 一個直接用于項目開發的PID庫分享
一個直接用于項目開發的PID庫分享
當然有了!現在我就準備給大家安利一下了。一般同學會去某度上搜,看到各種各樣版本的PID示例,或者去GitHub上白嫖。
其實一些芯片公司會提供一些控制領域的解決方案了,這里面就會包括PID庫。
比如ST的"ST Motor Control Sdk",或者TI的C2000系列的control suite。
不過目前TI官方對于control suite已經不再提供相應的更新,可以繼續下載這個套件.
目前control suite已經更新為C2000WARE-MOTORCONTROL-SDK.
那本文主要介紹TI的control suite,這里面除了PID外有很多控制類算法,并且配置了豐富的文檔。
如何安裝?
進入ti的官網,輸入control suite進行搜索,就可以找到相應的安裝包。
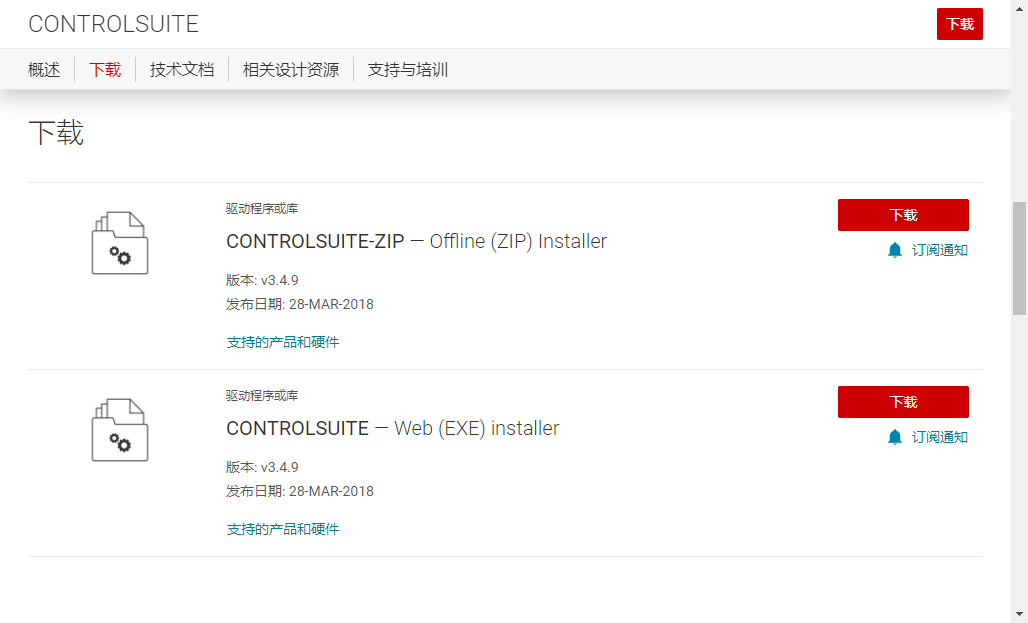
這里有離線安裝包,和在線安裝包。直接基于在線安裝包進行操作即可。我們先下載安裝包。

下面就是一路瘋狂點擊Next即可;
 界面 1
界面 1 界面 2
界面 2 界面 3
界面 3 界面 4
界面 4 耐心等待
耐心等待 安裝成功
安裝成功源碼和文檔
進入主界面,這里基本的例子都是基于TI的C2000系列的MCU進行開發的,具體如下圖所示;
 主界面
主界面進入主界面之后,我們可以看到左側這邊包含了軟硬件文檔,項目示例還有相應的文檔。

其實我們要找的是基于C2000系列MCU的數學算法庫,可以在下列列表中找到;
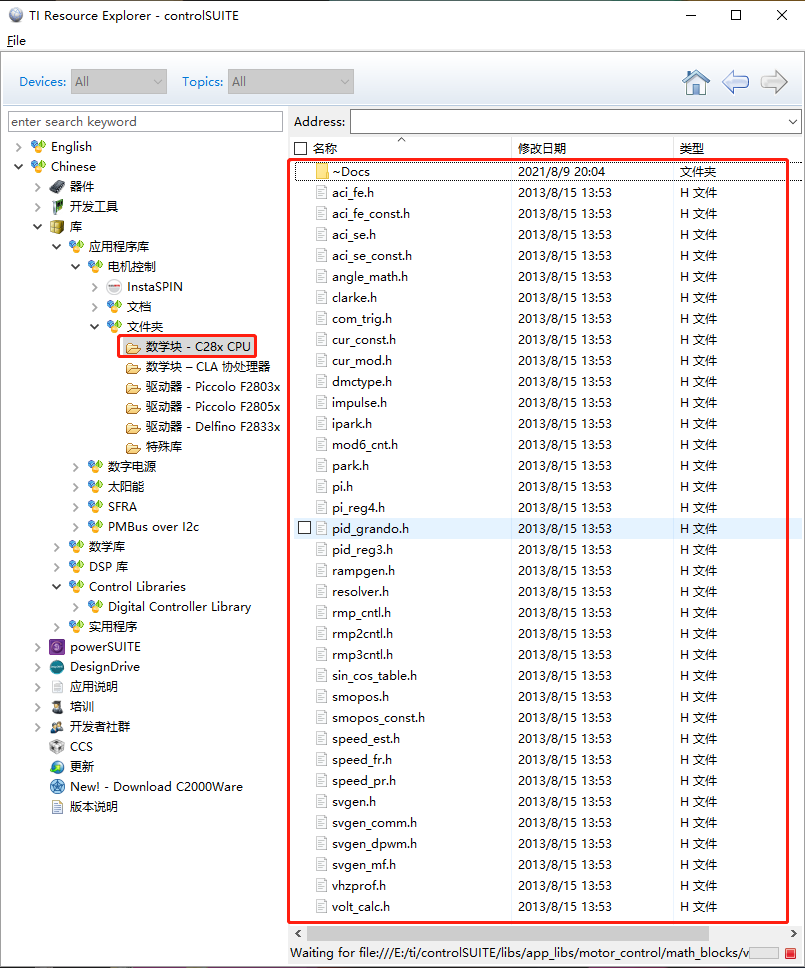
當然也可以在安裝目錄C: icontrolSUITElibsapp_libsmotor_controlmath_blocksv4.2下面找到相應的PID算法;
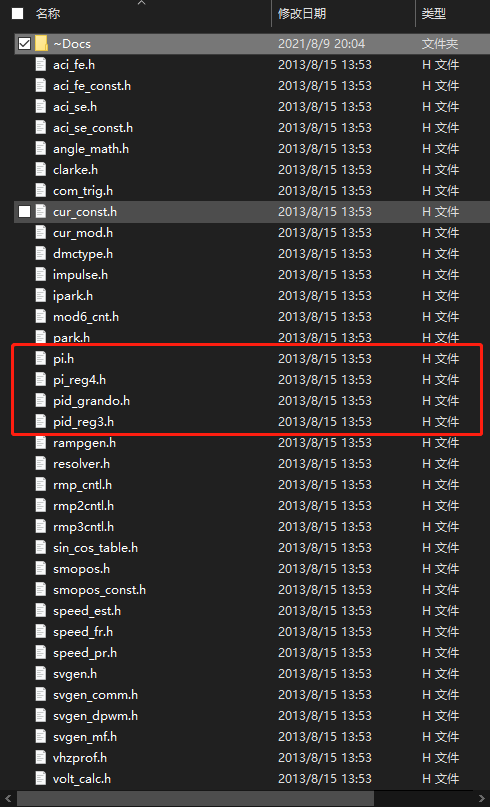
至于如何使用這幾個文件,這里也提供了相應的文檔,在Docs中找到,
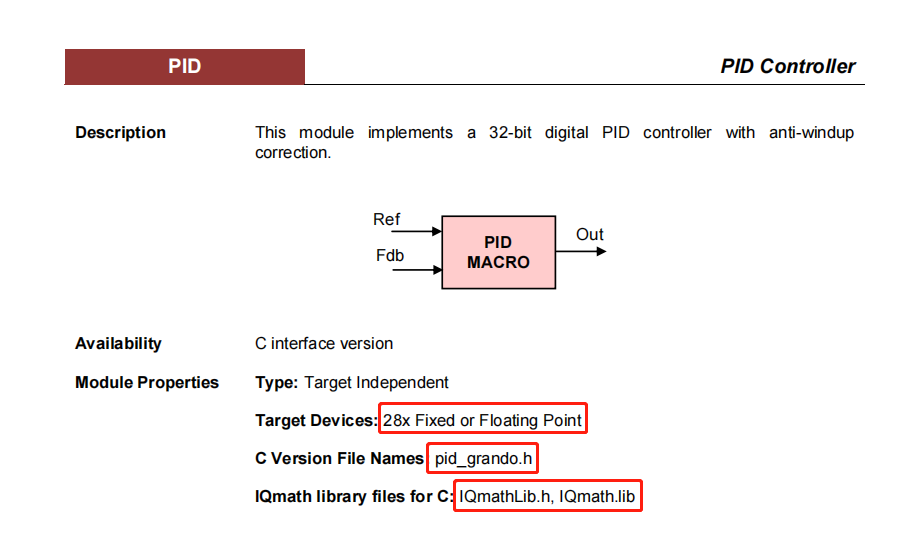
例如pid_grando.h文件,這里介紹了對應的平臺,當然是TI系列的MCU,并且依賴于IQMath庫,其實這里我們做一些簡單的改動,就可以移植到自己所需的平臺上去了,具體源碼如下:
/*=================================================================================
Filename:PID_GRANDO.H
===================================================================================*/
#ifndef__PID_H__
#define__PID_H__
typedefstruct{_iqRef;//Input:referenceset-point
_iqFbk;//Input:feedback
_iqOut;//Output:controlleroutput
_iqc1;//Internal:derivativefiltercoefficient1
_iqc2;//Internal:derivativefiltercoefficient2
}PID_TERMINALS;
//note:c1&c2placedheretokeepstructuresizeunder8words
typedefstruct{_iqKr;//Parameter:referenceset-pointweighting
_iqKp;//Parameter:proportionalloopgain
_iqKi;//Parameter:integralgain
_iqKd;//Parameter:derivativegain
_iqKm;//Parameter:derivativeweighting
_iqUmax;//Parameter:uppersaturationlimit
_iqUmin;//Parameter:lowersaturationlimit
}PID_PARAMETERS;
typedefstruct{_iqup;//Data:proportionalterm
_iqui;//Data:integralterm
_iqud;//Data:derivativeterm
_iqv1;//Data:pre-saturatedcontrolleroutput
_iqi1;//Data:integratorstorage:ui(k-1)
_iqd1;//Data:differentiatorstorage:ud(k-1)
_iqd2;//Data:differentiatorstorage:d2(k-1)
_iqw1;//Data:saturationrecord:[u(k-1)-v(k-1)]
}PID_DATA;
typedefstruct{PID_TERMINALSterm;
PID_PARAMETERSparam;
PID_DATAdata;
}PID_CONTROLLER;
/*-----------------------------------------------------------------------------
DefaultinitalisationvaluesforthePIDobjects
-----------------------------------------------------------------------------*/
#definePID_TERM_DEFAULTS{
0,
0,
0,
0,
0
}
#definePID_PARAM_DEFAULTS{
_IQ(1.0),
_IQ(1.0),
_IQ(0.0),
_IQ(0.0),
_IQ(1.0),
_IQ(1.0),
_IQ(-1.0)
}
#definePID_DATA_DEFAULTS{
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(1.0)
}
/*------------------------------------------------------------------------------
PIDMacroDefinition
------------------------------------------------------------------------------*/
#definePID_MACRO(v)
/*proportionalterm*/
v.data.up=_IQmpy(v.param.Kr,v.term.Ref)-v.term.Fbk;
/*integralterm*/
v.data.ui=_IQmpy(v.param.Ki,_IQmpy(v.data.w1,(v.term.Ref-v.term.Fbk)))+v.data.i1;
v.data.i1=v.data.ui;
/*derivativeterm*/
v.data.d2=_IQmpy(v.param.Kd,_IQmpy(v.term.c1,(_IQmpy(v.term.Ref,v.param.Km)-v.term.Fbk)))-v.data.d2;
v.data.ud=v.data.d2+v.data.d1;
v.data.d1=_IQmpy(v.data.ud,v.term.c2);
/*controloutput*/
v.data.v1=_IQmpy(v.param.Kp,(v.data.up+v.data.ui+v.data.ud));
v.term.Out=_IQsat(v.data.v1,v.param.Umax,v.param.Umin);
v.data.w1=(v.term.Out==v.data.v1)?_IQ(1.0):_IQ(0.0);
#endif//__PID_H__
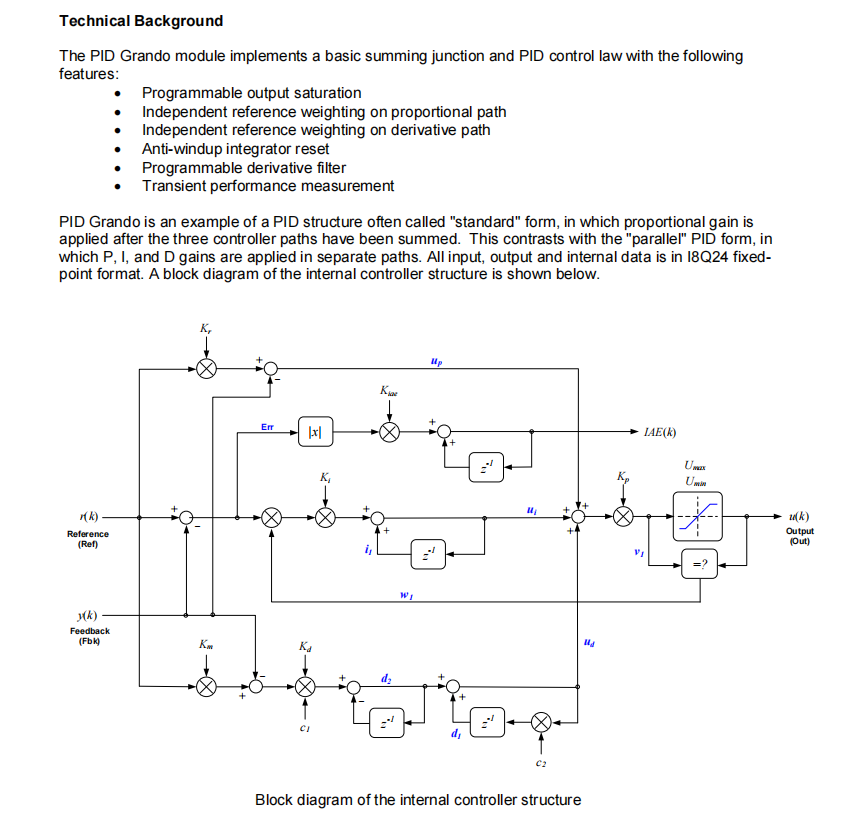
這里面不僅僅做了積分抗飽和,還有對微分環節的濾波處理,所以應用到項目中是沒有問題的。
代碼中需要了解Q格式的相關的知識,可以參考一下我的這篇文章《一文教你搞懂C語言的Q格式》;
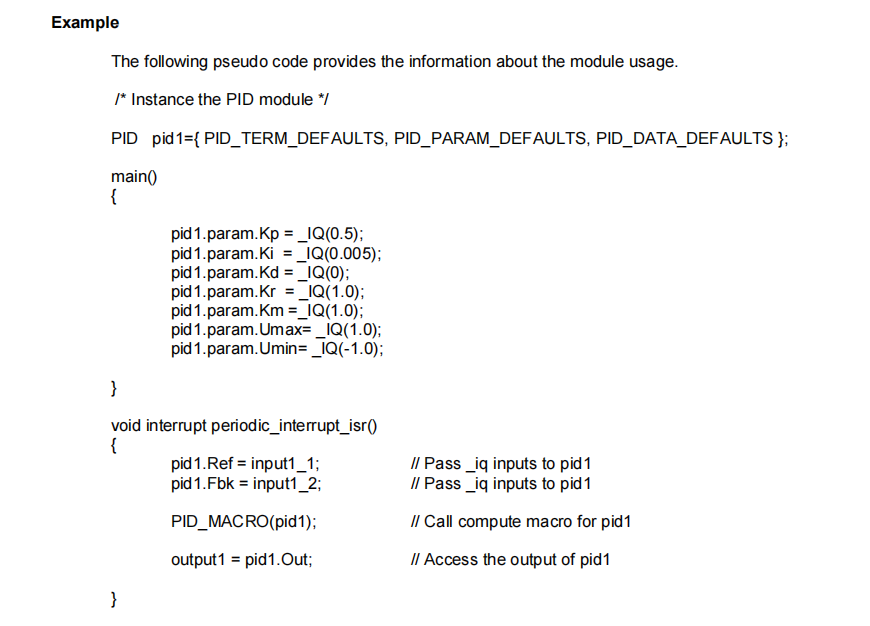
另外,這個路徑下的文檔中,還提供了相應的Example,以及PID的信號流圖,具體如下所示:
審核編輯 :李倩
-
mcu
+關注
關注
146文章
17301瀏覽量
352131 -
PID
+關注
關注
35文章
1473瀏覽量
85692 -
C語言
+關注
關注
180文章
7614瀏覽量
137378
原文標題:分享一個直接用于項目開發的PID庫!很好用,附下載!
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
適用于MySQL和MariaDB的Python連接器:可靠的MySQL數據連接器和數據庫

【敏矽微ME32G070開發板免費體驗】\\+Lora通信終端產品開發項目
HAL庫在STM32開發中的重要性
如何使用Python實現PID控制
如何選擇合適的PID控制器
在焊接中應用PID控制技術
PID控制器的類型和選擇指南
PID控制的優缺點分析 PID參數調節的常見方法

第九章-PID整定方法 STM32PID驅動編碼器 STM32PID控制電機轉速

第13章-循跡功能 STM32智能小車循跡教程 PID循跡算法分析






 工商網監
工商網監
評論