 中國汽車傳感器行業市場基本概念與分類
中國汽車傳感器行業市場基本概念與分類
中國汽車傳感器行業市場概述
基本概念與分類
傳感器的定義
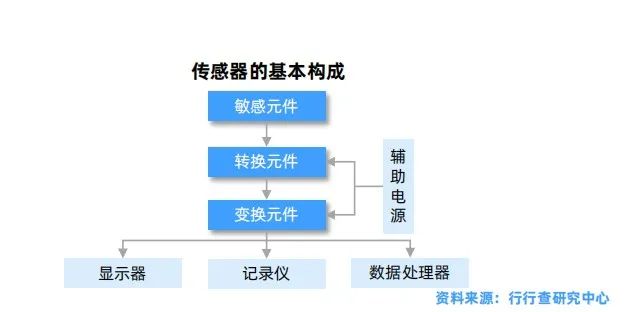
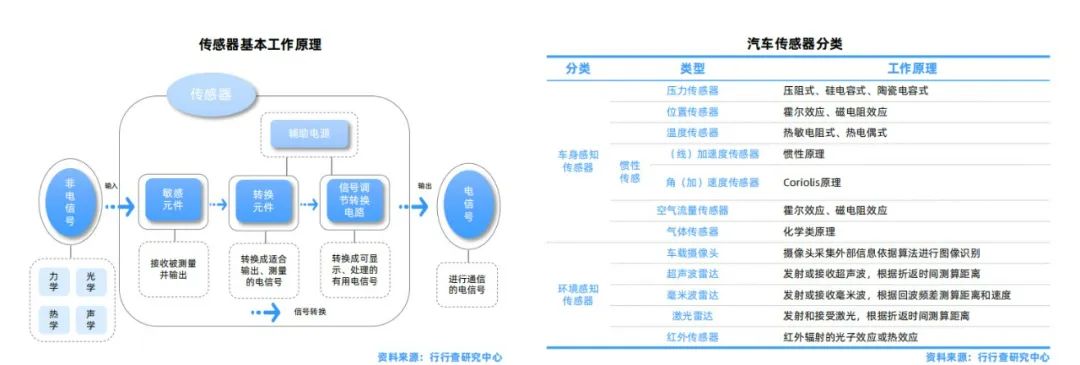
傳感器是一種檢測裝置,能感受到被測量的信息,并能將感受到的信息,按一定規律變換成為電信號或其他所需形式的信息輸出,以滿足信息的傳輸、處理、存儲、顯示、記錄和控制等要求。通常是由敏感元件、轉換原件、信號調節與轉換電路等其他輔助元件組成。敏感元件接受被測量并輸出與被測量成確定關系的其他量,轉換元件把來自敏感元件的其他量轉換成適合傳輸、測量的電信號,適合輸出、測量的電信號通過信號調節與轉換電路被轉換為可顯示、記錄、處理和控制的有用電信號,最后有用電信號被傳遞至其他裝置并進行通信。
傳感器的組成
敏感元件:直接感受被測量,并輸出與被測量成確定關系的某一物理量的元件。
轉換元件:傳感器核心元件,以敏感元件的輸出為輸入,把感知的非電量轉換 為電信號輸出。轉換元件本身可以作為獨立傳感器使用,叫做元件傳感器。
變換電路:把傳感元件輸出的電信號轉換成便于處理、控制、記錄和顯示的有 用電信號所涉及的有關電路。

汽車傳感器是把非電信號轉換成電信號并向汽車傳遞各種工況信息的裝置。汽車傳感器可根據使用目的不同分為車身感知傳感器和環境感知傳感器。車身感知傳感器提高了單車自身的信息化水平,使車輛具備感知自身的能力;按照輸入的被測量不同主要分為壓力傳感器、位置傳感器、溫度傳感器、線加速度傳感器、角加速度傳感器、空氣流量傳感器、氣體傳感器,從工作原理上看這些傳感器大都采用MEMS方案。環境感知傳感器實現了單車對外界環境的感知能力,幫助汽車計算機獲得環境信息并做出規劃決策,為車輛智能化駕駛提供支持;環境感知傳感器主要分為車載攝像頭、超聲波雷達、毫米波雷達、激光雷達以及紅外雷達等。
中國汽車傳感器行業發展歷程
研發周期較長,產品附加值高
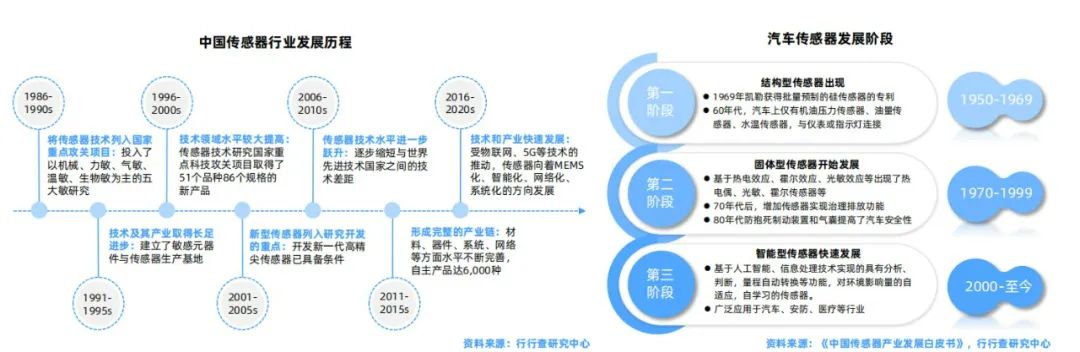
從國內產業的發展歷程來看,1986年國家將傳感器技術列入國家重點攻關項目,到2000年傳感器技術體系和產業初步建立,國產傳感器技術水平不斷進步。2016年以來,國內傳感器技術及產業快速發展,同時受國內物聯網、5G、人工智能等技術的推動,傳感器向著MEMS化、智能化、網絡化、系統化的方向持續發展。
汽車傳感器的發展階段分為結構型傳感器階段、固體傳感器階段、智能型傳感器階段。目前MEMS傳感器、智能型傳感器快速發展,廣泛應用于汽車、安防醫療等行業。汽車傳感器通常研發周期較長,如汽車MEMS類傳感器從設計研發到最終全面商業化平均耗時28年。在自動駕駛的層級結構中,汽車傳感器處于感知層,產品附加值高, 是實現單車智能駕駛的核心硬件。
中國汽車傳感器行業分類介紹
車身感知傳感器
車身感知傳感器遍布汽車全身,被廣泛應用于動力系統(新能源車是三電系統)、底盤系統、車身系統 ,實現對汽車自身信息的感知并作出決策、執行,是汽車的 “神經末梢”,目前發展較為成熟,以MEMS傳感器為主。
動力來源是新能源汽車與傳統燃油車的主要區別之一,新能源汽車的電子電氣架構主要使用電池、電機、電控有關的以電流為主的電磁類傳感器,燃油車動力系統則主要以測量壓力、溫度、氣體的傳感器為主;電磁類傳感器需求有望隨新能源汽車滲透率提高逐步放量。按照被測物理量的不同車身感知傳感器可分為壓力、位置、溫度、加速度、氣體、流量等各類傳感器。

環境感知傳感器
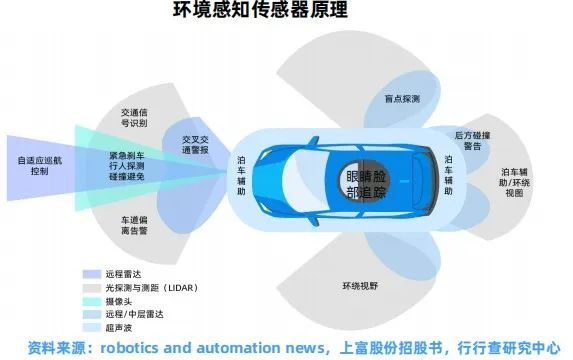
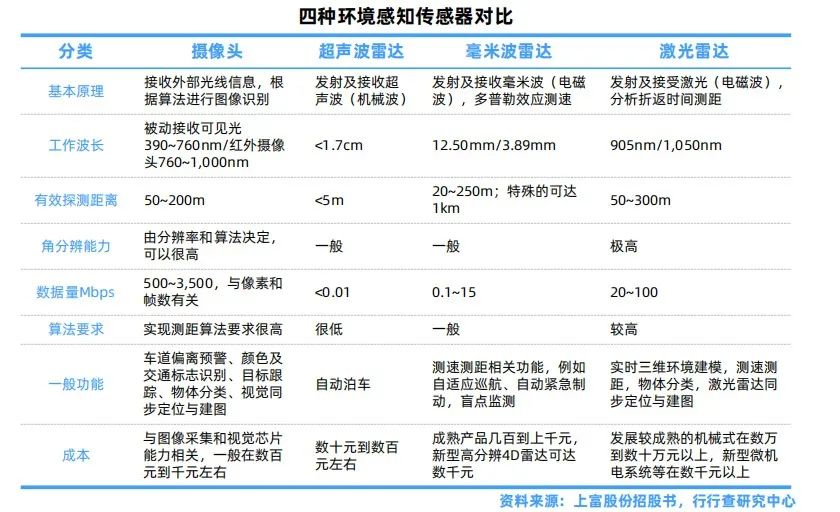
環境感知傳感器是在汽車安全技術從被動安全向主動安全演進的過程中產生的。感知傳感器主要功能為對車輛周身環境進行探測識別,可看作車輛的眼睛。而不同類型汽車智能駕駛感知系統的適用場景、受限場景、優缺點、成本等不同,彼此之間形成互補關系。環境感知傳感器捕捉外界信息并提供給汽車計算機系統用于規劃決策,主要包括激光雷達、車載攝像頭、毫米波雷達、超聲波雷達等。
汽車智能駕駛感知系統是汽車系統的感知層,將真實世界的視覺、物理、 事件等信息轉變成數字信號,為車輛了解周邊環境、制定駕駛操作提供基本保障,并為高級輔助駕駛系統的決策層提供準確、及時、充分的依據,進而由執行層對汽車安全行駛作出準確判斷。
車身感知:壓力傳感器
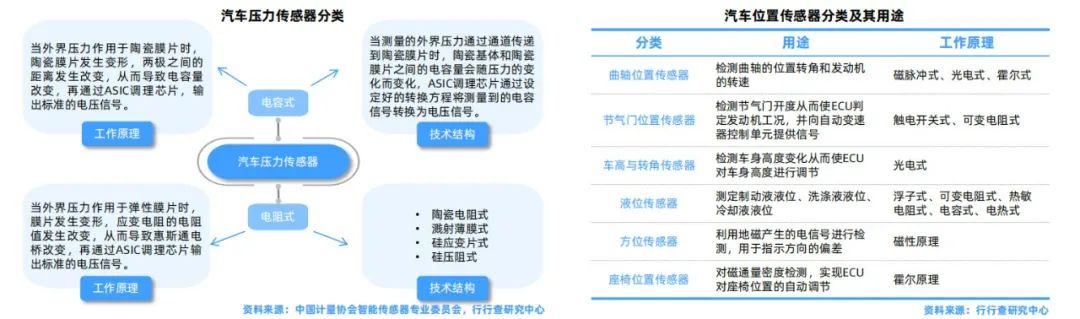
將壓力信號轉換為電信號的汽車壓力傳感器主要分為電容式和電阻式兩類。壓力傳感器是能夠感受壓力信號,并將壓力信號轉換成可用的電信號的裝置。根據壓敏元件的主流技術原理的不同,汽車壓力傳感器主要分為電容式壓力傳感器和電阻式壓力傳感器,通常應用于發動機的進氣歧管處、檢測大氣壓力變化、檢測渦輪增壓機的增壓壓力、檢測懸架系統的油壓、實時檢測輪胎壓力、測量氣缸內混合氣燃燒壓力等。
車身感知:位置傳感器
位置傳感器是測量元件運轉或運動所處位置的裝置。汽車位置傳感器的工作原理主要有霍爾效應、磁電阻效應、光電式、電容式、電熱式五種。根據用途不同可分為曲軸位置傳感器、節氣門位置傳感器、車高與轉角位置傳感器、液位傳感器、方位傳感器、座椅位置傳感器等。
車身感知:汽車溫度傳感器
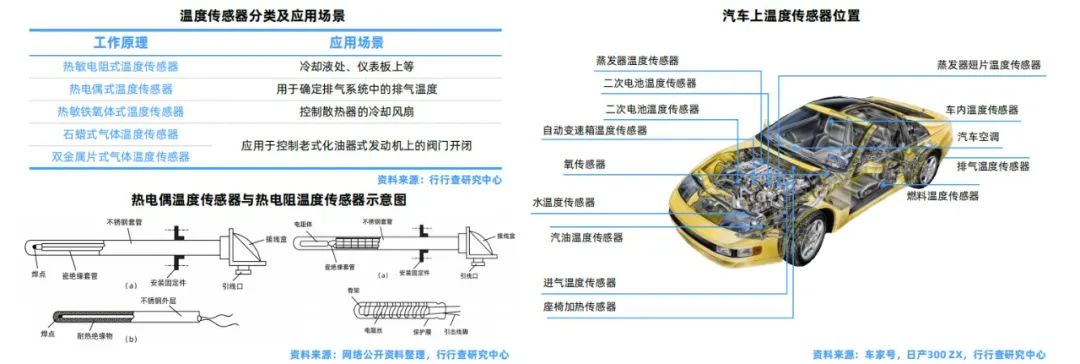
溫度傳感器:汽車上應用最廣泛的溫度傳感器是熱敏電阻式溫度傳感器。汽車溫度傳感器將溫度信號轉化為可用輸出信號,按照工作原理可分為熱敏電阻式、熱電偶式、熱敏鐵氧體式,其中熱敏電阻式溫度傳感器應用最為廣泛。根據應用場景的不同熱敏電阻式溫度傳感器可分為進氣溫度傳感器、冷卻液溫度傳感器、車內外溫度傳感器、 蒸發器出口溫度傳感器、排氣溫度傳感器等。
車身感知:汽車慣性傳感器
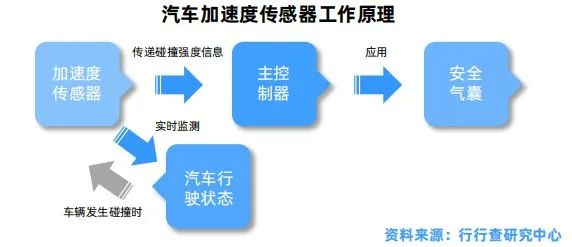
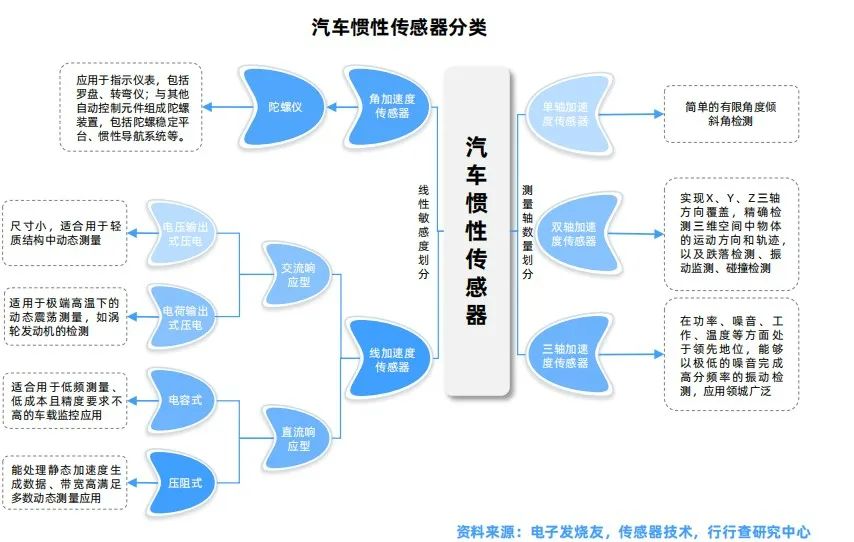
慣性傳感器是用于測量物體在慣性空間中運動參數的裝置。根據運動是否呈線性的工作原理,慣性傳感器分為線加速度傳感器和角加速度傳感器兩類;按測量軸數量分為單軸、雙軸、三軸加速度傳感器。將線加速度傳感器、角加速度傳感器與其他測量元件組合搭配可以滿足汽車安全控制及導航系統的需求,具體應用包括汽車安全氣囊、ABS防抱死剎車系統、電子穩定程序(ESP)、電控懸掛系統等。
(線)加速度傳感器:線加速度傳感器又稱加速度傳感器,是通過測量傳感器內部的慣性力并計算加速度數據的裝置。按照工作原理的不同加速度傳感器可分為交流響應型和直流響應型。交流加速度傳感器的感測機構通常使用壓電元件,分為電壓輸出式壓電傳感器和電荷輸出式壓電傳感器;直流加速度傳感器根據感測技術的不同可分為電容式和壓阻式。
角(加)速度傳感器:角加速度傳感器又稱角速度傳感器,實質是陀螺儀。陀螺儀是利用動量矩(自轉轉子產生)敏感殼體相對慣性空間繞正交于自轉軸的一個或兩個軸的角運動檢測裝置,可與加速度計共同構成慣性導航系統,是決定慣性導航系統精度的主要因素。
車身感知:空氣流量傳感器
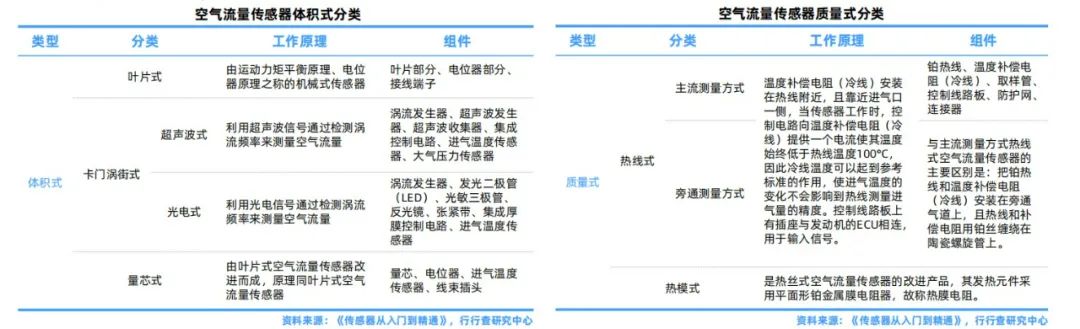
空氣流量傳感器又稱空氣體流量計,可用于檢測發動機進氣量大小,是電噴發動機最重要的傳感器之一。空氣流量傳感器通常安裝在進氣管上,將進氣量信號轉化為電信號傳遞給ECU,以供ECU確定噴油量和點火時間。對汽油噴射發動機進行電子調節,使其在各種旋轉條件下基本都能獲得最佳濃度的混合氣,需要測量每時每刻吸入發動機的空氣量,作為ECU計算(調節)噴油量的關鍵依據。如果空氣流量傳感器或電路出現故障,ECU得不到良好的進氣信號,就無法適當調整噴油量,會造成混合氣過濃或過稀,使發動機轉動異常,甚至會造成零部件損壞。空氣流量傳感器分為體積式和質量式,其中體積式包括葉片式、卡門渦街式、量芯式, 質量式包括熱線式、熱模式。
車身感知:氣體傳感器
氣體傳感器是檢測氣體的種類和濃度等信息的裝置。氣體傳感器按照技術原理的不同可以劃分為半導體氣體傳感器、固體電解質氣體傳感器、催化燃燒氣體傳感器、電化學氣體傳感器、光學氣體傳感器等;根據被測氣體的種類不同作用在汽車上的氣體濃度傳感器可以劃分為氧傳感器、NOX傳感器、稀薄混合氣傳感器、 煙霧濃度傳感器、柴油機煙度傳感器。

車身感知:MEMS方案
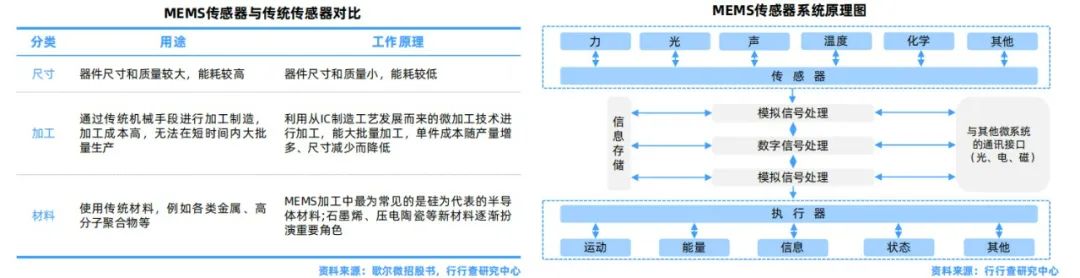
車身感知傳感器遍布汽車全身,被廣泛應用于動力系統(新能源車是三電系統)、底盤系統、車身系統,實現對汽車自身信息的感知并作出決策、執行,是汽車的“神經末梢”,目前發展較為成熟,以MEMS傳感器為主。MEMS系統即微機電系統,是指可批量制作的,集微型傳感器、執行器、機械結構、電源能源、信號處理、控制電路、高性能電子集成器件、接口、通信等于一體的微米或納米級器件或系統。MEMS傳感器是在微電子技術基礎上發展起來的多學科交叉的前沿研究領域。MEMS傳感器是采用微電子和微機械加工技術制造出來的新型傳感器。
與傳統的傳感器相比,它具有體積小、重量輕、成本低、功耗低、可靠性高、適于批量化生產、易于集成和實現智能化的特點。同時,在微米量級的特征尺寸使得它可以完成某些傳統機械傳感器所不能實現的功能。
MEMS傳感器沒有標準化的生產工藝流程,每種MEMS傳感器都是針對下游特定的場景來生產,按照工作原理MEMS傳感器可分為物理類、化學類、生物類,細分種類多樣、幾乎涵蓋車用傳感器的所有類型。
以MEMS壓力傳感器的制造過程為例,需要在硅片上通過氮化硅薄膜熱沉積、光刻、金屬離子注入等工藝制備出壓力敏感電阻與金屬的互連引線后,在硅片背面進行各向異性濕法腐蝕,通過調整腐蝕速率和時間來控制壓力敏感膜的厚度。最后用玻璃進行鍵合作為芯片的支撐架構。估計需要7-8層襯底,需要一層一層去做沉積、光刻、注入、腐蝕等過程,對溫度控制精度、應力的要求非常高。
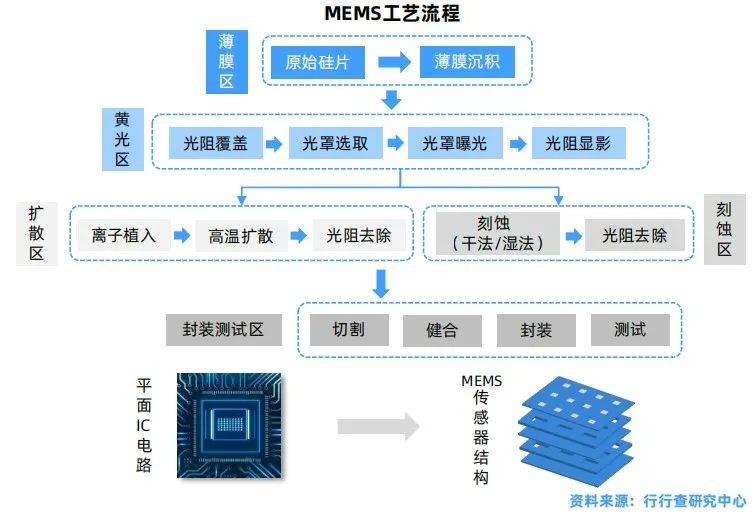
與大規模集成電路產品均采用標準的CMOS生產工藝不同,MEMS傳感器芯片本質上是在硅片上制造極微小化機械系統和集成電路的集合體,生產工藝具有較高的定制化特點。其技術先進性除了體現在MEMS傳感器芯片的設計難度之外,還體現在MEMS傳感器芯片生產工藝的可實現性方面。MEMS傳感器的領先廠商不但需要具備突出的極微小化機械系統和集成電路的設計能力,也需要開發不同傳感器芯片的生產工藝。

環境感知: 車載攝像頭
車載攝像頭:車載攝像頭以感光成像的方式為ADAS功能提供輸入。車載攝像頭是監控汽車內外環境、將光學信號轉換成電信號并呈現圖像以輔助駕駛員行駛的設備, 通常分為單目攝像頭、雙目攝像頭、廣角攝像頭,安裝在汽車的前視、環視、后視、側視、內置等各個部位。攝像頭的主要功能是感知外界環境,為碰撞預警、行人檢 測等ADAS(advanced driver assistance system,高級駕駛輔助系統)功能實現提供視頻信號輸入。
車載攝像頭主要由鏡頭組、圖像傳感器(CMOS)、數字圖像信號處理(DSP)組成,其中圖像傳感器是是車載攝像頭核心技術。鏡頭組、膠合材料、圖像傳感器經封 裝構成鏡頭模組,鏡頭模組將光電信號傳遞至DSP進行圖像信號處理;DSP將模擬信號轉化為數字信號,并與鏡頭模組封裝集成,形成終端系統。

CMOS圖像傳感器技術(CIS)是模擬電路和數字電路的集成,它是一種光學傳感器,是攝像頭模組的核心元器件,對攝像頭的光線感知和圖像質量起到了關鍵的影響。主要由四個組件構成:微透鏡、彩色濾光片(CF)、光電二極管(PD)、像素設計。根據元件的不同可以分為互補金屬氧化物(CMOS)半導體圖像傳感器及電荷耦合器件(CCD)圖像傳感器兩大類。典型的CMOS圖像傳感器(CIS)由多個模塊組成,分別完成不同的功能,其中像素陣列完成光電信號的轉換,將光學信號轉換為電學信號, 時序控制電路完成對電學信號的處理,數模轉換則將信號轉換為需要的數字信號便于最終輸出。

環境感知: 超聲波雷達
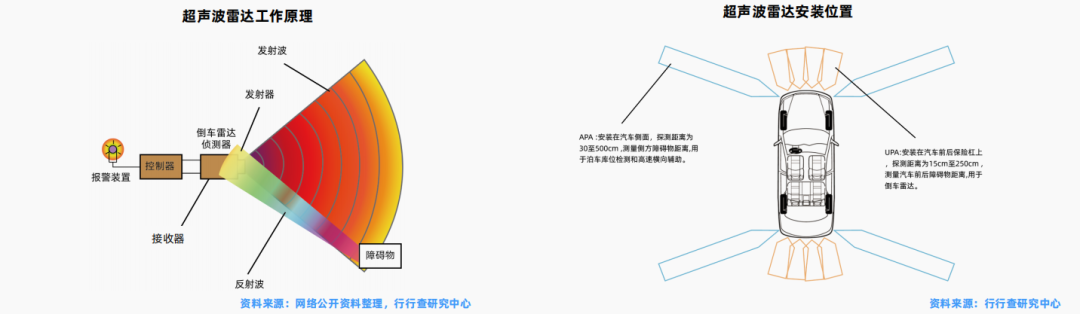
超聲波雷達:超聲波雷達常用于泊車輔助預警和汽車盲區碰撞預警,是自動泊車系統的主流傳感器。超聲波雷達的工作原理是向外發出并接收超聲波,根據超聲波的折返時間來測算距離。車用超聲波雷達的探頭工作頻率有40kHz、48kHz和58kHz三種,頻率越高、靈敏度越高、但探測角度越小,因此一般采用40kHz的探頭。
根據在汽車上的安裝位置不同超聲波雷達可分為 UPA(超聲波駐車輔助)和 APA(自動泊車輔助)兩種類型;UPA安裝在保險杠處以探測汽車前后障礙,APA安裝在車身側面以探測側方停車空間。單個UPA超聲波雷達探測距離在15~250cm之間,單個APA超聲波雷達30~500cm之間,探測范圍更遠。一套倒車雷達系統需要在汽車后保險杠內配備4個UPA超聲波傳感器,自動泊車系統需要在倒車雷達系統基礎上,增加4個UPA和4個APA超聲波傳感器,構成前4(UPA)、側4(APA)、后4 (UPA)的布置格局。
車載攝像頭在ADAS加速滲透的趨勢下,有望迎來量價齊升。L2及以下等級的汽車普遍搭載不超過8顆攝像頭,L3搭載8-12顆,L4、L5搭載12顆甚至更多數量的攝像頭。
目前市場中智能汽車的滲透度不高并且普遍處于L0-L2級,攝像頭的單車搭載數量普遍較低。2021年以來,ADAS功能加速普及,隨著多種L3級車型的乘用車上市并交付,智能駕駛逐漸從L2向L3邁進,單車搭載攝像頭數量有望增加。未來L4、L5成為主流車型后,單車攝像頭的平均數量有望進一步提升。
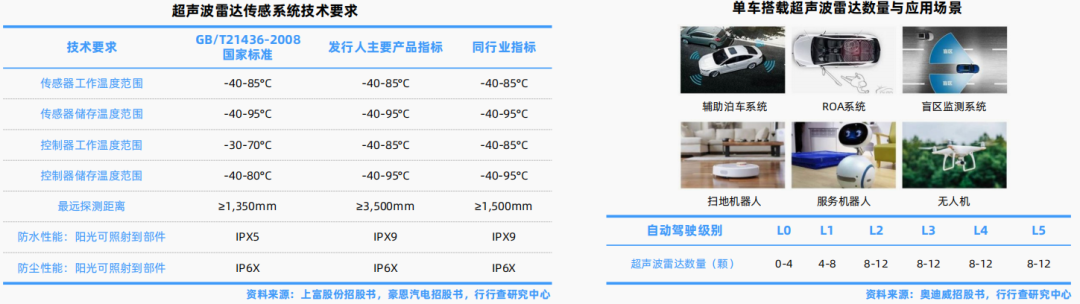
測距功能是超聲波傳感器最主要也是應用最廣泛的功能,用于感知障礙物或周圍環境位置、距離、液位、障礙物等的變化,是感知層的核心部件,主要應用領域包括汽車自動泊車輔助系統(APA系統)、代客泊車系統(AVP系統)、盲區檢測系統(BSD系統)、前碰撞預警系統(FCW系統)、倒車防撞雷達(PDC)、后排乘客監測系統(ROA系統)、掃地/工業機器人/無人機避障、液位探測、異物探測等。
環境感知: 毫米波雷達
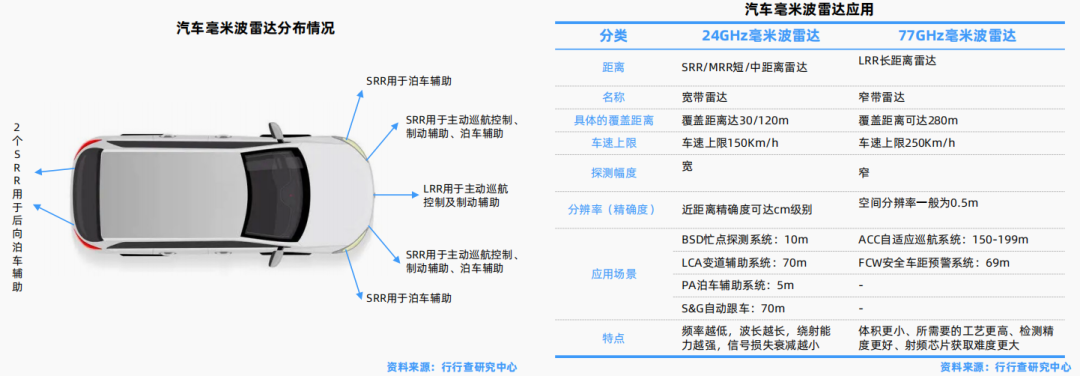
毫米波雷達:毫米波雷達是ADAS系統的重要組成部分,是實現汽車智能駕駛的重要裝置。毫米波雷達使用頻率30GHz-300GHz的毫米波對目標進行照射并接收回波,通過信號處理獲得目標與發射點的距離、方位、速度等信息。車載毫米波雷達多采用FMCW連續調頻式,通常有24GHz和77GHz兩種;按照測量距離劃分有短距的SRR、中距的MRR、長距的LRR,77GHz毫米波雷達通常安裝汽車正前方,用于對中遠距離物體的探測;24GHz毫米波雷達通常安裝在車側、后方,用于盲點檢測、輔助停車等。毫米波雷達目前已經廣泛應用于汽車的ADAS系統。
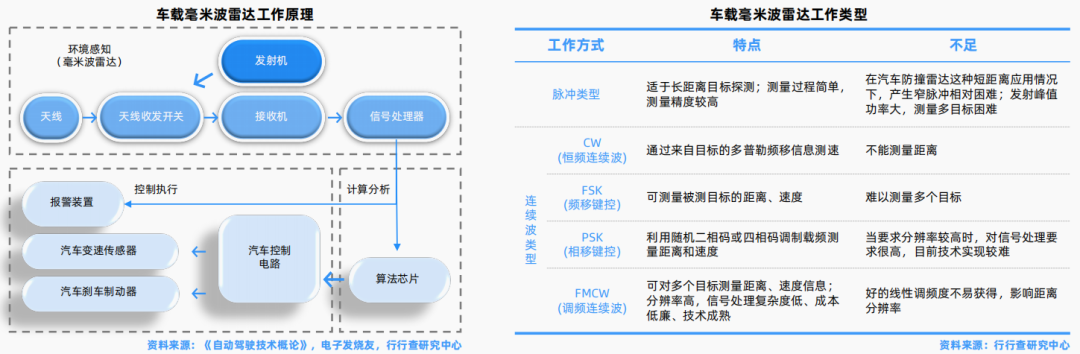
FMCW(調頻連續波)是最常用的車載毫米波雷達,德爾福、電裝、博世等Tier1供應商均采用FMCW調制方式。車載毫米波雷達通過天線向外發射毫米波,通過測量回波時間等參數測量障礙物的大小、速度、距離,毫米波雷達可以同時對多個目標利進行測量,獲取汽車周圍的物理環境信息。24GHz主要用于中短距探測,主要應用有盲點檢測、車道偏離預警、車道保持輔助、變道輔助、停車輔助等。77GHz主要面向100-250米的中長距探測,例如自適應巡航、碰撞預警指示、緊急剎車制動系列等。
環境感知: 激光雷達
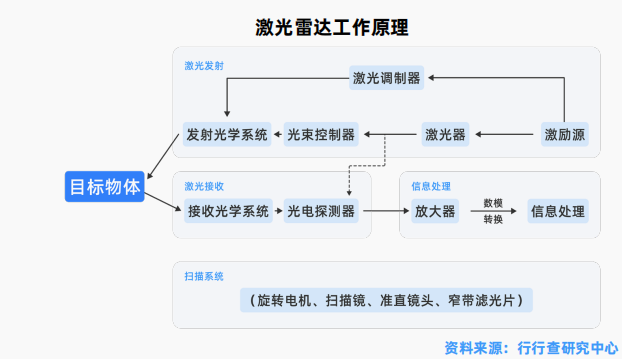
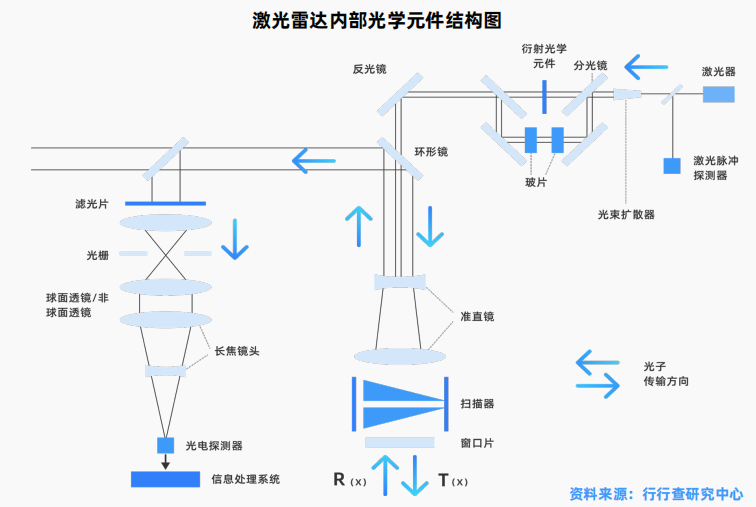
激光雷達:激光雷達(Laser Radar)是以發射激光束探測目標的位置、速度等特征量的雷達系統。其工作原理是向目標發射探測信號(激光束),然后將接收到的從目標反射回來的信號(目標回波)與發射信號進行比較,作適當處理后,就可獲得目標的有關信息,如目標距離、方位、高度、速度、姿態、甚至形狀等參數,從而對飛機、導彈等目標進行探測、跟蹤和識別。激光發射系統:激勵源驅動激光器發射激光脈沖,激光調制器通過光束控制器控制發射激光的方向和線數,最后通過發射光學系統,將激光發射至目標物體;激光接收系統:經接收光學系統,光電探測器接受目標物體反射回來的激光,產生接收信號;信息處理系統:接收的信號經過放大處理和數模轉換后,經過信息處理模塊計算,獲取目標表面形態、物理屬性等特性,最終建立物體模型;掃描系統:以穩定的轉速旋轉起來,實現對所在平面的掃描,產生實時的平面圖信息。
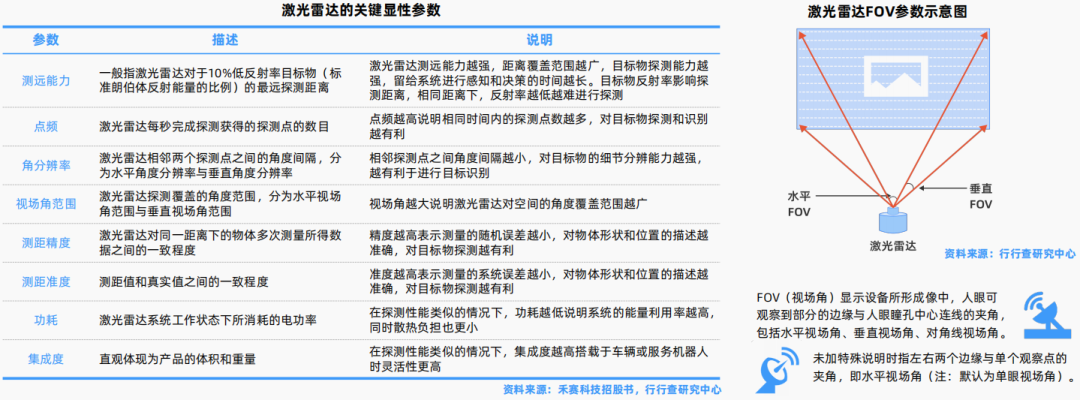
激光雷達產品主要從顯性參數、實測性能表現及隱性指標等方面進行評估比較。目前由于激光雷達屬于市場新興產品,實測性能和隱形指標目前缺乏量化和可靠公開數據指引。顯性參數主要包含測遠能力、點頻、角分辨率、視場角范圍、測距精準度、功耗、集成度(體積及重量)等,可以較為直觀的反應激光雷達不同方面的性能。
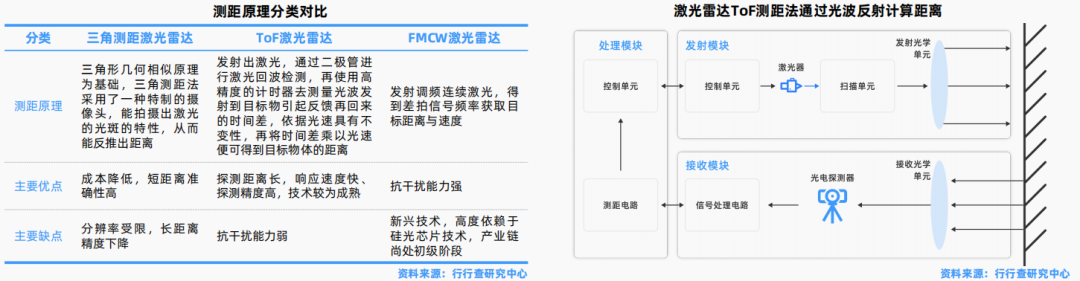
按照測距原理可將激光雷達細分為三角測距、飛行時間測距ToF和調頻連續波FMCW。三角測距法 原理為發射激光到被測物體之后,部分散射光經接收透鏡匯聚到線陣圖像傳感器(CCD/CMOS)上成像,之后根據三角形幾何相似關系原理計算目標物距離。飛行時間法ToF 測距原理為記錄發射器發射激光與探測器接收到回波信號的時間差除以2,直接計算目標物與傳感器之間距離。調頻連續波FMCW 原理為發射調頻連續激光,通過回波信號的延時獲得差拍信號頻率進而獲得飛行時間,通過距離公式反推目標距離并通過多普勒頻率公式測算目標物速度。
ToF測距式激光雷達以激光作為信號源,由激光器發射出的脈沖激光打到周圍物體上引起散射,通過接收器接收光波反射時間進行測距,具有測量速度快,抗強光干擾能力突出的優勢,但存在信噪比低、安全性較低等問題;FMCW激光雷達以調頻波為基礎,可以根據波的頻率計算目標物體的速度,相對于ToF天生增加了速度信息,達到4D感知的效果,當前仍處于探索階段。
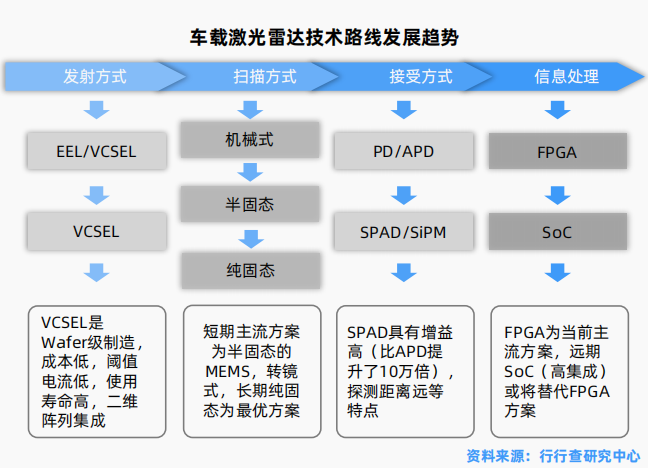
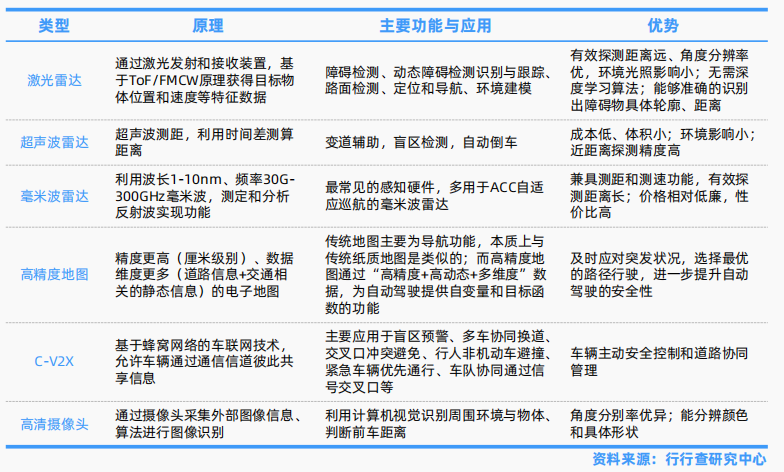
激光雷達位于智能駕駛的感知層,不同傳感方式的原理和功能各不相同,在車載領域各有優劣。目前主要的感知方式包括 激光雷達、超聲波雷達、毫米波雷達、高精度地圖、C-V2X、攝像頭 等。激光雷達作為新一代的傳感器,在探測障礙物的精度和距離方面有著顯著的優勢。車載激光雷達按照激光 發射方式,分為EEL、VCSEL;按照 掃描方式,分為機械式(機械旋轉)、半固態(MEMS、轉鏡、棱鏡)、純固態(OPA、FLASH);按照激光接收方式,分為PD/APD、SPAD/SiPM;按照 信息處理方式,分為FPGA、SoC。
審核編輯 :李倩
-
汽車傳感器
+關注
關注
3文章
192瀏覽量
20738 -
激光雷達
+關注
關注
968文章
3967瀏覽量
189828 -
毫米波雷達
+關注
關注
107文章
1043瀏覽量
64348
原文標題:一文了解汽車傳感器分類
文章出處:【微信號:芯世相新能源,微信公眾號:芯世相新能源】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
氣壓傳感器的分類與應用
沃爾沃汽車榮獲2024中國汽車金扳手獎“充電服務體驗獎”
DEKRA德凱亮相2024年中國汽車流通行業年會
激光傳感器的分類及應用領域
無源傳感器的基本概念、工作原理及分類
位移傳感器:原理、分類、應用與未來趨勢
中國汽車行業破浪前行:出口量激增,全球競爭力顯著提升
傳感器的基本概念、工作原理及輸出類型

傳感器的定義和分類
630億元!畢馬威首次發布中國汽車傳感器產業報告!
傳感器分類及20種常見傳感器
突破萬億!傳感器廠商競逐汽車電子市場
什么是位置傳感器?它有哪些分類?
主流 汽車傳感器作用及分類






 工商網監
工商網監
評論