 基于仿生人工微管系統 為微納機器人架起一座“專用高速公路”
基于仿生人工微管系統 為微納機器人架起一座“專用高速公路”
用微納機器人精準遞送藥物一直是科學家想實現的目標,從實際應用的角度來看,如果讓微納機器人自主或借助外場操控,實現自己走到病灶,或者達到人體內的精準位置釋放藥物,無論從應用還是基礎研究都是一種巨大的進步。
但這是一條充滿荊棘的道路,對此,德國康斯坦茨大學物理系博士后顧紅日打了一個比喻:“這就像是在風雨交加的天氣中,想通過無人機把快遞送到遙遠的村莊。”
遠途、環境障礙、是否可控,每一道關卡都讓實現“安全、平穩地運輸”充滿不確定性。但實際上,將尺度縮小幾千倍到微納尺度,微納機器人實現精準遞送藥物比無人機送快遞的情況復雜得多、難度也更大。
近期,蘇黎世聯邦理工學院和賓夕法尼亞大學團隊設計開發了一種仿生人工微管系統,這是一種由磁性顆粒組成的嵌入式微纖維,其“細而長”的形狀與頭發絲類似,寬度80微米、高度40微米,長度則可以達到幾厘米。
在微納尺度下,該人工微管為微納機器人走得更穩、更精準提供了新方案,相當于在血管的復雜環境中,為微納機器人架起一座“專用高速公路”。與現有的磁性微納機器人相比,使用這種人工微管可將其運行速度提升1個數量級,未來有望應用在人體血管中遞送藥物時發揮其穩定的優勢。
該論文第一作者兼共同通訊作者為蘇黎世聯邦理工學院顧紅日博士(現德國康斯坦茨大學物理系博士后),共同通訊作者還包括賓夕法尼亞大學物理與天文學系阿諾德·J·T·M·馬蒂森(Arnold J. T. M. Mathijssen)助理教授、蘇黎世聯邦理工學院機器人與智能系統研究所布蘭德利·尼爾森(Brandly Nelson)教授。
“給微納機器人腳上穿上吸鐵石”
當前,國內外很多課題組都在研究微納機器人,并在成像、材料、驅動、控制和導航等方面取得進展,但微納機器人的主要技術難點在于,難以做到三個部分的“完美平衡”。
第一,微納機器人體積有限,因此必須確定在它身上放哪種材料。以磁性微納米機器人為例,為使其在磁場中保持更加有力、高速的運動,就需要強磁性材料作為保障。
第二,可承載遞送藥物的具體定量。第三,由于微納機器人在體內是無線移動狀態,因此達到精準追蹤和控制的目的,制備微納機器人的材料還需滿足在X光下可顯影被看到。
顧紅?日表示:“這三部分其實都要搶占微納米機器人上寶貴而有限的空間,因此如何來平衡這三部分就變成了一道難題。但實際上,并不是說將這三部分集成在一起就可解決該問題。”
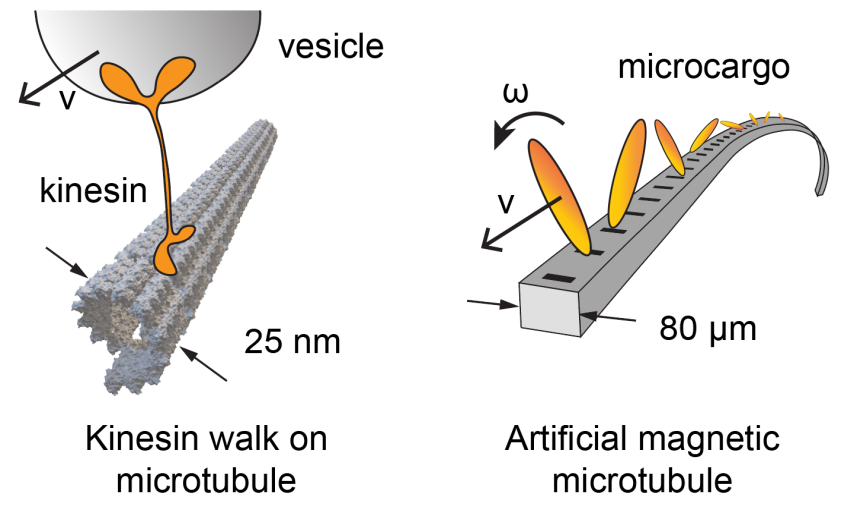
▲圖丨細胞微管的主動傳輸(左)和人工微管(右)(來源:Nature Machine Intelligence)
既然空間和效率是繞不過去的難題,該團隊于是提出,是否跳出這三部分非此即彼的局限,而通過一種外界輔助的方法,來讓微納機器人更穩定和精準呢?考慮到目前一些相關的介入手術已非常成熟,通過在人體血管直接插入導管就可實現體內導航,比如在心臟或大腦動脈瘤放入支架。
因此他們想通過類似的方案——通過人工微管的輔助,讓微納機器人更精準地、更穩定地遞送將藥物到更遠的位置。利用這種方案,該團隊在同樣磁性材料的情況下,可以讓微納機器人在更高粘度的甘油中實現了“逆流而上”、走得更快,并且無需在載藥量方面做出讓步。
“仿生人工微管最重要的作用是解決了微納機器人在人體內穩定性的問題,讓我們不需要高頻率的主動控制和追蹤微納機器人,只需了解其大概位置即可。”顧紅日說。
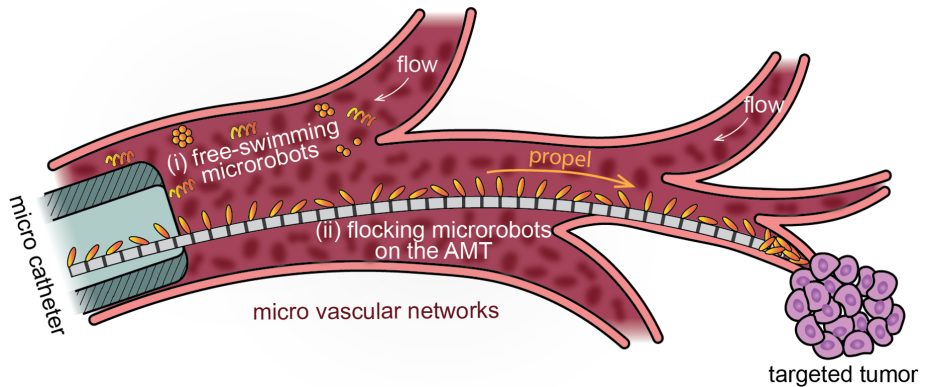
▲圖丨在微血管網絡中應用人工微管的使用場景。首先,將微導管(直徑~0.5mm)插入至其無法進入較小血管的極限處。然后,將人工微管(直徑~0.05mm)推出,并以磁性方式將其引導至細小的血管分支,并通過驅動微型載藥機器人到達目標腫瘤。與自由游動的微型機器人(i)相比,微型機器人沿 人工微管(ii)的運輸速度更快、更穩健(來源:Nature Machine Intelligence)
可靠、精準地將藥物遞送到目標位置是微納機器人的難點,即便有非常好的控制方案,但對微納機器人來說,一旦“走失”或脫離了原本的工作范圍,對人體來說都是一種危險的情況。
從實際應用的角度來看,如果微納機器人不可控,那么可能會出現像脫落的血栓一樣隨著血液飄走,在肺中形成肺栓塞或在心臟造成心肌梗塞等情況,這些風險在應用中都是不可被接受的。
該研究最重要的突破在于通過仿生人工微管方案,使微納機器人遞送藥物變得更加可靠,并排除了微納機器人可能飄走等不確定因素。“通過該方案,微納機器人與人工微管周期性的互相強烈吸引,這就像是給微納機器人的腳上穿上吸鐵石,因此使用人工微管后微納機器人在血液的一定流速范圍內是非常穩定、可靠的。”顧紅日說。
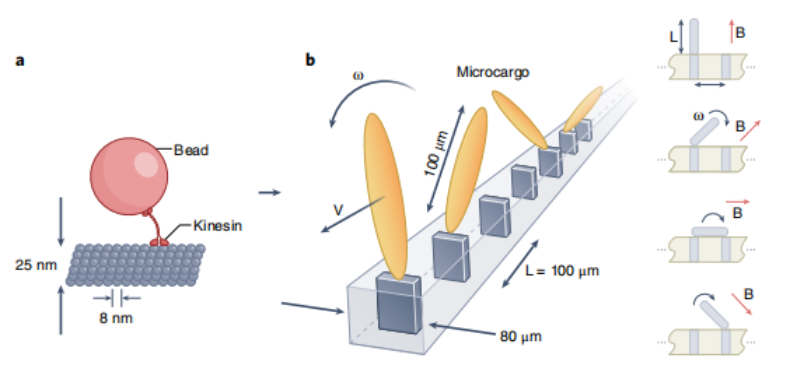
▲圖丨沿天然和人造微管運輸。a)生物微管是由蛋白微管蛋白制成的極性圓柱形細絲,微貨物被運動蛋白驅動蛋白單向拉動;b)人造微管是具有周期性磁性包裹體陣列的纖維,在外部旋轉磁場的驅動下,磁性微型貨物沿著這些纖維前進。注意這兩種情況下不同的特征長度尺度(來源:Nature Machine Intelligence )
微納機器人在人類血管內遞送,相當于從大樹衩向小樹杈行走的過程,而通過人工微管,可以讓它走得更深遠、更準確,如果可多前進一步,就能讓給藥的精度提高一倍,減少藥物對其他健康細胞和組織的副作用。
該研究歷經約三年時間,對于該結果研究人員也頗為意外。“沒做研究之前,我們沒有想到結果會這么好,微納機器人在同樣的磁場轉速下,速度提升至之前方案的10倍,并且還可保持穩定的運動。”顧紅日說。
他表示,如果有一排馬達蛋白,它們都往一個方向拉,這個速度就會變得更快。“我們在實驗中也有類似的發現,所以和生物系統的互動即便是完全不同的機理,但是卻有一定的相似度,從基礎學科角度看這個發現也非常有趣。”
離產業化尚有距離,有望應用于遞送藥物
精準醫療、智慧醫療是近年來較多地被提及的詞語,微納機器人未來如果落地應用,那么以部分自動化來解放醫生繁重的工作壓力、節省醫生手術時間方面將發揮重要的作用。
磁場驅動系統一個較大的優勢在于,不需要醫生在手術現場,可通過手術機器人進行相關手術。這樣避免了醫生穿著厚重的鉛衣,并減少X光線對他們長年累月的輻射。
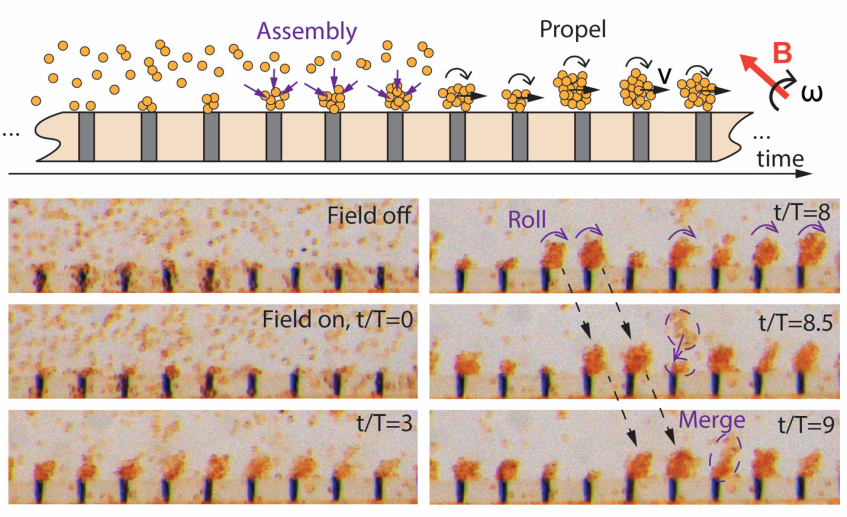
▲圖丨磁性顆粒在人工微管上的自主裝和團簇(來源:Nature Machine Intelligence)
目前,該人工微管技術尚在實驗室階段,距離產業化還有段距離。接下來,該團隊將一步步做相關的動物實驗和臨床的實驗。顧紅日認為,未來將微納機器人在臨床應用,必然離不開與醫生共同探索,然后進行各方面的改造與升級,將該工具用在某種疾病的具體治療方案中。
顧紅日也坦言,微納米機器人的產業化之路仍然“任重道遠”,他說:“微納機器人在醫療的應用是很明顯的方向,目前科研界也在向這個方向努力。但是實際上,打通科研與應用的鏈條非常長,需要耐心地探索和研究。”
與此同時,微納米機器人還面臨與常規醫療方案競爭、相關部門的監管審查等實際的問題。
從機電工程、醫療工程再到物理研究
對很多科研問題都感興趣,同時也有很多想法,他認為跨領域完成一件工作是充滿挑戰和有趣的。
顧紅日本科畢業于浙江大學機電工程系,在本科學習期間他還參加了東京工業大學的青年科學家交流計劃,從事微納加工和電共軛流體和微泵系統方面的研究。隨后,他在蘇黎世聯邦理工學院完成了碩士及博士階段的學習,師從布蘭德利·尼爾森(Bradley Nelson)教授。人工微管技術是他在博士期間的研究成果。
尼爾森教授作為業內最早開始從事微納機器人的研究學者之一,顧紅日也深受其影響。“他會在研究中提出很多重要的方向,并且實驗室的環境也非常多元,學術和應用方面的資源也豐富。”
據悉,近期尼爾森課題組關于磁控系統方面的技術也有新的產業化動態,他們成立了初創公司Nanoflex,并將這種磁性可操縱導管用于中風治療。
目前,顧紅日在康斯坦茨大學物理系從事博士后研究,合作導師為克萊門斯·貝欣格(Clemens Bechinger)教授,研究方向是活性的驅動和仿生。
從醫療工程方向轉向物理研究,看似無關,但也有一定關聯,實際上他所做的很多研究都與仿生相關。“對做工程的人來說,很多時候沒有好的方案,就好會去看大自然是如何解決的。深入地理解生物系統能讓我們設計更好的方案去解決現實的挑戰”他說,正因為這樣從機理上去發現和解決問題也是他的興趣所在,所以現在去研究更多有趣的問題、去探索那些看似瘋狂的想法。
-
機器人
+關注
關注
211文章
28512瀏覽量
207511 -
無人機
+關注
關注
230文章
10466瀏覽量
181052 -
智能系統
+關注
關注
2文章
394瀏覽量
72481
原文標題:基于仿生人工微管實現微納機器人對藥物的可靠遞送
文章出處:【微信號:Micro-Fluidics,微信公眾號:微流控】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
視頻監控系統的發展及在高速公路管理中的應用
機器變人類,你對仿生人持何看法?
四足仿生機器人
各種炫酷的仿生機器人
關于公路劃線機劃線導向機器人的設計
開源資料六足仿生機器人(原理圖+PCB+源碼等)
高速公路機電系統維修
UPS電源設備監控在高速公路中的作用
高速公路供配電系統的解決方案
如何保證高速公路供電可靠
高速公路巡檢機器人可以解決哪些問題?
AI加持,高速公路RPA機器人一體機全新升級亮相

AcrelEMS-HIM高速公路綜合能效系統在山東濟南至濰坊高速公路項目的應用






 工商網監
工商網監
評論