") 高速相機:工業(yè)領域的視覺檢測
高速相機:工業(yè)領域的視覺檢測
寫在前面
從第一次工業(yè)革命到第三次工業(yè)革命,再到現如今的工業(yè)智能化的技術發(fā)展,你會發(fā)現工業(yè)領域的技術變革,就像一個波浪式前進的上拋物線。
在低谷期是技術突破的瓶頸期,一旦過了那個階段,就會有飛躍式發(fā)展。
上一個非專業(yè)的函數圖進行說明吧
或許這樣會好理解一些
就好像工業(yè)視覺檢測,從最開始替代人工檢測變成2維空間視覺進行捕捉檢測,到如今的3D視覺檢測定位,每一次都是技術的革新推動生產力的發(fā)展。
面對疫情 不必恐慌
工業(yè)視覺系統(tǒng)是用于自動檢驗、工件加工和裝配自動化以及生產過程的控制和監(jiān)視的圖像識別機器。(來源于搜狗百科)
簡單來說,就是用機器視覺代替人的雙眼和大腦來工作。
工業(yè)視覺可以做什么
1、檢測
在工業(yè)領域,主要是產品外形和表面缺陷檢驗,如木材加工檢測、金屬表面視覺檢測、印刷電路板缺陷檢查、焊縫缺陷自動識別等。目前已經從二維升級到了3D視覺檢測,從平面到立體,檢測結果精準度更高。
2、識別
比如在醫(yī)學上的應用。機器視覺主要用于醫(yī)學輔助診斷。
3、測量
比如在橋梁檢測領域中的應用。人工檢測法和橋檢車法效率低,漏檢率高,實時性差,很難大幅應用。而基于機器視覺的檢測方法是利用CCD相機獲取橋梁表觀圖片,然后運用計算機處理后自動識別出裂縫圖像,并從背景中分離出來然后進行裂縫參數的計算的方法,具有很好的應用前景。
4、定位
比如在交通監(jiān)控領域中的應用上。比如說在重要的十字路口安放攝像頭,就可以利用攝像頭的快速拍照功能,實現對違章、逆行等車牌的車牌進行自動識別、存貯,以便相關的工作人員進行查看。
工業(yè)視覺如何實現
視覺檢測工作原理,盡管機器視覺應用各異,但都包含以下幾個過程:
①圖像采集:光學系統(tǒng)采集圖像,將圖像轉換成數字格式并傳入計算機存儲器。
②圖像處理:處理器運用不同的算法來提高對檢測有影響的圖像因素。
③特征提取:處理器識別并量化圖像的關鍵特征,例如位置、數量、面積等。然后將這些數據傳送到控制程序。
④判別和控制:處理器的控制程序根據接收到的數據做出結論。
工業(yè)視覺檢測的優(yōu)勢
1
效率更高
2
準確性更高
3
總體成本更低
4
總體成本更低
5
數字化統(tǒng)計管理
6
可適用于危險的檢測環(huán)境
7
不會對產品造成接觸損傷
8
總體成本更低
9
避免二次污染
10
總體成本更低
關于視覺檢測中的雙目相機
下圖為3D視覺檢測中各類型在不同維度的對標(僅供參考)
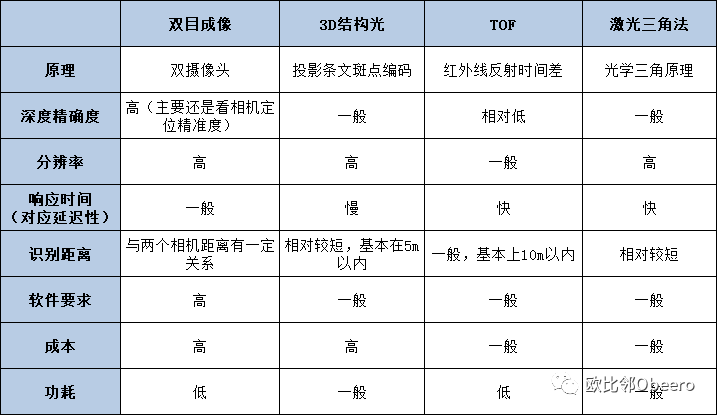
由于目前3D視覺檢測有4種主流模式,這里主要說基于雙目攝像測量的模式,雙目測量的視覺檢測,其實之前就有,只不過有時候有些流水線生產并不是很需要,但是有些行業(yè)對這個產品精準度要求比較高,比如汽車行業(yè)里面的:油封視覺檢測系統(tǒng),發(fā)動機彈簧疏密方向視覺檢測系統(tǒng),發(fā)動機彈簧顏色視覺檢測系統(tǒng),汽車發(fā)動機氣門桿視覺檢測系統(tǒng),活塞卡環(huán)檢測系統(tǒng),汽車后視鏡視覺檢測系統(tǒng),這些都需要3D視覺檢測才能更精準一些,而且多數也傾向于選擇雙目攝像頭進行測量。
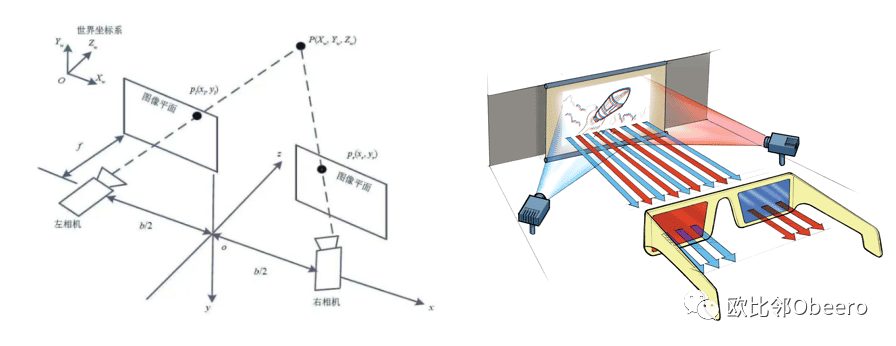
↑上圖為雙目相機的立體視覺圖
如果不好直觀理解,可以想一下3D眼鏡給你的感受,差不多道理
基于雙目相機的3D檢測,因為兩部相機所以會有兩個傳感器,這樣可以分別得到兩組圖像的深度信息,這樣建立一個三維坐標系,通過已知的傳感器之間的距離,來計算被檢測對象的深度信息。這個就是跟我們人眼的深度感知原理類似,人眼的左右兩只眼睛可以分別看到一幅圖像,并且兩幅圖像是有差異的,尤其同一個物體是有差異在里面的,大腦就可以計算出兩只眼睛之間的差異,而深度學習的那個系統(tǒng)就是模仿的大腦寫的一組代碼去判別。
關于這個雙目相機,歐比鄰·奧視得倍的UM系列動作捕捉相機、GM系列動作捕捉相機都可以應用,GM相機清晰度、精準度更高一些,UM系列相機更輕便更便攜。兩者都有可以提供二次開發(fā)SDK,用戶基于SDK可以進行個性化產品設計,其定位精準度都達到亞毫米級別,具體選擇還是要看大家的具體需求。關于本公司的這兩款相機,具體參數,可以點擊下方鏈接進行了解。歡迎有相關領域需要的單位找我司溝通具體的技術產品應用。
GM系列動作捕捉相機
UM系列動作捕捉相機
文中部分內容整理來源于網絡,如有侵權,請聯(lián)系刪除。
原文標題:高速相機|工業(yè)領域的視覺檢測
文章出處:歐比鄰Obeero 歡迎添加關注!文章轉載請注明出處。
審核編輯 黃昊宇
-
3D
+關注
關注
9文章
2875瀏覽量
107488 -
視覺檢測
+關注
關注
2文章
377瀏覽量
19229
發(fā)布評論請先 登錄
相關推薦

深視智能高速相機觀測水滴滴落過程#高速相機 #高清高速相機 #高速工業(yè)相機 #工業(yè)相機 #機器視覺 #傳感器

機器視覺系統(tǒng)硬件組成之工業(yè)相機篇

光源---助力工業(yè)相機在視覺檢測中的應用
網絡研討會: Teledyne FLIR IIS Forge 5GigE高速高精度機器視覺工業(yè)相機

精密制造的革新:光譜共焦傳感器與工業(yè)視覺相機的融合
Dragonfly S 5MP工業(yè)相機量產 機器視覺應用的新選擇
索尼FCB-EV9500L模組:工業(yè)檢測領域的高清視覺利器

深度學習在工業(yè)機器視覺檢測中的應用
什么是工業(yè)機器視覺?它有哪些作用?
高速機器視覺行業(yè)市場分析







 工商網監(jiān)
工商網監(jiān)
評論