 EcuM是如何知道有喚醒事件呢?
EcuM是如何知道有喚醒事件呢?
前言
在AUTOSAR中,Ecu的喚醒流程并不能簡單的看作是對各個外設模塊的供電動作。Autosar給了軟件開發人員很大的自由度去設計目標項目Ecu的喚醒動作,而自由度越大的代價就是開發人員需要很好的設計Ecu的喚醒時序,提供Ecu喚醒過程的魯棒性。
喚醒源的狀態
在EcuM中規定了喚醒源的4中狀態:NONE、PENDING、VALIDATED、EXPIRED。四種狀態關系的切換關系如下所示:
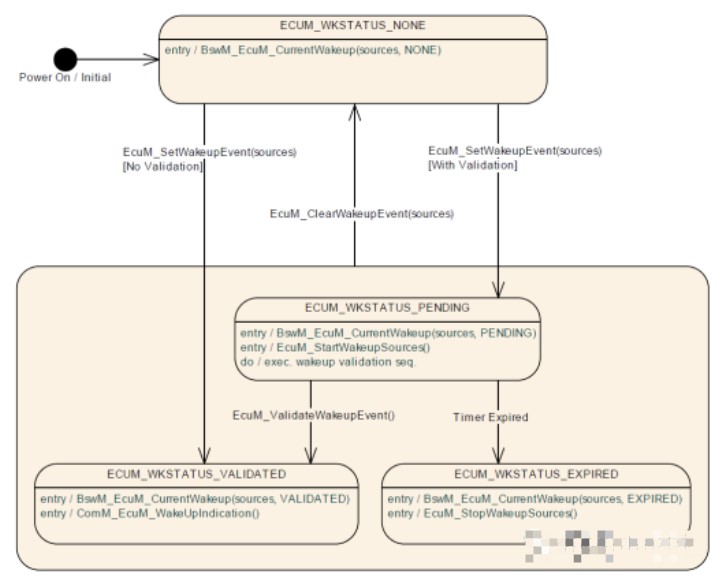
當Ecu上電時,喚醒源的初始狀態是NONE,當喚醒源狀態切換到NONE時,需要通知到BswM模塊,上圖也可以看出,喚醒源的每次狀態切換都需要通知到BswM模塊,通知接口:BswM_EcuM_CurrentWakeup。
EcuM是如何知道有喚醒事件呢?EcuM如果想知道有喚醒Ecu的事件,最好的方式就是給底層提供一個接口或者注冊一個回調,Autosar里規定了標準接口:EcuM_SetWakeupEvent。當有喚醒事件發生時,底層的硬件模塊(例如:Transceiver、Sensor)最先識別到,之后通過該接口上報給EcuM。
EcuM主函數會輪詢檢測底層上報的喚醒事件,如果想進一步的分析喚醒事件是不是有效的總線喚醒源(網絡管理報文),需要Ecu有正常的收發報文能力,想要收發報文,Transceiver和Controller兩個模塊均需要啟動。一般來講,Transceiver會在程序初始化時進入正常的工作模式,而Controller進入正常的工作模式是EcuM調用EcuM_StartWakeupSources的結果,而該接口的內部功能的實現由開發者自行把控,autosar并未做硬性的要求。
啟動Transceiver和Controller,建立了報文的正常收發能力,Ecu即可進一步的將報文上報上層模塊,如:CanIf,即此時Ecu可以拿到總線的RawData,不管是不是網絡管理報文,Ecu都可以做進一步的功能實現,如收到診斷報文喚醒網絡等。
一般來說,會在EcuM模塊配置兩個時間參數,CheckWakeup和ValidateWakeup時間,如果CheckWakeup時間走完走完沒有判斷到有效的喚醒源,則調用EcuM_StopWakeupSources關閉喚醒源,這里多數關閉controller,進而Ecu失去通信能力。
ValidateWakeup時間參數配置與否決定了是否使用喚醒事件的驗證功能,如果配置該參數,且驗證喚醒事件有效后則通知ComM使能通信,調用ComM接口:ComM_EcuM_WakeupIndication。如果該參數沒有配置,則EcuM不在繞圈,直接通知BswM喚醒事件有效,通知ComM開啟通信。個人理解:該參數配置較合理。
第一:可以驗證喚醒事件的有效性,避免因總線抖動等干擾造成的非預期Ecu喚醒;
第二:如果使用的Transceiver沒有Pn功能,Ecu會因總線的擾動而不斷的喚醒,假設總線有應用報文沒有網絡管理報文,ValidateWakeup時間給0,Ecu將會不斷的走上下電流程,如果下電選擇OFF流程(實際項目中很多開發人員沒有開啟Reset流程的Operation,即直接冷啟動,這不符合autosar規范,也不安全),將會帶來未知問題(如果Ecu內核有一定時間內喚醒次數限制,超過閾值則可能上鎖保護),設置該參數可以有效的延遲Ecu喚醒頻率。
審核編輯:劉清
-
接口
+關注
關注
33文章
8617瀏覽量
151316 -
總線
+關注
關注
10文章
2890瀏覽量
88145 -
AUTOSAR
+關注
關注
10文章
362瀏覽量
21618
發布評論請先 登錄
相關推薦
【AI技術支持】ESP32-C3-MINI-1U模組睡眠模式下喚醒死機問題

干貨分享 | TSMaster—LIN 喚醒與休眠機制

請問esp32c6 wifi6 twt如何在程序里知道CPU已經喚醒?
藍牙模塊喚醒原理是怎樣的?
三星貼片電容規格有哪些呢?怎么選擇呢?

stm8s halt之后無法喚醒怎么解決?
stop mode下怎么實現按下矩陣鍵盤的任意鍵將系統喚醒呢?
操作FreeRTOS時,執行__WFI()導致系統滴答中斷無法喚醒設備怎么解決?
PC端打開串口助手,怎么會影響到STM32的WKUP喚醒呢?
DCM模塊喚醒網絡主動與被動喚醒機制探討






 工商網監
工商網監
評論