 離心泵工況診斷系統的整體嵌入式架構設計
離心泵工況診斷系統的整體嵌入式架構設計
其中系統信息交互模塊實現了系統診斷信息的實時傳輸與共享,包括屏顯模塊、云端通信模塊兩部分。通過信息交互模塊,診斷信息被分別發送至了下位機端和移動端APP,操作人員可以根據需要自行選擇是進行現場診斷還是進行遠程診斷。信息交互模塊的功能框架圖如下所示:
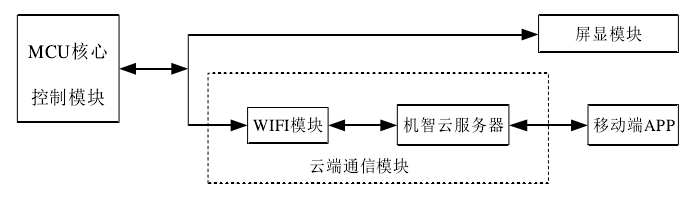
屏顯模塊,負責將診斷信息直接呈現在顯示屏上。基于機智云平臺設計的云端通信模塊,則負責將診斷信息通過機智云服務器發送至操作人員的移動 APP 上。云端通信模塊的功能框架如下所示:
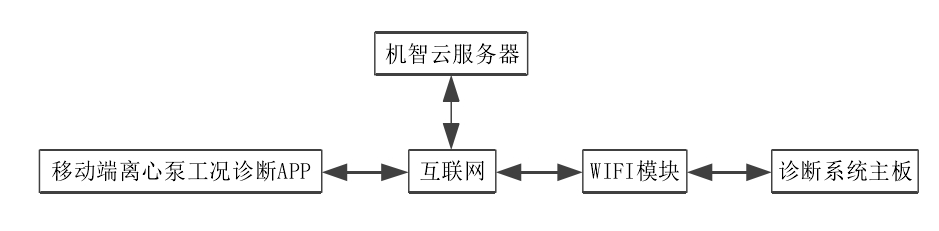
WiFi模塊對系統計算所得的診斷信息進行封裝后傳至互聯網,并通過互聯網上傳至機智云服務器,移動端離心泵工況診斷 APP 通過與機智云服務器通信實時獲取離心泵的工況診斷信息。
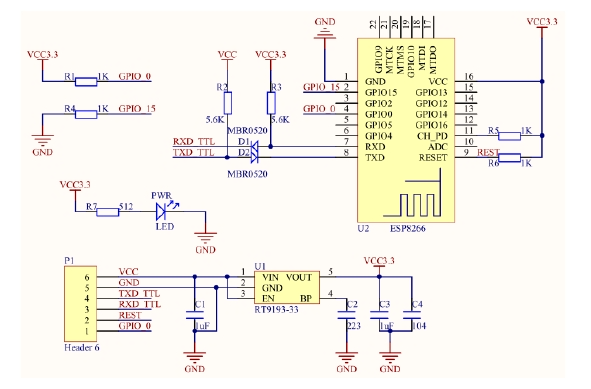
云端通信模塊中的WiFi模塊負責系統的配置入網。WiFi模塊的性能對通信質量起著重要的影響作用。綜合考慮傳輸速率、距離、功耗和接受靈敏度這四方面因素,選用樂鑫 ESP8266WiFi 模組作為系統云端通信模塊的WiFi模塊,其原理圖和實物圖分別如下所示。

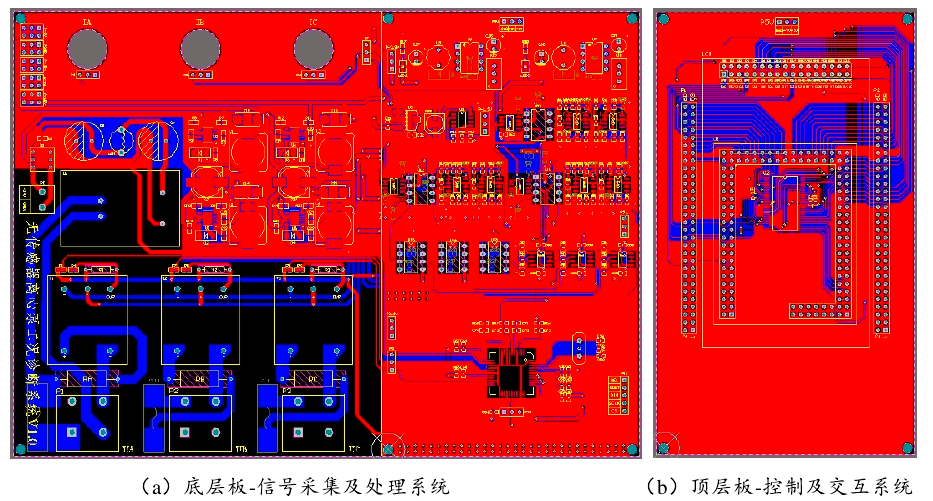
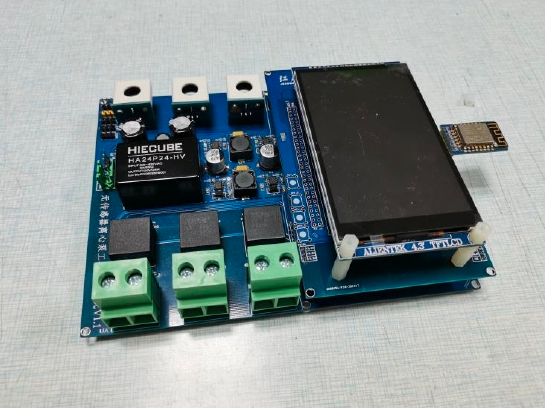
離心泵工況診斷系統樣機的 PCB 設計圖和實物照片分別如下所示。
 03 系統軟件總體設計
在軟件設計上,系統對電流信號的采集通過單片機的 ADC 功能,DMA 功能,通用定時器定時功能實現;系統對電流信號的時頻轉換和對診斷指標的計算通過單片機的 DSP 功能實現;三相電參數監測模塊與 MCU 核心控制模塊之間的信息交互通過單片機的 SPI 通信功能實現;診斷信息的人機交互通過單片機的 FSMC 驅動功能,ESP8266 芯片的 WIFI入網功能以及單片機的串口通信功能實現;系統內存的擴展通過單片機的 FSMC 驅動功能實現;診斷信息的存儲通過單片機的 SDIO 驅動功能實現。
系統初始化在對 MCU 核心控制模塊進行復位操作后,程序將從 main 函數出發,首先執行延時函數初始化,單片機 GPIO 引腳初始化,中斷嵌套初始化,串口初始化操作,然后依照HARDWARE 中的子文件,依次完成對 AD 采集模塊,三相電參數監測模塊,內存擴展模塊,數據存儲模塊,信息交互模塊的初始化操作,最后完成對 FFT 運算相關參數的初始化,系統初始化程序的邏輯實現流程如下:
03 系統軟件總體設計
在軟件設計上,系統對電流信號的采集通過單片機的 ADC 功能,DMA 功能,通用定時器定時功能實現;系統對電流信號的時頻轉換和對診斷指標的計算通過單片機的 DSP 功能實現;三相電參數監測模塊與 MCU 核心控制模塊之間的信息交互通過單片機的 SPI 通信功能實現;診斷信息的人機交互通過單片機的 FSMC 驅動功能,ESP8266 芯片的 WIFI入網功能以及單片機的串口通信功能實現;系統內存的擴展通過單片機的 FSMC 驅動功能實現;診斷信息的存儲通過單片機的 SDIO 驅動功能實現。
系統初始化在對 MCU 核心控制模塊進行復位操作后,程序將從 main 函數出發,首先執行延時函數初始化,單片機 GPIO 引腳初始化,中斷嵌套初始化,串口初始化操作,然后依照HARDWARE 中的子文件,依次完成對 AD 采集模塊,三相電參數監測模塊,內存擴展模塊,數據存儲模塊,信息交互模塊的初始化操作,最后完成對 FFT 運算相關參數的初始化,系統初始化程序的邏輯實現流程如下: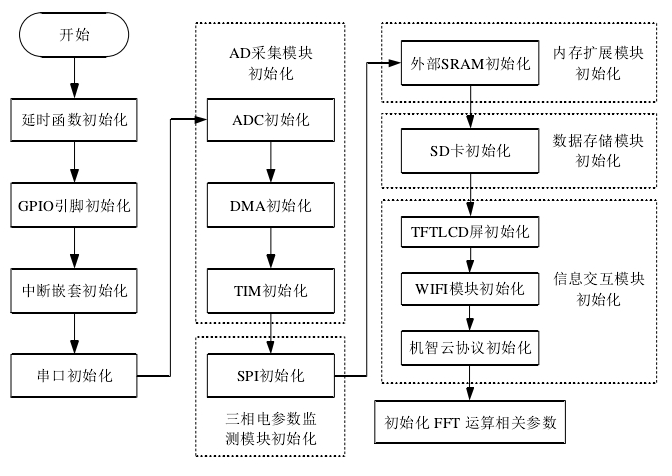 ?信息交互開發
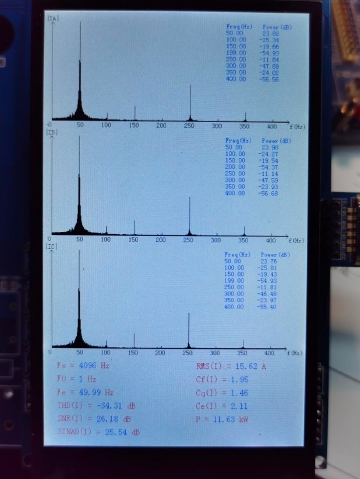
?信息交互開發信息交互程序包括兩方面,一是屏顯模塊的信息顯示程序,二是系統下位機與移動 APP之間的通信程序。屏顯模塊的信息顯示程序較簡單,MCU 核心控制模塊將屏顯模塊視為外部 SRAM 設備,通過 FSMC 對其進行驅動,完成顯示。離心泵工況診斷系統的屏顯界面如下所示:
 ?平臺交互開發系統與移動 APP 之間的遠程通信是基于第三方云端服務器實現的,系統通過 WiFi 模塊接入互聯網后,借助于第三方云端服務器與移動端 APP 之間進行數據傳遞。可以理解為系統在下位機端、云端、移動端三者之間構筑了一個相對完整的物聯網信息交互框架。
?平臺交互開發系統與移動 APP 之間的遠程通信是基于第三方云端服務器實現的,系統通過 WiFi 模塊接入互聯網后,借助于第三方云端服務器與移動端 APP 之間進行數據傳遞。可以理解為系統在下位機端、云端、移動端三者之間構筑了一個相對完整的物聯網信息交互框架。由于機智云平臺可以為用戶提供從設備接入到產品運營管理的整個生命周期的服務。本文選用機智云作為系統云端通信的開發平臺。基于機智云服務器的云端通信框架示意圖如下所示:
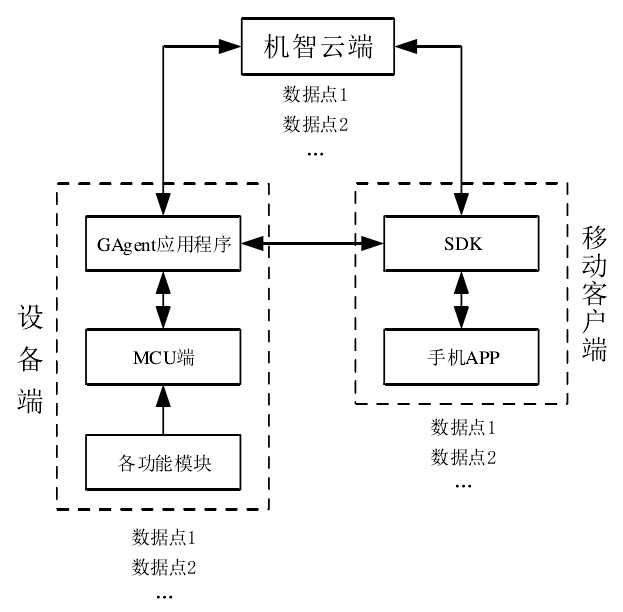 云端通信是在設備端、云端、移動客戶端三者之間進行的。設備端即診斷系統下位機,在軟件上,設備端的云端通信功能要通過 GAgent 應用程序實現。GAgent 是為設備端接入機智云提供的嵌入式固件系統。在離心泵工況診斷系統中,GAgent 在 ATK-ESP8266 WiFi模塊上運行,負責在設備端、云端、移動客戶端三者之間搭建以數據點為媒介的信息交互橋梁。在軟件上,移動客戶端基于 SDK 環境建立了與云端及設備端通信的 API 接口。設備端與云端,移動客戶端與云端之間傳輸的信息被封裝成數據點格式,而 MCU 核心控制模塊在云端通信過程中主要負責數據點與系統實際動作之間的對應轉換。三端協同工作,確保了物聯網中的信息通暢。移動客戶端和設備端之間借助機智云平臺進行通信。
云端通信是在設備端、云端、移動客戶端三者之間進行的。設備端即診斷系統下位機,在軟件上,設備端的云端通信功能要通過 GAgent 應用程序實現。GAgent 是為設備端接入機智云提供的嵌入式固件系統。在離心泵工況診斷系統中,GAgent 在 ATK-ESP8266 WiFi模塊上運行,負責在設備端、云端、移動客戶端三者之間搭建以數據點為媒介的信息交互橋梁。在軟件上,移動客戶端基于 SDK 環境建立了與云端及設備端通信的 API 接口。設備端與云端,移動客戶端與云端之間傳輸的信息被封裝成數據點格式,而 MCU 核心控制模塊在云端通信過程中主要負責數據點與系統實際動作之間的對應轉換。三端協同工作,確保了物聯網中的信息通暢。移動客戶端和設備端之間借助機智云平臺進行通信。云端通信的具體開發步驟如下:
?創建產品:在機智云開發者中心官網中選擇“創建新產品”,并完成產品的屬性配置。具體地,本文在開發過程中,根據診斷系統的應用領域選擇產品分類為“安防,監控”類,將產品名稱命名為“離心泵工況診斷系統 V1”,選擇技術方案類型為 WIFI/移動網絡方案,選擇通訊方式為 WIFI,選擇數據傳輸方式為定長。
?創建數據點:數據點即設備產品功能的抽象。根據系統功能設計要求,分別建立采樣頻率、電網工頻、電機輸入功率、離心泵驅動電機定子電流均方根指標、脈沖因子指標、峭度系數指標、總諧波失真指標、信噪比指標、信納比指標共 9 項只讀數值類型的數據點,用于顯示診斷信息。建立缺相報警這一項布爾值類型的數據點,用于離心泵驅動電機某相斷路時報警。
?協議添加:生成并下載 MCU 開發代碼包。并在項目工程模板中添加 Gizwits 工程協議文檔。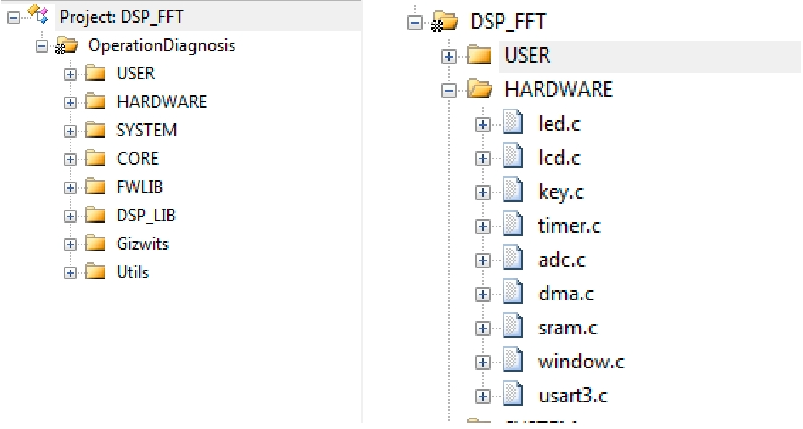
?程序改寫:基于機智云官網生成的 MCU 代碼包,對程序進行改寫,將系統計算出的指標值賦給對應數據點。
?固件燒錄:將 GAgent 固件燒寫進 ATK-ESP8266 WIFI 模塊中。具體燒錄過程見:http://docs.gizwits.com/zh-cn/deviceDev/ESP8266%E4%B8%B2%E5%8F%A3%E7%83%A7%E5%86%99%E8%AF%B4%E6%98%8E.html
?基于 Android Studio 環境,對機智云提供的 APP 開源框架進行個性化修改,最后生成的移動客戶端界面。
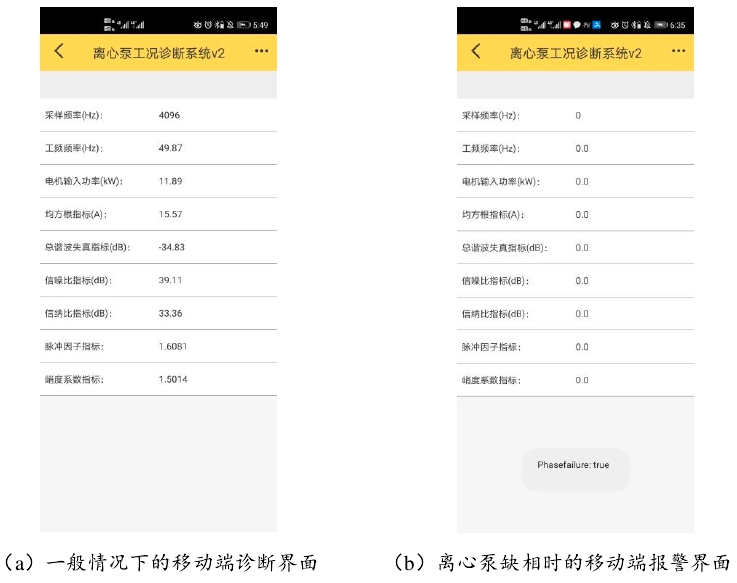
?建立通信:操作 ATK-ESP8266 WIFI 模塊進入 Airlink 模式下配網,綁定設備,進行對接通信測試,完成云端通信的所有配置。系統APP界面圖如下:
 離泵工況診斷的功能實現代碼如下:
離泵工況診斷的功能實現代碼如下:04 系統總結//ADC 參數配置:voidADC_Config(void){GPIO_InitTypeDefGPIO_InitStructure;ADC_CommonInitTypeDefADC_CommonInitStructure;ADC_InitTypeDefADC_InitStructure;RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE);GPIO_InitStructureGPIO_Pin = GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AN;GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;GPIO_Init(GPIOA, &GPIO_InitStructure);RCC_APB2PeriphResetCmd(RCC_APB2Periph_ADC1,ENABLE);RCC_APB2PeriphResetCmd(RCC_APB2Periph_ADC1,DISABLE);ADC_CommonInitStructure.ADC_Mode= ADC_Mode_Independent;ADC_CommonInitStructure.ADC_TwoSamplingDelay = ADC_TwoSamplingDelay_5Cycles;ADC_CommonInitStructure.ADC_DMAAccessMode =ADC_DMAAccessMode_Disabled;ADC_CommonInitStructure.ADC_Prescaler= ADC_Prescaler_Div4;ADC_CommonInit(&ADC_CommonInitStructure);ADC_InitStructure.ADC_Resolution= ADC_Resolution_12b;ADC_InitStructure.ADC_ScanConvMode= ENABLE;ADC_InitStructure.ADC_ContinuousConvMode= DISABLE;ADC_InitStructure.ADC_ExternalTrigConvEdge = ADC_ExternalTrigConvEdge_Rising;ADC_InitStructure.ADC_ExternalTrigConv= ADC_ExternalTrigConv_T2_TRGO;ADC_InitStructure.ADC_DataAlign= ADC_DataAlign_Right;ADC_InitStructure.ADC_NbrOfConversion= 3;ADC_Init(ADC1, &ADC_InitStructure);ADC_RegularChannelConfig(ADC1, ADC_Channel_1, 1, ADC_SampleTime_480Cycles);ADC_RegularChannelConfig(ADC1, ADC_Channel_2, 2, ADC_SampleTime_480Cycles);ADC_RegularChannelConfig(ADC1, ADC_Channel_3, 3, ADC_SampleTime_480Cycles);ADC_DMARequestAfterLastTransferCmd(ADC1, ENABLE);ADC_DMACmd(ADC1, ENABLE);ADC_Cmd(ADC1, ENABLE);}(2) 三相電參數監測模塊參數配置:void EMU_init(int Phase,int Wire){Write_Att7022(0xD3,0x0000); //ATT7022E 復位Write_Att7022(0xC3,0x000000); //校表數據寄存器恢復到上電初始值Write_Att7022(0xC9,0x00005A);//使能SPI校表寫操作Write_Att7022(0x01,0xB97E);//模式配置寄存器設置Write_Att7022(0x03,0xF884); //EMU 單元配置Write_Att7022(0x02,0x0100); //ADC 增益配置寄存器配置Write_Att7022(0x31,0x3437); //模擬模塊寄存器使能Write_Att7022(0x6D, 0xFF00); // Vrefgain 補償曲線系數 TCcoffA 設置Write_Att7022(0x6E, 0x0DB8); // Vrefgain 補償曲線系數 TCcoffB 設置Write_Att7022(0x6F, 0xD1DA); // Vrefgain 補償曲線系數 TCcoffC 設置Write_Att7022(0x1E,HFCONST); //HFconst 3200Write_Att7022(0x17,(int)ATT_U_JIAOZHENG(0x0D,228.6)); //A 相電壓增益校準Write_Att7022(0x18,(int)ATT_U_JIAOZHENG(0x0E,228.6)); //B 相電壓增益校準Write_Att7022(0x19,(int)ATT_U_JIAOZHENG(0x0F,229.7)); //C 相電壓增益校準Write_Att7022(0x1A,(int)ATT_I_JIAOZHENG(0x10,1.568)); //A 相電流增益校準Write_Att7022(0x1B,(int)ATT_I_JIAOZHENG(0x11,1.568)); //B 相電流增益校準Write_Att7022(0x1C,(int)ATT_I_JIAOZHENG(0x12,1.568)); //C 相電流增益校準Write_Att7022(0x04,(int)ATT_P_JIAOZHENG(0x01,358.448)); //A 相有功功率增益校準Write_Att7022(0x07,(int)ATT_P_JIAOZHENG(0x01,358.448)); //A 相無功功率增益校準Write_Att7022(0x0A,(int)ATT_P_JIAOZHENG(0x01,358.448)); //A 相視在功率增益校準Write_Att7022(0x05,(int)ATT_P_JIAOZHENG(0x02,358.448)); //B 相有功功率增益校準Write_Att7022(0x08,(int)ATT_P_JIAOZHENG(0x02,358.448)); //B 相無功功率增益校準Write_Att7022(0x0B,(int)ATT_P_JIAOZHENG(0x02,358.448)); //B 相視在功率增益校準Write_Att7022(0x06,(int)ATT_P_JIAOZHENG(0x03,358.448)); //C 相有功功率增益校準Write_Att7022(0x09,(int)ATT_P_JIAOZHENG(0x03,358.448)); //C 相無功功率增益校準Write_Att7022(0x0C,(int)ATT_P_JIAOZHENG(0x03,358.448)); //C 相視在功率增益校準if (Phase==3 && Wire==3){ //SEL 選擇Write_Att7022(0x35,0x080E); //IO 狀態寄存器配置}else if(Phase==3 && Wire==4){Write_Att7022(0x35,0x080F);}Write_Att7022(0xC5,0x0002); //打開同步Write_Att7022(0xC9,0x000000); //關閉 SPI 校表寫操作}(3) main.c 文件相關程序://頻譜繪制,帶寬 430Hzvoid Frequency_Spectrum(float32_t * arry,float32_t x,uint16_t n){uint16_t i;float power;for(i=0;i<430;i++){if(*(arry+i)/x==1){*(arry+i)=1;}POINT_COLOR = BLACK;LCD_DrawLine(15+i,200+208*n,15+i,200+208*n-(*(arry+i))*180);}POINT_COLOR = BLUE;LCD_ShowString(330,20+208*n,120,12,12,"Freq(Hz) Power(dB)");for(i=0;i<8;i++){power=10*log10(RMSharmonic[i]*RMSharmonic[i]);LCD_ShowFloatNum(330,32+208*n+12*i,harmonic_frequency[i],2,12,0);if(power>0){LCD_ShowFloatNum(396,32+208*n+12*i,power,2,12,0);}else{LCD_ShowString(390,32+208*n+12*i,6,12,12,"-");LCD_ShowFloatNum(396,32+208*n+12*i,(-power),2,12,0);}}}//頻域診斷指標計算void Frequency_OperationIndicator(float32_t * arry,uint16_t n){uint16_t i;float32_t current_power;float32_t fundamental_power;float32_t harmonic_power;float32_t sqrt_harmonic_power;for(i=0;i<(FFT_LENGTH/2+1);i++){if(i==0)amplitude[i]=(*(arry+i)/FFT_LENGTH)* 4.39f; //直流分量幅值還原,頻譜修正elseamplitude[i]=(*(arry+i)*2/FFT_LENGTH) *4.39f; //交流分量幅值還原,頻譜修正}arm_max_f32(amplitude,2049,harmonic,harmonic_frequency); //基波基頻RMSharmonic[0]=harmonic[0]/1.4142135623731f;for(i=2;i<11;i++){arm_max_f32((amplitude+i*harmonic_frequency[0]-1),2,harmonic+i-1,harmonic_frequency+i-1); //10 次以內諧波*(harmonic_frequency+i-1)=*(harmonic_frequency+i-1)+i*harmonic_frequency[0]-1;/諧頻RMSharmonic[i-1]=harmonic[i-1]/1.4142135623731f;}current_power=square(RMS[n],2); //信號總功率fundamental_power=square(RMSharmonic[0],2);//基波功率arm_power_f32(RMSharmonic+1,9,&harmonic_power); //諧波功率arm_sqrt_f32(harmonic_power,&sqrt_harmonic_power);THD[n]=sqrt_harmonic_power/RMSharmonic[0]; //總諧波失真指標計算SNR[n]=(fundamental_power+harmonic_power)/(current_power-fundamental_power-harmonic_power);SINAD[n]=current_power/(current_power-fundamental_power);arm_sqrt_f32(SNR[n],SNR+n); //信噪比指標計算arm_sqrt_f32(SINAD[n],SINAD+n); //信納比指標計算THD[n]=20*log10(THD[n]); //dB 換算SNR[n]=20*log10(SNR[n]); //dB 換算SINAD[n]=20*log10(SINAD[n]); //dB 換算Frequency_Spectrum(amplitude,harmonic[0],n);}//時域診斷指標計算void Time_OperationIndicator(float32_t * arry,uint16_t n){uint32_t i;uint32_t imax;float32_t max;float32_t mean; //平均值float32_t meanabs; //整流平均值float32_t meansqrt; //算術平方根的平均值float32_t squaremeansqrt; //方根幅值arm_max_f32(arry,4096,&max,&imax); //峰值計算arm_mean_f32(arry,4096,&mean); //平均值計算arm_abs_f32(arry,arry,4096); //絕對值計算for(i=0;i<4096;i++){KURTOSIS[n]=KURTOSIS[n]+square((*(arry+i)-mean),4);}KURTOSIS[n]=KURTOSIS[n]/4096;KURTOSIS[n]=KURTOSIS[n]/square((*(RMS+n)),4); //峭度系數指標計算arm_mean_f32(arry,4096,&meanabs);for(i=0;i<4096;i++){arm_sqrt_f32(*(arry+i),(arry+i));}arm_mean_f32(arry,4096,&meansqrt);squaremeansqrt=square(meansqrt,2);PULSE[n]=max/meanabs; //脈沖因子指標計算MARGIN[n]=max/squaremeansqrt; //裕度因子指標計算}//Gizwits 協議初始化void Gizwits_Init(void){TIM3_Int_Init(10-1,8400-1); //1MS 系統定時usart3_init(9600);memset((uint8_t*)¤tDataPoint, 0, sizeof(dataPoint_t)); //設備狀態結構體初始化gizwitsInit(); //緩沖區初始化}//機智云用戶自定義函數void userHandle(void){if(wifi_sta) //WIFI 已連接{currentDataPoint.valueFe = Fe;currentDataPoint.valuePin = Pin;currentDataPoint.valueTHD = THD[3];currentDataPoint.valueSNR = SNR[3];currentDataPoint.valueSINAD = SINAD[3];currentDataPoint.valueCf = PULSE[3];currentDataPoint.valueCq = KURTOSIS[3];currentDataPoint.valueCe = MARGIN[3];currentDataPoint.valueFs = Fs;}}//主函數int main(void){uint16_t n;int key;arm_cfft_radix4_instance_f32 scfft;NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //系統中斷優先級分組delay_init(168); //延時函數初始化uart_init(115200); //初始化串口KEY_Init(); //按鍵初始化Gizwits_Init(); //機智云協議初始化TIM2_Int_Init(); //通用定時器 2 初始化ADC_Config(); //ADC 參數配置DMA_Config(); //DMA 參數配置LCD_Init(); //LCD 初始化FSMC_SRAM_Init(); //外部 SRAM 初始化arm_cfft_radix4_init_f32(&scfft,FFT_LENGTH,0,1); //初始化 scfft 結構體,設定 FFT 參數Screen_diaplay(); //界面顯示EMU_init(3,4); //三相電參數監測模塊初始化while (1){if(flag_dma==1){arm_rms_f32(ADC_Con_A[n],4096,RMS+0); //A 相輸入電流均方根指標計算arm_rms_f32(ADC_Con_B[n],4096,RMS+1); //B 相輸入電流均方根指標計算arm_rms_f32(ADC_Con_C[n],4096,RMS+2); //C 相輸入電流均方根指標計算//復數構造for(n=0;nfft_inputbuf[0][2*n]=ADC_Con_A[n]* Kaiser [n];fft_inputbuf[0][2*n+1]=0;fft_inputbuf[1][2*n]=ADC_Con_B[n]*Kaiser[n];fft_inputbuf[1][2*n+1]=0;fft_inputbuf[2][2*n]=ADC_Con_C[n]* Kaiser [n];fft_inputbuf[2][2*n+1]=0;}arm_cfft_radix4_f32(&scfft,fft_inputbuf[0]); //FFT 計算(基 4)arm_cmplx_mag_f32(fft_inputbuf[0],fft_outputbufA,FFT_LENGTH); //復數求模arm_cfft_radix4_f32(&scfft,fft_inputbuf[1]);arm_cmplx_mag_f32(fft_inputbuf[1],fft_outputbufB,FFT_LENGTH);arm_cfft_radix4_f32(&scfft,fft_inputbuf[2]);arm_cmplx_mag_f32(fft_inputbuf[2],fft_outputbufC,FFT_LENGTH);Frequency_OperationIndicator(fft_outputbufA,0); //頻域診斷指標計算Frequency_OperationIndicator(fft_outputbufB,1);Frequency_OperationIndicator(fft_outputbufC,2);Time_OperationIndicator(ADC_Con_A,0); //時域診斷指標計算Time_OperationIndicator(ADC_Con_B,1);Time_OperationIndicator(ADC_Con_C,2);//合相診斷指標計算RMS[3]=(RMS[0]+RMS[1]+RMS[2])/3;PULSE[3]=(PULSE[0]+PULSE[1]+PULSE[2])/3;MARGIN[3]=(MARGIN[0]+MARGIN[1]+MARGIN[2])/3;KURTOSIS[3]=(KURTOSIS[0]+KURTOSIS[1]+KURTOSIS[2])/3;THD[3]=(THD[0]+THD[1]+THD[2])/3;SNR[3]=(SNR[0]+SNR[1]+SNR[2])/3;SINAD[3]=(SINAD[0]+SINAD[1]+SINAD[2])/3;Fe=ReadSARegister(0x1C)/8192; //電網工頻Pin=Calculate_S(HXPhase)*2; //電機輸入功率LCD_ShowFloatNum(65,640,Fs,0,16,0);LCD_ShowFloatNum(65,665,F0,0,16,0);LCD_ShowFloatNum(65,690,Fe,2,16,0);LCD_ShowString(97,715,8,16,16,"-");LCD_ShowFloatNum(105,715,-THD[3],2,16,0);LCD_ShowFloatNum(97,740,SNR[3],2,16,0);LCD_ShowFloatNum(113,765,SINAD[3],2,16,0);LCD_ShowFloatNum(352,640,RMS[3],2,16,0);LCD_ShowFloatNum(344,665,PULSE[3],2,16,0);LCD_ShowFloatNum(344,690,KURTOSIS[3],2,16,0);LCD_ShowFloatNum(344,715,MARGIN[3],2,16,0);LCD_ShowFloatNum(312,740,P,2,16,0);userHandle(); //機智云協議用戶操作gizwitsHandle((dataPoint_t *)¤tDataPoint); //機智云協議處理key = KEY_Scan(0);if(key==KEY1_PRES) //KEY1 按鍵按下{printf("WIFI 進入 Airlink 連接模式 ");gizwitsSetMode(WIFI_AIRLINK_MODE); //Airlink 模式接入}if(key==WKUP_PRES) //KEY_UP 按鍵按下{printf("WIFI 復位,以重新配置連接 ");gizwitsSetMode(WIFI_RESET_MODE); //WIFI 復位}}}}
綜合離心泵工況診斷系統的功能需求和硬件架構,本文從系統初始化、信息交互等方面對系統的功能實現程序進行了設計,基于機智云物聯網云平臺實現了電流信號的實時采集,診斷指標的實時計算,電流頻譜的實時顯示,電機功率的實時監測以及系統下位機與屏顯模塊、移動端 APP 兩個平臺之間的信息交互。
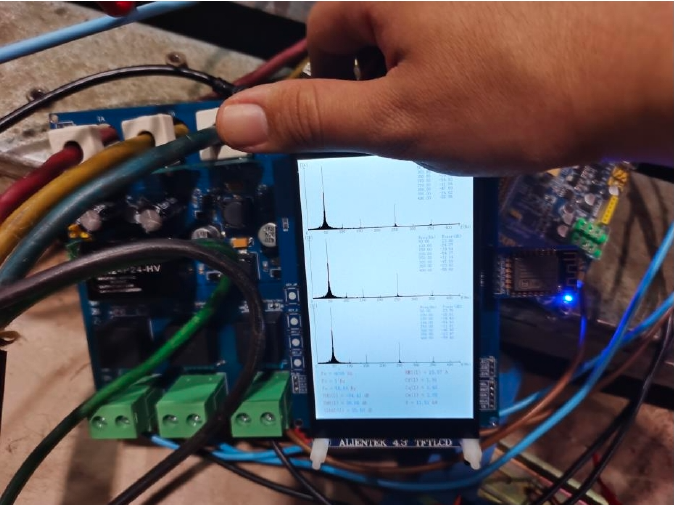
實物工作情況圖如下:
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753077 -
嵌入式
+關注
關注
5082文章
19104瀏覽量
304815 -
驅動電機
+關注
關注
9文章
409瀏覽量
30717 -
離心泵
+關注
關注
0文章
30瀏覽量
3085
原文標題:基于物聯網云平臺的離心泵工況診斷系統
文章出處:【微信號:IoTMaker,微信公眾號:機智云開發者】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論