 節點喚醒等于網絡喚醒嗎?
節點喚醒等于網絡喚醒嗎?
前言
如果當前節點有網絡管理,我給的答案很明確,不是!之所以要寫這個主題,是因為實際工作中,接觸的很多工程師對這兩個概念有點混淆,因此本文侃侃這兩個概念。注意,本文基于節點有網絡管理的前提進行討論。
Autosar EcuM
Autosar的模塊劃分很細,分工也很明確,也正因如此才使得軟件有了層次,即分層。同時,也使得抽象模塊具有更好的跨平臺移植性。
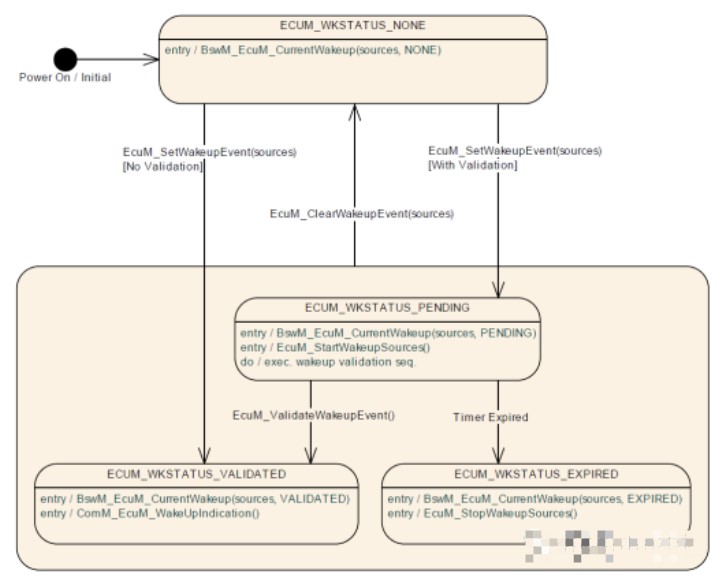
這里說一下EcuM模塊,本文不講EcuM功能,但為什么提EcuM呢?EcuM即Ecu Manager,這樣直白的解釋,我們應該清楚了,EcuM就是管理Ecu的。Autosar中,EcuM使用Phase、Mode、State表示Ecu各個狀態,每個層級對內對外可見性不同,EcuM狀態圖如下所示:
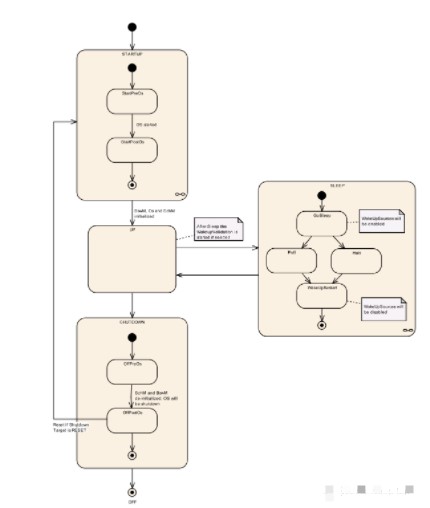
由上圖是不是可以看出什么?這既是我們常說的“
節點喚醒
說的更具體一點就是EcuM切換到Run Phase時,節點喚醒。如果要從外部評判節點喚醒,就是外設功能供電且正常工作,可以在電源中看到電流達到正常的工作電流。但此時網絡喚醒了嗎?
Autosar xxNM
這里xx指總線類型,CAN/Flexray/Ethernet等。本例以CANNM為例討論。剛才提到EcuM進入RUN Phase階段即我們常說的“節點喚醒”,和網絡喚醒等價嗎?說到這里,我們應該都清楚了,這本就不是一回事。節點喚醒不能看作是網絡喚醒。而且Autosar也給了我們很明確的答案,不然為什么又會分出CANNM呢?
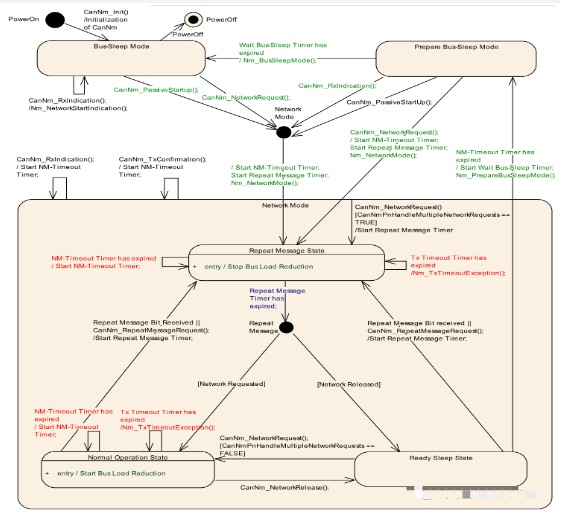
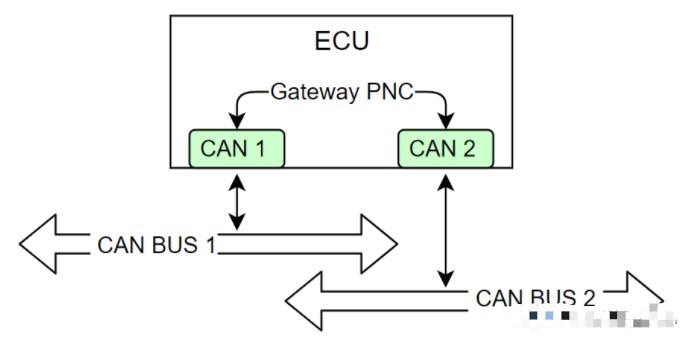
如上圖,這個答案給的是不是更明確一些,CANNM和EcuM干的就不是一件事,因此也就不能將兩者等價。由上圖可以看出,EcuM上電,網絡從Bus Sleep Mode切換到Network Mode需要有附加條件,一般是如下兩種情況滿足其一,第一有網絡主動請求(CanNm_NetworkRequest()),第二網絡有被動喚醒請求(CanNm_PassiveStartup())。如果沒有外部請求,網絡會一直在Bus Sleep Mode狀態呆著,如果用Canoe等設備監控,可以看到當前節點不發任何報文到總線上,只能接收總線報文(EcuM在RUN Phase階段時)。
總結來說,就是EcuM處于RUN Phase階段是網絡能進入Network Mode的充分必要條件。換成我們常說的就是:
節點喚醒是網絡喚醒的充分必要條件
說到這里我們應該對這兩個概念有了一定認知,如果當前節點有網絡管理,且收到網絡管理報文喚醒網絡,那么總線必須先有一幀報文喚醒Ecu,Ecu進入了RUN Phase階段,收到的網絡管理報文才能送到上層模塊(如EcuM,BswM,ComM,NM等),進而上層才能決定開啟通信,報文才能外發到總線。如果收到非網絡管理報文,Ecu會喚醒,也可以理解為Ecu被供電(主程序被周期調度),因為不是有效喚醒源,之后Ecu走下電流程。至于Ecu收到非網絡管理報文保持Ecu喚醒多久取決于系統需求。
審核編輯:劉清
-
電源
+關注
關注
184文章
17761瀏覽量
250650 -
CAN
+關注
關注
57文章
2756瀏覽量
463879 -
AUTOSAR
+關注
關注
10文章
362瀏覽量
21619
發布評論請先 登錄
相關推薦
CAN總線指定幀喚醒的硬件實現方式
干貨分享 | TSMaster—LIN 喚醒與休眠機制

基于冗余節點休眠和分階段喚醒策略的傳感器網絡三維覆蓋控制方法
多目標固定中繼節點喚醒策略
Java實現遠程開關機(網絡喚醒)

語音喚醒技術的對比,語音喚醒技術哪家強
EcuM是如何知道有喚醒事件呢?
無線喚醒在灌溉系統上的應用

DCM模塊喚醒網絡主動與被動喚醒機制探討






 工商網監
工商網監
評論