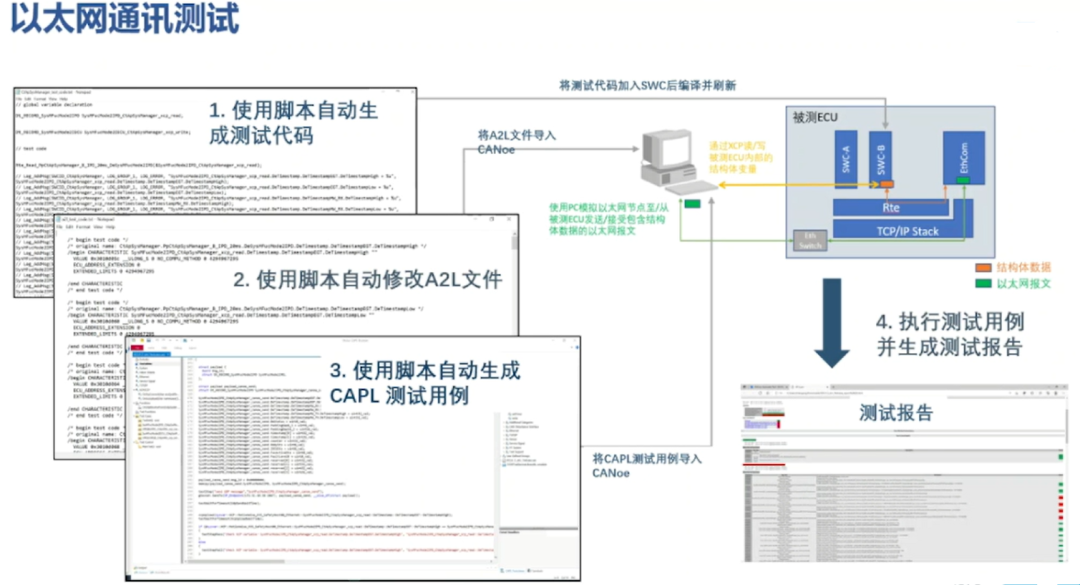
在一些需求里面,有些報文是不走SOMIP服務(wù),可能只是走單純的UDP或者TCP的一個鏈路,那么在這個過程中,一樣是通過客戶的arxml的輸入,通過腳本自動生成測試代碼;然后使用腳本,注入通過XCP需要觀測的一些變量,添加到A2L文件中;第三步通過CAPL觸發(fā)Eth的package發(fā)送去板端,發(fā)送的過程中,數(shù)據(jù)從電腦或CANoe,通過Eth的Switch傳送到上層的EthCom,然后再傳遞SWC接口,SWC接口所收到的數(shù)據(jù)可以通過XCP的方式觀測到,然后在一個測試周期里面把所有的上層RTE接口跟發(fā)送UDP報文里面的這些關(guān)鍵的signal進(jìn)行對比。
3.5 iECU3.1時間同步測試
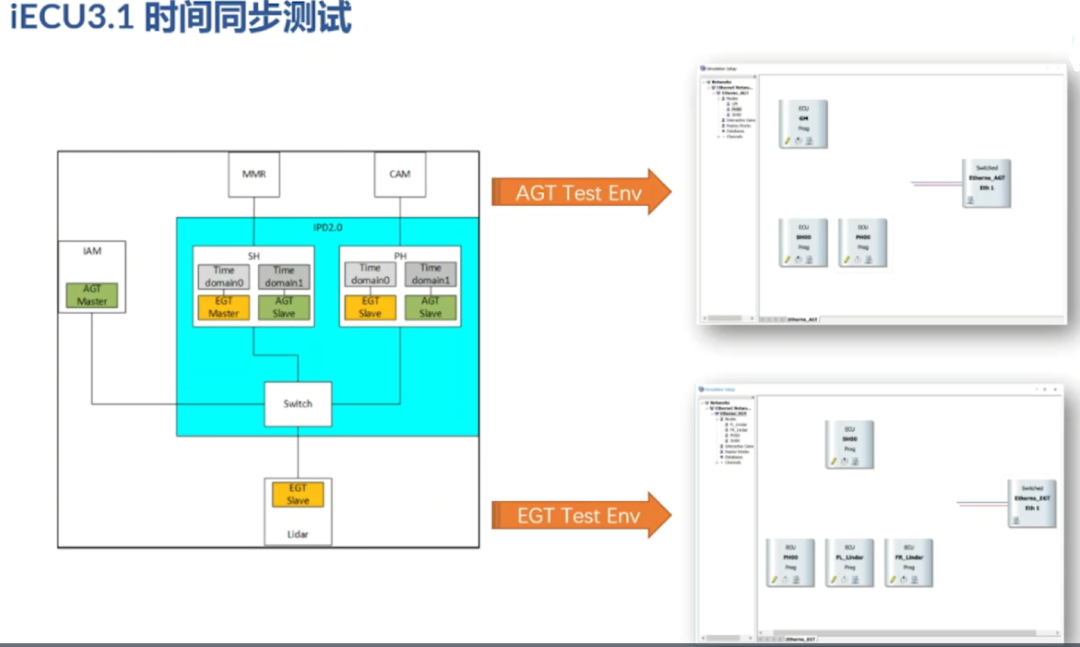
時間同步主要分為兩個域——AGT和EGT, EGT可以認(rèn)為是板子內(nèi)部Domain0的一個域, AGT是對外部有GrandMaster的一個域。
EGT域通過TCPdump的方式去抓取域內(nèi)通訊的PTP報文,然后觀察它:比如syn跟follow_up是否是正常成對出現(xiàn),時間同步報文里面SequenceCounter或者ClockIdetify是否都是滿足于預(yù)期; 其次會觀察Pdelay request跟Response 和Response ACK是否能被正確的交互出來。
AGT測試目前是通過CANoe或者樹莓派模擬發(fā)送AGT的報文,AGT的報文通過串口或UDP報文把它的時間打印出來,然后將內(nèi)部的AGT時間域通過串口的信息打印出來,或者通過其他的UDP報文也發(fā)送出來,這樣可以通過UDP報文之間一個時間的對比的差值,來反映同步上的這個狀態(tài)誤差到底在多少。目前,AGT是可以做到在十毫秒左右,基本上都是可以滿足客戶的要求。
04.
壓力與性能測試
大部分的feature在簡單工況下面可以滿足測試或者滿足需求的,但是如果真的是在一個壓力測試環(huán)境中,它或多或少會出現(xiàn)一些異常項(xiàng)。因此會做大量的壓力跟性能測試快速的檢測出軟件里面的薄弱環(huán)節(jié)。
4.1 CAN通訊測試(丟幀)-臺架測試方案
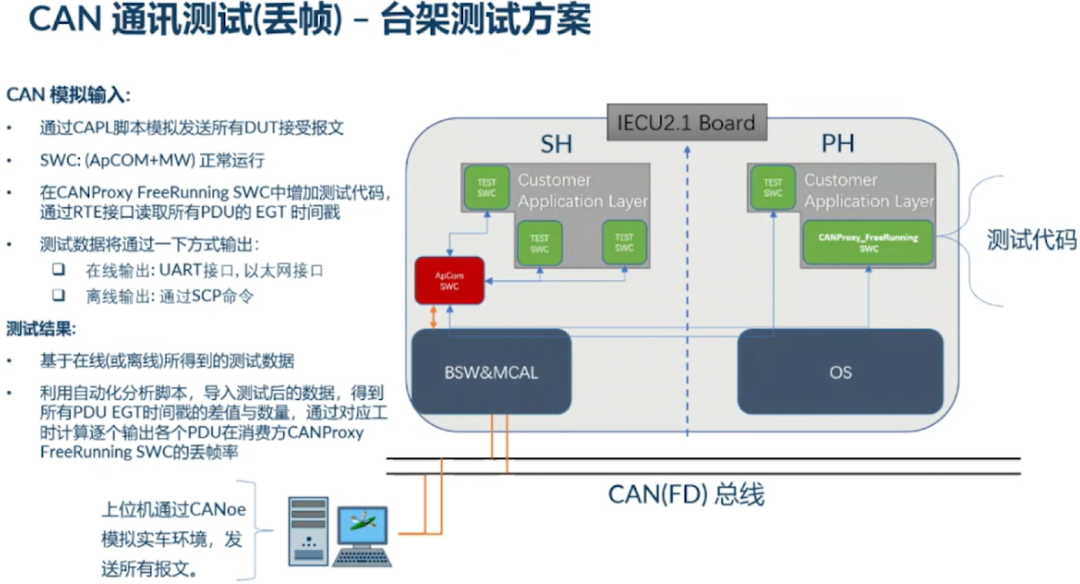
CAN 模擬輸入:
通過CAPL 腳本模擬發(fā)送所有DUT接受報文
SWC:(ApCOM+MW)正常運(yùn)行
在CANProxy FreeRunning SWC中增加測試代碼,通過RTE接口讀取所有PDU的EGT時間戳
測試數(shù)據(jù)將通過以下方式輸出:
在線輸出:UART接口,以太網(wǎng)接口
離線輸出:通過SCP命令
測試結(jié)果
基于在線(或者離線所得到的測試數(shù)據(jù))
利用自動化分析腳本,導(dǎo)入測試后的數(shù)據(jù),得到所有PDU EGT時間戳的差值與數(shù)量,通過對應(yīng)工時計(jì)算諸葛輸出各個PDU在消費(fèi)方CANProxy FreeRunning SWC的丟幀率
4.2 CAN通訊丟幀測試 - 測試代碼自動生成器
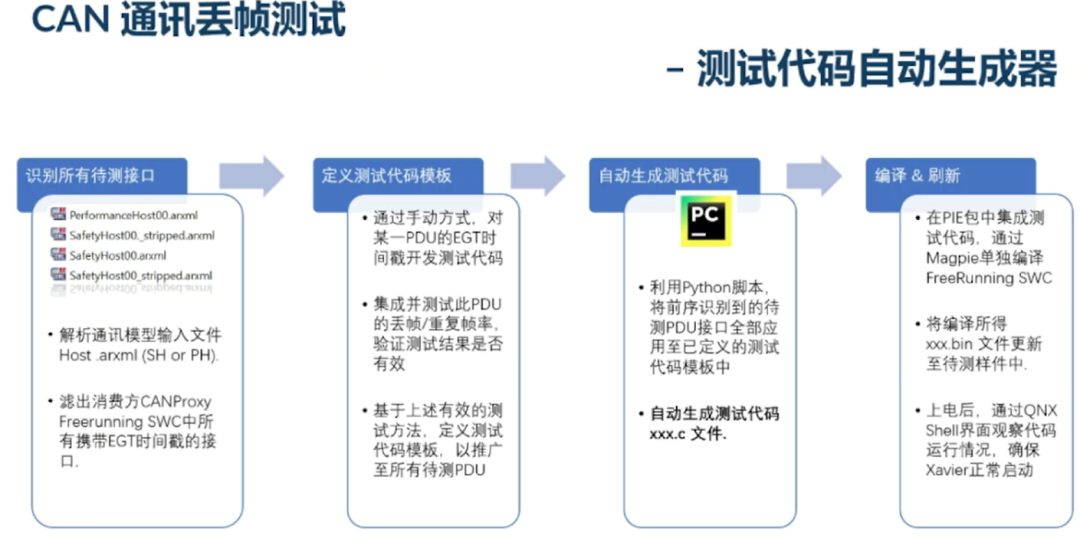
1.識別所有待測接口
解析通訊模型輸入文件 Host .arxml(SH or PH)
濾出消費(fèi)方CANProxy FreeRunning SWC中所有攜帶EGT時間戳的接口
2.定義測試代碼模板
通過手動方式,對某一PDU的EGT時間戳開發(fā)測試代碼
集成并測試此PDU的丟幀率,驗(yàn)證測試結(jié)果是否有效
基于上述有效的測試方法,定義測試代碼模板,以推廣至所有待測PDU
3.自動生成測試代碼
利用Python腳本,將前序識別到的待測PDU接口全部應(yīng)用至已定義的測試代碼模板中
自動生成代碼xxx.c文件
4.編譯&刷新
在PIE包中集成測試代碼,通過Magpie單獨(dú)編譯FreeRunning SWC
將編譯所得xxx.bin文件更新至待測樣件中
上電后,通過QNX Shell界面觀察代碼運(yùn)行情況,確保Xavior正常啟動
4.3 CAN通訊丟幀測試 - 測試數(shù)據(jù)自動解析器
1.獲取測試數(shù)據(jù)
CAN數(shù)據(jù)
xxx.blf(CANoe)
Etheret數(shù)據(jù)
xxx.pcap(Wireshark)
xxx.pcap(Tcpdump)
RTE_Read數(shù)據(jù)
xxx.text
2.自動分析
通過EGT時間戳,對其所有測試數(shù)據(jù)
使用Python腳本,分別計(jì)xxx.pcap and xxx.txt file的實(shí)際丟幀率
1.計(jì)算得到測試時間長度(End.Time – Start. Time)
2.計(jì)算得到該測試時長的理論有效EGT采樣點(diǎn)個數(shù)
3.計(jì)算得到該測試時長的實(shí)際有效EGT采樣點(diǎn)個數(shù)
4.將計(jì)算輸出帶入公式=(1-實(shí)際采樣點(diǎn)個數(shù)/理論采樣點(diǎn)個數(shù))%,得到實(shí)際丟幀率
3.輸出最終測試結(jié)果
以太網(wǎng)Tcpdump丟幀率
消費(fèi)方CANProxy RTE_Read接口丟幀率
通過丟幀率數(shù)據(jù),識別丟幀現(xiàn)象出現(xiàn)在鏈路
Aruix側(cè)?
MW of Aruix側(cè)?
MW of Xavior側(cè)?
重復(fù)測10次,保證測試樣本足夠,統(tǒng)計(jì)后得到最終測試結(jié)果
4.4 性能測試
實(shí)際測試過程是在一個上層沒有布真實(shí)客戶算法的空RTE環(huán)境中,那么怎么保證在空的環(huán)境里面跟集成客戶算法的環(huán)境里SOA的穩(wěn)定性呢?這需要做一個性能測試,主要分為task跟core兩個層面。
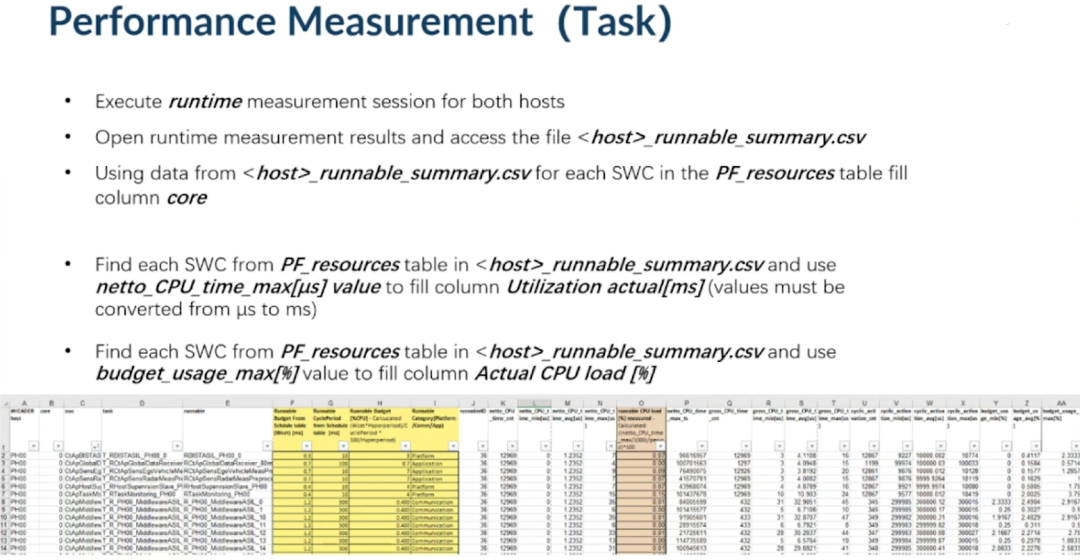
目前用到了一個內(nèi)部叫做Perf的測試工具,它也是通過以太網(wǎng)的方式,支持python2或者3。敲一段命令之后,它可以觸發(fā)到軟件內(nèi)部的Check point進(jìn)行一個計(jì)算,最后計(jì)算的Summary以CSV格式保存下來。
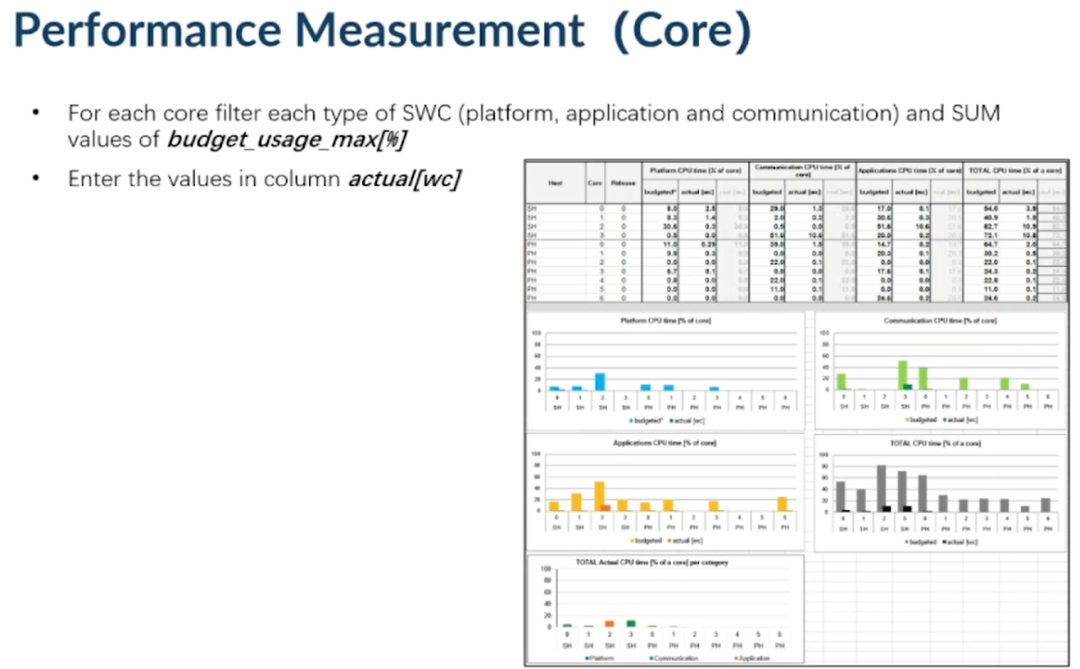
最終perf會把這些數(shù)據(jù)全部匯總到Core上面,這樣就可以看到在未集成算法的時候整個SOA它的負(fù)載率是多少。這個工具不僅可以用到未集成上層算法的環(huán)境中,如果客戶集成了他自己的應(yīng)用算法,他想看一下在集成應(yīng)用算法的時候,到底自己的WCET負(fù)載率到底有沒有超出預(yù)期,也是可以通過這個工具非常直觀的看出,或者可以做一個標(biāo)定的用途,來滿足整體的系統(tǒng)設(shè)計(jì)需求。
審核編輯 :李倩
-
控制器
+關(guān)注
關(guān)注
114文章
17136瀏覽量
184555 -
示波器
+關(guān)注
關(guān)注
113文章
6718瀏覽量
189502 -
模塊化
+關(guān)注
關(guān)注
0文章
341瀏覽量
22029
原文標(biāo)題:關(guān)于區(qū)域控制器底層測試的介紹
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
市場份額國產(chǎn)第一!經(jīng)緯恒潤開啟物理區(qū)域控制器新紀(jì)元

恩智浦FS24功能安全SBC芯片詳解 為區(qū)域控制器節(jié)點(diǎn)設(shè)計(jì)提供便利
汽車區(qū)域控制器方案指南

均普智能贏得區(qū)域控制器產(chǎn)線訂單
英飛凌與Flex聯(lián)合展示軟件定義汽車區(qū)域控制器平臺
英飛凌攜手Flex展示用于軟件定義汽車的區(qū)域控制器設(shè)計(jì)平臺
納芯微參與車身域控制器測試方法團(tuán)體標(biāo)準(zhǔn)審定,助力汽車電子行業(yè)技術(shù)創(chuàng)新

納芯微參與車身域控制器測試方法團(tuán)體標(biāo)準(zhǔn)審定
數(shù)明半導(dǎo)體參與起草車身域控制器測試方法團(tuán)體標(biāo)準(zhǔn)
區(qū)域控制器電源負(fù)載的智能調(diào)度

經(jīng)緯恒潤全棧底盤域控制器成功量產(chǎn),開啟智能出行新篇章
面向汽車T-BOX與域控制器的HIL測試新方案
通過電壓轉(zhuǎn)換啟用下一代ADAS域控制器應(yīng)用說明

使用邏輯和轉(zhuǎn)換優(yōu)化ADAS域控制器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論