 GD32F310定時器采樣MP6050并在彩色LCD上顯示波形
GD32F310定時器采樣MP6050并在彩色LCD上顯示波形
1.開發環境
(1)IAR8.4
(2)MPU6050 1.8寸顯示屏
2.軟件
(1)MPU6050陀螺儀驅動
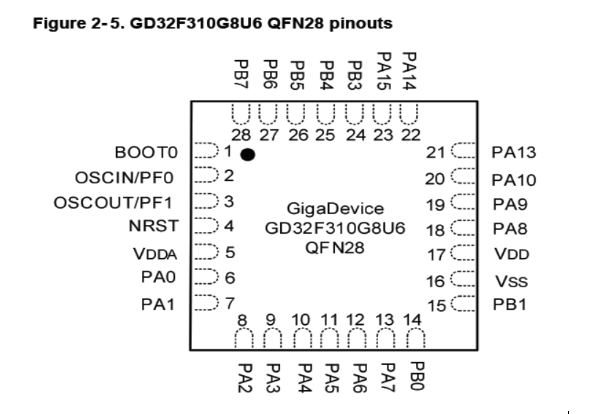
i2C配置:
void i2c0_gpio_config(void)
{
rcu_periph_clock_enable(RCU_GPIOB); rcu_periph_clock_enable(RCU_I2C0); gpio_af_set(GPIOB, GPIO_AF_1, GPIO_PIN_6); gpio_af_set(GPIOB, GPIO_AF_1, GPIO_PIN_7); gpio_mode_set(GPIOB, GPIO_MODE_AF, GPIO_PUPD_PULLUP, GPIO_PIN_6); gpio_output_options_set(GPIOB, GPIO_OTYPE_OD, GPIO_OSPEED_50MHZ, GPIO_PIN_6); gpio_mode_set(GPIOB, GPIO_MODE_AF, GPIO_PUPD_PULLUP, GPIO_PIN_7); gpio_output_options_set(GPIOB, GPIO_OTYPE_OD, GPIO_OSPEED_50MHZ, GPIO_PIN_7);
}
void i2c_config(void)
{
i2c_clock_config(I2C0, 200000, I2C_DTCY_2); i2c_mode_addr_config(I2C0, I2C_I2CMODE_ENABLE, I2C_ADDFORMAT_7BITS, SlaveAddress); i2c_enable(I2C0); i2c_ack_config(I2C0, I2C_ACK_ENABLE);
}
uint8_t Read_Byte(uint16_t SlaveAddr,uint16_t ReadAddr, uint8_t *DataByte)
{
uint8_t err = 1; i2c_start_on_bus(I2C0); while(!i2c_flag_get(I2C0, I2C_FLAG_SBSEND)); i2c_master_addressing(I2C0, SlaveAddr<<1, I2C_TRANSMITTER); while(!i2c_flag_get(I2C0, I2C_FLAG_ADDSEND)); i2c_flag_clear(I2C0, I2C_FLAG_ADDSEND); while(!i2c_flag_get(I2C0, I2C_FLAG_TBE)); i2c_data_transmit(I2C0, ReadAddr); while(!i2c_flag_get(I2C0, I2C_FLAG_TBE)); i2c_start_on_bus(I2C0); while(!i2c_flag_get(I2C0, I2C_FLAG_SBSEND)); i2c_master_addressing(I2C0, SlaveAddr<<1, I2C_RECEIVER); while(!i2c_flag_get(I2C0, I2C_FLAG_ADDSEND)); i2c_ack_config(I2C0, I2C_ACK_DISABLE); i2c_flag_clear(I2C0, I2C_FLAG_ADDSEND); i2c_stop_on_bus(I2C0); while(!i2c_flag_get(I2C0, I2C_FLAG_RBNE)); *DataByte = i2c_data_receive(I2C0); i2c_ack_config(I2C0, I2C_ACK_ENABLE); err = 0; return err;
}
uint8_t Write_Byte(uint16_t SlaveAddr,uint16_t WriteAddr,uint16_t WriteByte)
{
uint8_t err = 0; i2c_start_on_bus(I2C0); while(!i2c_flag_get(I2C0, I2C_FLAG_SBSEND)); i2c_master_addressing(I2C0, SlaveAddr<<1, I2C_TRANSMITTER); while(!i2c_flag_get(I2C0, I2C_FLAG_ADDSEND)); i2c_flag_clear(I2C0, I2C_FLAG_ADDSEND); while(!i2c_flag_get(I2C0, I2C_FLAG_TBE)); i2c_data_transmit(I2C0, WriteAddr); while(!i2c_flag_get(I2C0, I2C_FLAG_TBE)); i2c_data_transmit(I2C0, WriteByte); while(!i2c_flag_get(I2C0, I2C_FLAG_TBE)); i2c_stop_on_bus(I2C0); return err;
}
陀螺儀初始化:
void mpu6050_init(){
Write_Byte( SlaveAddress, PWR_MGMT_1, 0x00 ); delay_1ms(10); Write_Byte( SlaveAddress, SMPLRT_DIV, 0x07 ); delay_1ms(10); Write_Byte( SlaveAddress, CONFIG, 0x06 ); delay_1ms(10); Write_Byte( SlaveAddress, GYRO_CONFIG, 0x18); delay_1ms(10); Write_Byte( SlaveAddress, ACCEL_CONFIG, 0x01); delay_1ms(10);
}
void GetData(uint16_t SlaveAddr,uint16_t REG_Address,short data[3])
{
uint8_t H=0,L=0;
for(int i=0;i<3;i++){
Read_Byte(SlaveAddress, REG_Address+(i*2), &H);
Read_Byte( SlaveAddress, REG_Address+(i*2+1),&L);
data[i]=(( short)(H<<8))|L;
}
(2)LCD驅動
驅動:
void LCD_GPIO_Init(void)
{
rcu_periph_clock_enable(RCU_GPIOA);
gpio_mode_set(GPIOA, GPIO_MODE_OUTPUT, GPIO_PUPD_NONE, GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3|GPIO_PIN_4|GPIO_PIN_5);
gpio_output_options_set(GPIOA, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3|GPIO_PIN_4|GPIO_PIN_5);
gpio_bit_set(GPIOA,GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3|GPIO_PIN_4|GPIO_PIN_5);
}
void LCD_Writ_Bus(uint8_t dat)
{
uint8_t i;
LCD_CS_Clr();
for(i=0;i<8;i++)
{
LCD_SCLK_Clr();
if(dat&0x80)
{
LCD_MOSI_Set();
}
else
{
LCD_MOSI_Clr();
}
LCD_SCLK_Set();
dat<<=1;
}
LCD_CS_Set();
}
void LCD_WR_DATA8(uint8_t dat)
{
LCD_Writ_Bus(dat);
}
void LCD_WR_DATA(uint16_t dat)
{
LCD_Writ_Bus(dat>>8); LCD_Writ_Bus(dat);
}
void LCD_WR_REG(uint8_t dat)
{
LCD_DC_Clr();//д???? LCD_Writ_Bus(dat); LCD_DC_Set();//д????
}
void LCD_Address_Set(uint16_t x1,uint16_t y1,uint16_t x2,uint16_t y2)
{
if(USE_HORIZONTAL==0)
{
LCD_WR_REG(0x2a);//?е??????
LCD_WR_DATA(x1+2);
LCD_WR_DATA(x2+2);
LCD_WR_REG(0x2b);//?е??????
LCD_WR_DATA(y1+1);
LCD_WR_DATA(y2+1);
LCD_WR_REG(0x2c);//??????д
}
else if(USE_HORIZONTAL==1)
{
LCD_WR_REG(0x2a);//?е??????
LCD_WR_DATA(x1+2);
LCD_WR_DATA(x2+2);
LCD_WR_REG(0x2b);//?е??????
LCD_WR_DATA(y1+1);
LCD_WR_DATA(y2+1);
LCD_WR_REG(0x2c);//??????д
}
else if(USE_HORIZONTAL==2)
{
LCD_WR_REG(0x2a);//?е??????
LCD_WR_DATA(x1+1);
LCD_WR_DATA(x2+1);
LCD_WR_REG(0x2b);//?е??????
LCD_WR_DATA(y1+2);
LCD_WR_DATA(y2+2);
LCD_WR_REG(0x2c);//??????д
}
else
{
LCD_WR_REG(0x2a);//?е??????
LCD_WR_DATA(x1+1);
LCD_WR_DATA(x2+1);
LCD_WR_REG(0x2b);//?е??????
LCD_WR_DATA(y1+2);
LCD_WR_DATA(y2+2);
LCD_WR_REG(0x2c);//??????д
}
}
void LCD_Init(void)
{
LCD_GPIO_Init();
LCD_RES_Clr();
delay_1ms(100);
LCD_RES_Set();
delay_1ms(100);
LCD_BLK_Set();
delay_1ms(100);
delay_1ms(120);
LCD_WR_REG(0xB1);
LCD_WR_DATA8(0x05);
LCD_WR_DATA8(0x3C);
LCD_WR_DATA8(0x3C);
LCD_WR_REG(0xB2);
LCD_WR_DATA8(0x05);
LCD_WR_DATA8(0x3C);
LCD_WR_DATA8(0x3C);
LCD_WR_REG(0xB3);
LCD_WR_DATA8(0x05);
LCD_WR_DATA8(0x3C);
LCD_WR_DATA8(0x3C);
LCD_WR_DATA8(0x05);
LCD_WR_DATA8(0x3C);
LCD_WR_DATA8(0x3C);
LCD_WR_REG(0xB4); //Dot inversion
LCD_WR_DATA8(0x03);
LCD_WR_REG(0xC0);
LCD_WR_DATA8(0x28);
LCD_WR_DATA8(0x08);
LCD_WR_DATA8(0x04);
LCD_WR_REG(0xC1);
LCD_WR_DATA8(0XC0);
LCD_WR_REG(0xC2);
LCD_WR_DATA8(0x0D);
LCD_WR_DATA8(0x00);
LCD_WR_REG(0xC3);
LCD_WR_DATA8(0x8D);
LCD_WR_DATA8(0x2A);
LCD_WR_REG(0xC4);
LCD_WR_DATA8(0x8D);
LCD_WR_DATA8(0xEE);
LCD_WR_REG(0xC5); //VCOM
LCD_WR_DATA8(0x1A);
LCD_WR_REG(0x36); //MX, MY, RGB mode
if(USE_HORIZONTAL==0)LCD_WR_DATA8(0x00);
else if(USE_HORIZONTAL==1)LCD_WR_DATA8(0xC0);
else if(USE_HORIZONTAL==2)LCD_WR_DATA8(0x70);
else LCD_WR_DATA8(0xA0);
LCD_WR_REG(0xE0);
LCD_WR_DATA8(0x04);
LCD_WR_DATA8(0x22);
LCD_WR_DATA8(0x07);
LCD_WR_DATA8(0x0A);
LCD_WR_DATA8(0x2E);
LCD_WR_DATA8(0x30);
LCD_WR_DATA8(0x25);
LCD_WR_DATA8(0x2A);
LCD_WR_DATA8(0x28);
LCD_WR_DATA8(0x26);
LCD_WR_DATA8(0x2E);
LCD_WR_DATA8(0x3A);
LCD_WR_DATA8(0x00);
LCD_WR_DATA8(0x01);
LCD_WR_DATA8(0x03);
LCD_WR_DATA8(0x13);
LCD_WR_REG(0xE1);
LCD_WR_DATA8(0x04);
LCD_WR_DATA8(0x16);
LCD_WR_DATA8(0x06);
LCD_WR_DATA8(0x0D);
LCD_WR_DATA8(0x2D);
LCD_WR_DATA8(0x26);
LCD_WR_DATA8(0x23);
LCD_WR_DATA8(0x27);
LCD_WR_DATA8(0x27);
LCD_WR_DATA8(0x25);
LCD_WR_DATA8(0x2D);
LCD_WR_DATA8(0x3B);
LCD_WR_DATA8(0x00);
LCD_WR_DATA8(0x01);
LCD_WR_DATA8(0x04);
LCD_WR_DATA8(0x13);
//------------------------------------End ST7735S Gamma Sequence-----------------------------//
LCD_WR_REG(0x3A); //65k mode
LCD_WR_DATA8(0x05);
LCD_WR_REG(0x29); //Display on
}
顯示函數:
void LCD_Fill(uint16_t xsta,uint16_t ysta,uint16_t xend,uint16_t yend,uint16_t color)
{
uint16_t i,j; LCD_Address_Set(xsta,ysta,xend-1,yend-1);//?????????Χ for(i=ysta;i
}
void LCD_DrawPoint(uint16_t x,uint16_t y,uint16_t color)
{
LCD_Address_Set(x,y,x,y);//???ù??λ?? LCD_WR_DATA(color);
}
void LCD_DrawLine(uint16_t x1,uint16_t y1,uint16_t x2,uint16_t y2,uint16_t color)
{
uint16_t t;
int xerr=0,yerr=0,delta_x,delta_y,distance;
int incx,incy,uRow,uCol;
delta_x=x2-x1; //????????????
delta_y=y2-y1;
uRow=x1;//???????????
uCol=y1;
if(delta_x>0)incx=1; //???????????
else if (delta_x==0)incx=0;//?????
else {incx=-1;delta_x=-delta_x;}
if(delta_y>0)incy=1;
else if (delta_y==0)incy=0;//????
else {incy=-1;delta_y=-delta_y;}
if(delta_x>delta_y)distance=delta_x; //????????????????
else distance=delta_y;
for(t=0;tdistance)
{
xerr-=distance;
uRow+=incx;
}
if(yerr>distance)
{
yerr-=distance;
uCol+=incy;
}
}
}
void LCD_DrawRectangle(uint16_t x1, uint16_t y1, uint16_t x2, uint16_t y2,uint16_t color)
{
LCD_DrawLine(x1,y1,x2,y1,color); LCD_DrawLine(x1,y1,x1,y2,color); LCD_DrawLine(x1,y2,x2,y2,color); LCD_DrawLine(x2,y1,x2,y2,color);
}
void Draw_Circle(uint16_t x0,uint16_t y0,uint8_t r,uint16_t color)
{
int a,b;
a=0;b=r;
while(a<=b)
{
LCD_DrawPoint(x0-b,y0-a,color);
LCD_DrawPoint(x0+b,y0-a,color);
LCD_DrawPoint(x0-a,y0+b,color);
LCD_DrawPoint(x0-a,y0-b,color);
LCD_DrawPoint(x0+b,y0+a,color);
LCD_DrawPoint(x0+a,y0-b,color);
LCD_DrawPoint(x0+a,y0+b,color);
LCD_DrawPoint(x0-b,y0+a,color);
a++;
if((a*a+b*b)>(r*r))
{
b--;
}
}
}
void LCD_ShowChar(uint16_t x,uint16_t y,uint8_t num,uint16_t fc,uint16_t bc,uint8_t sizey,uint8_t mode)
{
uint8_t temp,sizex,t,m=0; uint16_t i,TypefaceNum; uint16_t x0=x; sizex=sizey/2; TypefaceNum=(sizex/8+((sizex%8)?1:0))*sizey; num=num-' '; LCD_Address_Set(x,y,x+sizex-1,y+sizey-1); for(i=0;i
}
void LCD_ShowString(uint16_t x,uint16_t y,const uint8_t *p,uint16_t fc,uint16_t bc,uint8_t sizey,uint8_t mode)
{
while(*p!='?')
{
LCD_ShowChar(x,y,*p,fc,bc,sizey,mode);
x+=sizey/2;
p++;
}
}
uint32_t mypow(uint8_t m,uint8_t n)
{
uint32_t result=1; while(n--)result*=m; return result;
}
void LCD_ShowIntNum(uint16_t x,uint16_t y,uint16_t num,uint8_t len,uint16_t fc,uint16_t bc,uint8_t sizey)
{
uint8_t t,temp; uint8_t enshow=0; uint8_t sizex=sizey/2; for(t=0;t
}
void LCD_ShowFloatNum1(uint16_t x,uint16_t y,float num,uint8_t len,uint16_t fc,uint16_t bc,uint8_t sizey)
{
uint8_t t,temp,sizex; uint16_t num1; sizex=sizey/2; num1=num*100; for(t=0;t
}
(3)主函數
void gd_led_config(void);
void gd_led_toggle(void);
int data[128]={0},data2[128]={0},data3[128]={0};
short Acc[3],Gyro[3];
void TIMER2_IRQHandler(void) {
if(SET == timer_interrupt_flag_get(TIMER2, TIMER_INT_FLAG_UP)){
/* clear channel 0 interrupt bit */
timer_interrupt_flag_clear(TIMER2, TIMER_INT_FLAG_UP);
GetData(SlaveAddress,ACCEL_XOUT_H,Acc);
GetData(SlaveAddress,GYRO_XOUT_H,Gyro);
gd_led_toggle();
}
}
void nvic_config(void)
{
nvic_irq_enable(TIMER2_IRQn, 0, 0);
}
void timer_config(void)
{
TIMER2 Configuration: TIMER2CLK = SystemCoreClock/8400(GD32F330)or 10800(GD32F350) = 10KHz. the period is 1s(10000/10000 = 1s). timer_oc_parameter_struct timer_ocinitpara; timer_parameter_struct timer_initpara; /* enable the peripherals clock */ rcu_periph_clock_enable(RCU_TIMER2); /* deinit a TIMER */ timer_deinit(TIMER2); /* initialize TIMER init parameter struct */ timer_struct_para_init(&timer_initpara); /* TIMER2 configuration */ timer_initpara.prescaler = 4999; timer_initpara.alignedmode = TIMER_COUNTER_EDGE; timer_initpara.counterdirection = TIMER_COUNTER_UP; timer_initpara.period = 999; timer_initpara.clockdivision = TIMER_CKDIV_DIV1; timer_init(TIMER2, &timer_initpara); /* clear channel 0 interrupt bit */ timer_interrupt_flag_clear(TIMER2, TIMER_INT_FLAG_UP); /* enable the TIMER interrupt */ timer_interrupt_enable(TIMER2, TIMER_INT_UP); /* enable a TIMER */ timer_enable(TIMER2);
}
int main(void)
{
gd_led_config(); systick_config(); i2c0_gpio_config();
i2c_config();
mpu6050_init();
LCD_Init();
LCD_Fill(0,0,LCD_W,LCD_H,BLACK);
//LCD_ShowString(0,0,"Hellow GD32F310G8!",WHITE,BLUE,12,0);
timer_config();
/* configure the TIMER2 interrupt */
nvic_config();
while(1) {
for(int i=0;i<128;i++){
LCD_DrawPoint( i, data[i],RED);
LCD_DrawPoint( i, data2[i],GREEN);
LCD_DrawPoint( i, data3[i],BLUE);
}
delay_1ms(10);
for(int i=0;i<128;i++){
LCD_DrawPoint( i, data[i],BLACK);
LCD_DrawPoint( i, data2[i],BLACK);
LCD_DrawPoint( i, data3[i],BLACK);
}
for(int i=0;i<127;i++){
data[i]=data[i+1];
data2[i]=data2[i+1];
data3[i]=data3[i+1];
}
data[127]=20+(int)(((float)Gyro[0])/164);
data2[127]=60+(int)(((float)Gyro[1])/164);
data3[127]=100+(int)(((float)Gyro[2])/164);
//char cpd[10];
//sprintf(cpd,"%d",Acc[0]);
//LCD_ShowString(0,0,cpd,WHITE,BLUE,12,0);
}
}
void gd_led_config(void)
{
rcu_periph_clock_enable(RCU_GPIOA); gpio_mode_set(GPIOA, GPIO_MODE_OUTPUT, GPIO_PUPD_NONE, GPIO_PIN_1); gpio_output_options_set(GPIOA, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_1); GPIO_BC(GPIOA) = GPIO_PIN_1;
}
void gd_led_toggle(void)
{
GPIO_TG(GPIOA) = GPIO_PIN_1;
}
3.效果
GD32存在一個問題,用隊列緩沖陀螺儀數據時,運行數秒后死機。
審核編輯:劉清
-
陀螺儀
+關注
關注
44文章
783瀏覽量
98667 -
LCD顯示器
+關注
關注
0文章
87瀏覽量
20173 -
GD32
+關注
關注
7文章
403瀏覽量
24328
發布評論請先 登錄
相關推薦
GD32F310開發板試用--基于RTT Nano的RTT軟件包使用
在GD32F310開發板實現四線OLED顯示的設計
基于GD32F310 定時器中編碼器接口的簡介及特點
基于GD32F310開發板完成超頻及ADC極限采樣率實驗
在GD32F310上對浮點DSP運算及Modbus移植進行測評
基于GD32F310開發板的CMSIS-DAP燒錄與定時器采集脈寬問題
基于GD32F310開發板的AD多通道交流采樣計算
基于GD32F310開發板的RT-Thread Shell移植及調試心得
基于GD32F310開發板移植FreeRTOS的步驟詳解
GD電機驅動底層配置—永磁同步電機控制
基于GD32F310開發板在rt-thread上添加finsh及其shell功能
利用GD32F310的I2C0實現對HDC1080的初始化及讀取環境溫濕度
在GD32F310開發板上移植FreeRTOS的步驟相關資料分享
GD32F310定時器采樣MP6050并在彩色LCD上顯示波形的操作過程
如何利用GD32F310讀取HDC1080環境溫濕度





 工商網監
工商網監
評論