 使用MathWorks為CAN實現一個分布式電子控制單元 (ECU) 網絡
使用MathWorks為CAN實現一個分布式電子控制單元 (ECU) 網絡
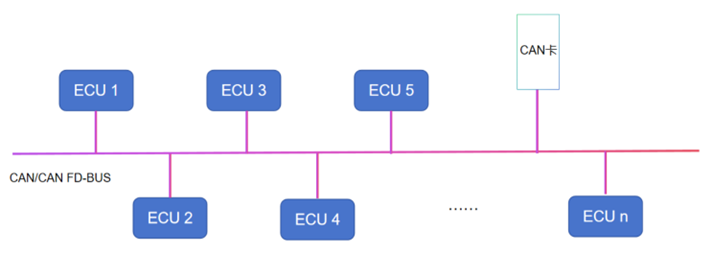
此示例在 Simulink 下使用 Vehicle Network Toolbox 為汽車上的 CAN 實現一個分布式電子控制單元 (ECU) 網絡。使用的 CAN 報文在 CAN 數據庫文件canConnectivityForVehicle.dbc中定義。 Vehicle Network Toolbox 提供了 Simulink 模塊,用于通過 Simulink 模型在控制器局域網 (CAN) 上傳輸和接收實時報文。此示例使用 CAN Configuration、CAN Pack、CAN Transmit、CAN Receive 和 CAN Unpack 模塊來執行 CAN 總線上的數據傳輸。
此示例使用了 MathWorks 虛擬 CAN 通道。但是,您可以將模型連接到其他支持的硬件。
模型說明
 ?
?
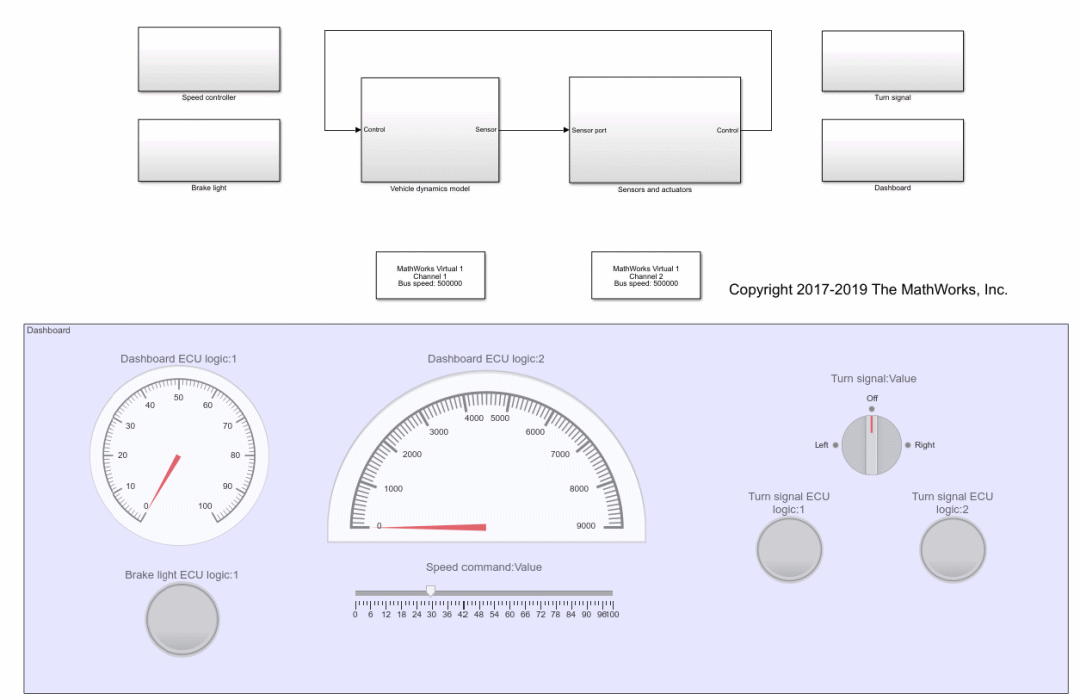
該模型由以下子系統組成:車輛動力學模型、傳感器和作動器、轉向信號、控制板、剎車燈和速度控制器。車輛動力學模型代表汽車(環境),其他子系統代表 CAN 總線上的各種節點。
車輛動力學模型
該子系統定義汽車的運動方程。輸入是節氣門體和制動踏板兩個作動器的位置。輸出是引擎 RPM 和車速,它們經過多路復用處理為單個信號。
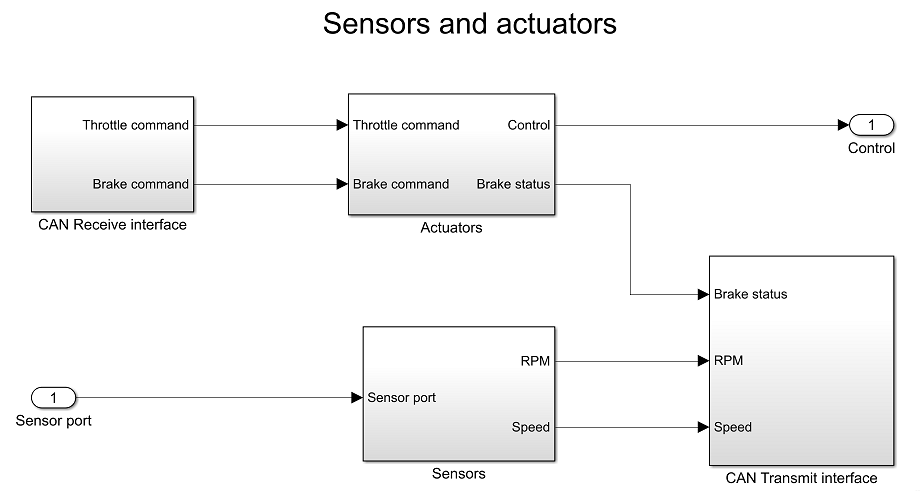
傳感器和作動器
 ?
?
該子系統包含節氣門體和制動作動器以及 RPM 和車速傳感器。作動器通過 CAN 總線接收節氣門和剎車命令。作動器輸出(控制)饋送到車輛動力學模型。 制動作動器還發送一個信號,通知是否執行了剎車。該信號以 100 Hz 采樣并傳輸到 CAN 總線。來自車輛動力學模型的引擎 RPM 和車速信號輸入到該子系統,并且還以 100Hz 采樣并傳輸到 CAN 總線。
控制板
控制板是車輛和駕駛員之間的接口。用戶可以使用滑塊設置所需的速度 (Speed command:Value)。可以使用旋轉開關操作轉向信號 (Turn signal:Value)。 速度命令和轉向信號狀態信號傳輸到 CAN 總線。從 CAN 總線讀取采樣的車速和引擎 RPM,并將其分別顯示在車速表和轉速表上。
速度控制器
速度控制器向作動器發送命令以將車速驅動到要求的值。從 CAN 總線讀取車速和所需的速度。節氣門和剎車命令由對應的離散比例積分控制器計算。作動器命令傳輸到 CAN 總線。
剎車燈
剎車燈子系統從 CAN 總線接收制動作動器狀態信號并相應地操作剎車燈。只要剎車啟動,剎車燈就會亮起。
轉向信號
轉向信號子系統從 CAN 總線接收轉向信號狀態報文并相應地激活轉向信號。當旋轉開關設置為“左側位置”時,左轉向信號燈周期性閃爍,當旋轉開關設置為“右側位置”時,右轉向信號燈周期性閃爍。
審核編輯:劉清
-
傳感器
+關注
關注
2551文章
51163瀏覽量
754155 -
CAN總線
+關注
關注
145文章
1952瀏覽量
130811 -
ecu
+關注
關注
14文章
887瀏覽量
54538 -
Simulink
+關注
關注
22文章
536瀏覽量
62433
原文標題:如何使用Simulink實現一個分布式電子控制單元 (ECU) 網絡
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
基于ptp的分布式系統設計
汽車電子控制單元(ECU)簡明指南
分布式通信的原理和實現高效分布式通信背后的技術NVLink的演進
電子控制單元(ecu)的作用有哪些?它是如何工作的?
如何實現EtherCAT分布式供電?

CAN總線在汽車領域的應用及挑戰
分布式大屏控制系統對網絡環境的要求
虹科方案|低負載ECU老化檢測解決方案:CAN/CAN FD總線“一拖n”





 工商網監
工商網監
評論