 無人機傾斜攝影測量技術標準
無人機傾斜攝影測量技術標準
摘要: 無人機傾斜攝影測量技術在應用過程中,存在模型分辨率不一致、精度不可靠、格式不匹配的問題,但沒有現行的標準對任務質量進行評價,這在一定程度上限制了無人機傾斜攝影測量技術進一步發展。
本文針對無人機傾斜攝影測量技術的現狀,對從航攝準備( 硬件) 到數據處理應用( 軟件) 整個作業流程的技術標準進行了論述,為無人機傾斜攝影測量技術的從業人員提供一些參考。
無人機傾斜攝影測量技術是近年來發展起來的一項高新技術,傾斜攝影技術三維數據可真實反映地物的外觀、位置、高度等屬性; 借助無人機,可快速采集影像數據,實現全自動化三維建模; 傾斜攝影數據是帶有空間位置信息的可量測影像數據,能同時輸出 DSM、DOM、TDOM、DLG 等多種成果。目前,無人傾斜攝影測量技術已被越來越多的行業認可和應用,但針對無人機傾斜攝影的國家技術標準一直沒有明確,這就給無人機傾斜攝影工作帶來一定困擾。
本文結合實際工作和學習經驗,對無人機傾斜攝影測量技術標準進行初步的探討。
1.無人機傾斜攝影系統介紹
傳統航空攝影只能從垂直角度拍攝地物,傾斜攝影則通過在同一平臺搭載多臺傳感器,同時從垂直、側視等不同的角度采集影像,有效彌補了傳統航空攝影的局限。那么,無人機傾斜攝影系統可以定義為: 以無人機為飛行平臺,以傾斜攝影相機為任務設備的航空影像獲取系統。
1.1 飛行平臺的性能要求
目前,市場上無人機的種類繁多,按照動力系統可以區分為內燃機動力和電池動力; 從飛行實現方式上可以區分為固定翼和旋翼( 單旋翼、多旋翼) 。由于飛行平臺自身的振動問題,在成像質量上電池動力優于內燃機動力; 在作業效率和續航時間上,固定翼優于旋翼; 在飛行穩定性上,旋翼優于固定翼。由于無人機用途不同,其性能標準也不一樣。測繪型無人機對飛行標準要求更高,可以在載重、巡航速度、實用升限、續航時間、安全性和抗風等級等方面做出限定。
例如:
①無人機最低載重 2 kg;
②多旋翼巡航速度大于 6 m / s,固定翼無人機巡航速度大于10 m / s;
③電池動力續航時間大于 25 min,內燃機動力續航時間大于 1 h;
④抗風性要求不低于 4 級風速;
⑤無人機實用升限能達到 1000 m 以上,海拔高度不低于 3000 m。
1.2 傾斜相機的性能要求
在《低空數字航空攝影規范》( CH /Z 3005—2010) 中,對測繪航空攝影也就是垂直攝影的相片傾角有著 如 下 規 定: 傾 角 不 大 于 5°,最大不超過12°。現有的航測軟件處理能力已經有了很大提升,可以在這個標準的基礎上,把傾角 15°以上的都劃歸到傾斜攝影的范疇。傾斜攝影發展到今天,傾斜相機不再限定相機鏡頭的數量。傾斜相機的關鍵技術指標是獲取不同角度影像的能力和單架次作業的廣度和深度。這包括五鏡頭、三鏡頭、雙鏡頭等多鏡頭相機及可以調整相機拍攝角度的單相機系統。在無人機航測標準中,要求航測相機像素不低于 3500萬,在傾斜攝影中可以不對單一相機的像素進行限定,而對一次曝光獲取的影像像素進行控制。傾斜相機的性能要求可以從獲取影像能力、作業時間、曝光功能、續航時間、POS 記錄功能等方面做出限定。
例如:
①傾斜攝影一次曝光采集的像素越高越好,但要根據設備成本考量,單個鏡頭不低于2000 萬像素,一次曝光不低于 1 億像素;
②作業時間至少能滿足 90 min,最好具備全天候的作業能力;
③有定點曝光功能,確保影像重疊度滿足要求。
2.飛行航線的設計
2.1 航攝高度的確定
無人機傾斜攝影的飛行高度是航線設計的基礎。航攝高度需要根據任務要求選擇合適的地面分辨率,然后結合傾斜相機的性能,按照式( 1) 計算H= f×GSD/α ( 1)式中,H 為航攝高度,單位為 m; f 為鏡頭焦距,單位為 mm; α 為像元尺寸,單位為 mm; GSD 為地面分辨率,單位為 m。
2.2 航攝重疊度的設置
低空數字航空攝影規范規定“航向重疊度一般應為 60% ~ 80%,最小不小于 53%; 旁向重疊度一般應為 15% ~ 60%,最小不小于 8%”。在無人機傾斜攝影時,旁向重疊度是明顯不夠的。不論航向重疊度還是旁向重疊度,按照算法理論建議值是 66.7%。可以區分為建筑稀少區域和建筑密集區域兩種情況來進行介紹。
2.2.1 建筑稀少區域
考慮到無人機航攝時的俯仰、側傾影響,無人機傾斜攝影測量作業時在無高層建筑、地形地物高差比較小的測區,航向、旁向重疊度建議最低不小于70%。要獲得某區域完整的影像信息,無人機必須從該區域上空飛過。以兩棟建筑之間的區域為例,如果這兩棟建筑由于高度對這個區域能形成完全遮擋,而飛機沒有飛到該區域上空,那么無論增加多少相機都不可能拍到被遮區域,從而造成建筑模型幾何結構的粘連。
2.2.2 建筑密集區域
建筑密集區域的建筑遮擋問題非常嚴重。航線重疊度設計不足、航攝時沒有從相關建筑上空飛過,都會造成建筑模型幾何結構的粘連。為提高建筑密集區域影像采集質量,影像重疊度最多可設計為80% ~ 90%。當高層建筑的高度大于航攝高度的1 /4 時,可以采取增加影像重疊度和交叉飛行增加冗余觀測的方法進行解決。如著名的上海陸家嘴區域傾斜攝影,就是采用了超過 90%的重疊度進行影像采集以杜絕建筑物互相遮擋的問題。影像重疊度與影像數據量密切相關。影像重疊度越高,相同區域數據量就越大,數據處理的效率就越低。所以在進行航線設計時還要兼顧二者之間的平衡。
2.3 區域覆蓋設計
“航向覆蓋超出攝區邊界線應不少于兩條基線。旁向覆蓋超出攝區邊界線一般不少于像幅的50%”,這是原規范在航攝區域邊界覆蓋上的保證,但在無人機傾斜攝影時是明顯不夠的。理論上,需要目標區域邊緣地物能出現在像片的任何位置,與測區中心地區的特征點觀測量一樣。考慮到測區的高差等情況,可以按照式( 2) 來計算航線外擴的寬度L =H1×tan θ+ H2-H3 ( ) +L1 ( 2)式中,L 為外擴距離; H1 為相對航高; θ 為相機傾斜角; H2 為攝影基準面高度; H3 為測區邊緣最低點高度; L1 為半個像幅對應的水平距離。
3.控制測量
控制測量是為了保證空三的精度、確定地物目標在空間中的絕對位置。在常規的低空數字航空攝影測量外業規范中,對控制點的布設方法有詳細的規定,是確保大比例尺成圖精度的基礎。傾斜攝影技術相對于傳統攝影技術在影像重疊度上要求更高,現在的規范關于像控點布設要求不適合應用于高分辨率無人機傾斜攝影測量技術。無人機通常采用 GPS 定位模式,自身帶有 POS 數據,對確定影像間的相對位置作用明顯,可以提高空三計算的準確度。
3.1 常規三維建模
基于ContextCapture (Smart3D)算法,從最終空三特征點點云的角度可 以 提 供 一 個 控 制 間 隔,建議值是按每隔20000 ~ 40000 個像素布設一個控制點,其中有差分POS 數據( 相對較精確的初始值) 的可 以 放 寬 到40000個像素,沒有差分 POS 數據的至少 20 000 個像素布設一個控制點。同時也要根據每個任務的實際地形地物條件靈活應用,如地形起伏異常較大的、大面積植被及面狀水域特征點非常少的,需要酌情增加控制點。控制點測量采取附合導線測量方式,獲取高精度位置信息。
3.2 應急測繪保障
發生地震、山體滑坡、泥石流等自然災害后,為及時獲取災區可量測三維數據,不能按照傳統的作業方式進行控制測量,可通過在 Google 地圖讀取坐標、手持 GPS 測量、RTK 測量等方式快速獲取災區少量控制點,生成災區真三維模型,為災后救援提供幫助。
3.3 點位選擇要求
影像控制點的目標影像應清晰,選擇在易于識別的細小現狀地物交點、明顯地物拐角點等位置固定且便于量測的地方。條件具備時,可以先制作外業控制點的標志點,一般選擇白色( 或者紅色) 油漆畫十字形標志,并在航攝飛行之前試飛幾張影像,確保十字標志能在傾斜影像上正確辨識。控制點測量完成后,要及時制作控制點點位分布略圖、控制點點位信息表,準確描述每個控制點的方位和位置信息,便于內業刺點使用。
特別說明① 像點標志
在整個像控布設環節,像控標志類型、尺寸大小及和布設位置至關重要。①標志的類型首先,從用途來說,像控點是模型成果坐標轉換的依據。其反映在技術流程上,外業中,需要實測標志點平面坐標和高程;內業中,在空中三角測量環節,用于像片刺點。因此,像控標志的識別度、反射光的程度、與周邊地物色差大小都是需考慮的。除了道路已有交通標志線角點和明顯清晰線性地物交點,下圖是三類親測好用的標志類型:
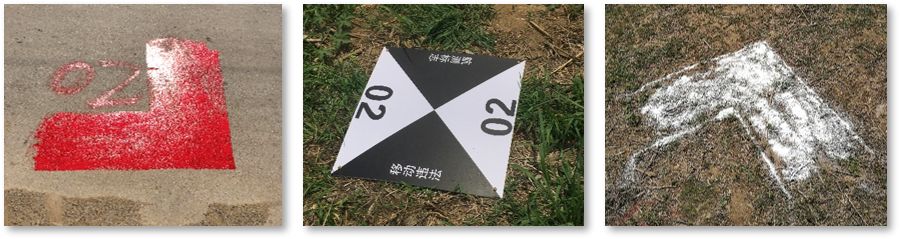
②標志尺寸以無人機的空中視角來說,地面標志相當小,不同分辨率的照片對地面標志的大小要求不同,經實踐測試,地面分辨率2-3公分時,地面標志宜在60cmX60cm以上的尺寸,在無人機拍攝的像片上才能清晰可見。③位置選擇以五鏡頭相機為例,其傾斜角度一般為45度,傾斜視線很容易被遮擋,除了大樹、高樓和途徑車輛,還會被高莖雜草、電力線所遮蓋,當高空拍攝像片時,以像素為單位進行處理,因此,在選擇點位時,需避開上述遮擋物。另外,為防止人為破壞,布設可移動標志時還需考慮盡量遠離人為活動頻繁區域。

特別說明② 布設流程
①像控預布設在項目準備階段,需要對測區概況有所了解。通常借助衛星圖進行像控點位的預布設,秉持“角點布設,中間加密,均勻布設”的原則,設計像控點位。外業中,可通過手機定位實現預設點位“放樣”。
②像控實地測設將預先布設的點位,放樣至實地,并于電子地圖標記位置、拍攝照片作為點之記,以便后續查找、對照和檢查。坐標采集多采用RTK獲取。
③點位補測在工程實際中,像控標志被人為毀壞或遮蓋的情況屢見不鮮,因此需要做好事后點補測工作,保證該處有點,以便構建區域網,達到控制誤差累積的效果。
④像控數據檢查其一、檢查本地坐標點位是否與已有地形圖坐標系一致,相對位置關系是否正確。像控坐標成果好壞至關重要,需及時檢查,以免坐標系不符合要求或點位、點號錯誤。 其二、檢查像片上是否清晰可見像控標志。如像控標志被遮蓋或毀壞的問題,可通過查看對應位置像片,及時檢查出來,進而提出外業補救方案。
⑤內業刺點刺點,即在多視角、多幅像片上精確標記出同名控制點的位置。后續通過空中三角測量解算,將整體坐標糾正至本地坐標系或其它平面坐標系。刺點原則可概括為,“虛實結合像素點、不刺過曝像片、不刺像片邊緣”,盡量多鏡頭像片皆刺點。

4.空中三角測量
以ContextCapture (Smart3D)自動建模系統為例,講解空中三角測量的相關要求。
4.1 像片刺點
將野外測量的控制點信息,按照實際位置刺到自動建模系統中,這個工作叫做像片刺點。刺點位置一般是十字交叉的中心、直線的左右角點或直角的內角點,如斑馬線的左右角點,根據影像分辨率和斑馬線的寬度,估算角點所占的像素,把影像縮放到合適的大小完成刺點。
4.2 空三計算
該系統中空三計算是自動完成,采用光束法區域網整體平差方法進行。即以一張像片組成的一束光線作為一個平差單元,以中心投影的共線方程作為平差單元的基礎方程,通過各光線束在空間的旋轉和平移,使模型之間的公共光線實現最佳交會,將整體區域最佳地嵌入到控制點坐標系中,從而恢復地物間的空間位置關系。
4.3 空三精度
在《數字航空攝影測量空中三角測量規范》中,對相對定向中像片連接點數量和誤差有明確的規定,但在無人機傾斜攝影空三中沒有相對定向的信息,單個連接點的精度指標也未體現,不能完全照傳統空三那樣去挑粗差點,可以從像方和物方兩個方面來綜合評價空三的精度。物方的精度評定比較常用,就是對比加密點與檢查點( 多余像片控制點,不參與平差) 的坐標差; 像方的精度評定,通過影像匹配點的反投影中誤差來進行控制。空三常規的精度指標只能表現整體的精度范圍,卻不能看到局部的精度問題,通過外方位元素標準偏差更能全面的表現。通俗來講,空三運算的質量指標包括: 是否丟片,丟的是否合理; 連接點是否正確,是否存在分層、斷層、錯位; 檢查點誤差、像控點殘差、連接點誤差是否在限差以內。
5.三維模型質量
無人機傾斜攝影測量技術能夠提供三維點云、三維模 型、真 正 射 影 像 ( TDOM) 、數 字 表 面 模 型( DSM) 等多種成果形式,其中三維模型具備真實、細致、具體的特點,通常稱為真三維模型。可以將這種實景三維模型當做一種新的基礎地理數據來進行精度評定,包括位置精度、幾何精度和紋理精度 3 個方面。
5.1 位置精度
三維模型的位置精度評定跟空三的物方精度評定有類似之處,通過比對加密點和檢查點的精度進行衡量。在控制點周邊比較平坦的區域,精度比對容易進行; 在房角、墻線、陡坎等幾何特征變化大的地方,模型上的采點誤差比較大,精度衡量可靠性降低,可以聯合影像作業,得到最終的成果矢量或模型數據再進行比對。
5.2 幾何精度
傳統手工建模可以自由設計地物的幾何形狀,而真三維自動化建模,影像重疊度越大的地方地物要素信息越全,三維模型的幾何特征就越完整。反之,影像重疊度不夠可能出現破面、漏面、漏縫、懸空、樓底和房檐拉花等情況,影響地物幾何信息的完整表達。這種屬于原理性問題,無法完全避免,可以按照下面的方法進行評定。在三維模型瀏覽軟件中參照航拍角度固定瀏覽視角,同時拉伸到與實際分辨率相符的高度去查看模型,看不出明顯的變形、拉花即可判定為合格,反之為不合格。
5.3 紋理精度
真三維建模完全依靠計算機來自動匹配地物的紋理信息,由于原始影像質量不同,導致匹配結果可能存在色彩不一致、明暗度不一致、紋理不清晰等情況。要提高紋理精度就必須提高參加匹配的影像質量,剔除存在云霧遮擋覆蓋、鏡頭反光、地物陰影、大面積相似紋理、分辨率變化異常等問題像片,提高匹配計算的準確度。
6.結 語
隨著我國科技和經濟的迅猛發展,無人機傾斜攝影測量技術的應用也更加廣泛。討論和制定無人機傾斜攝影測量的技術標準將極大促進這項技術的規范應用,更好地為國家建設服務。目前,文中僅提出了一些想法,還需在今后的工作中繼續學習、實踐、改進。
審核編輯 :李倩
-
測量技術
+關注
關注
1文章
188瀏覽量
24703 -
自動化
+關注
關注
29文章
5562瀏覽量
79240 -
無人機
+關注
關注
229文章
10420瀏覽量
180139
原文標題:探討 | 從硬件到軟件,無人機傾斜攝影測量技術標準
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
科技防線:無人機干擾系統如何保障空域安全 特信無人機反制
無人機干擾設備:應對非法飛行的科技盾牌!特信無人機反制
無人機信號傳輸技術的原理及分類
無人機遭遇“神秘殺手”:揭秘反無人機技術的崛起

第四集 知語云智能科技無人機反制技術與應用--無人機的組成與工作原理
第三集 知語云智能科技無人機反制技術與應用--無人機的應用領域
第二集 知語云智能科技無人機反制技術與應用--無人機的發展歷程
第一集 知語科技無人機反制技術與應用--無人機的定義與分類
知語云智能科技揭秘:無人機威脅如何破解?國家安全新防線!
知語云智能科技無人機防御系統:應對新興威脅的先鋒力量
知語云智能科技:反制無人機新篇章—全景監測與激光打擊的尖端技術
無人機全景監測:空域管理的新革命
震撼發布!知語云智能科技引領革新,全景反制無人機系統破繭而出!
針對無人機成像應用的鏡頭設計






 工商網監
工商網監
評論