


MyCobot機(jī)械臂是一款入門級(jí)的六自由度機(jī)械臂,目前是國產(chǎn)機(jī)械臂中價(jià)格和性能十分優(yōu)良的機(jī)械臂,本講主要以MyCobot 280pi機(jī)臂的開箱搭建和開發(fā)前的準(zhǔn)備工作為起點(diǎn)為小伙伴們?cè)敿?xì)的介紹這款機(jī)械臂的搭建,開發(fā),代碼調(diào)試,及進(jìn)階。
MyCobot消費(fèi)級(jí)的機(jī)械臂有四種型號(hào)的機(jī)械臂,M5版本、Pi版本、Arduino版本、JN版本,這里我主要以樹莓派的Cobot作為我們教學(xué)的設(shè)備。
一:開箱
1、標(biāo)準(zhǔn)配置的設(shè)備開箱主要有以下幾個(gè)部件

2、固定機(jī)械臂
這里強(qiáng)烈建議初學(xué)者要定訂固定底座,因?yàn)槟悴豢赡苊看芜\(yùn)行的時(shí)侯都用手扶著,另外就是機(jī)械在運(yùn)動(dòng)的時(shí)候萬一掃到什么東西可能會(huì)給你帶來損失,所以機(jī)械臂的安裝盡量估算好周邊的距離,萬一你程序沒調(diào)好,他碰到東西可能會(huì)造成損失。
機(jī)械臂固定件有好幾種,我這里使用的是G型底座,直接卡在了桌子邊上。
一種是G型號(hào)底座,如圖

一種吸盤,如圖:

3、接線的方法
電源線接到這里

視頻接到這里

網(wǎng)線接到這里

把設(shè)備固定好,接好線我們就可以上電進(jìn)行下一步工作了。
二、上電設(shè)置
開機(jī)后進(jìn)入這個(gè)界面

開發(fā)前的準(zhǔn)備工作,主要是設(shè)置我們的網(wǎng)絡(luò)、ssh、VNC、校準(zhǔn)機(jī)械臂等工作,好的讓我們開始設(shè)置吧!
(1)網(wǎng)絡(luò)設(shè)置
網(wǎng)絡(luò)設(shè)置可以采用兩種試,一是wifi設(shè)置方法很簡單,如圖
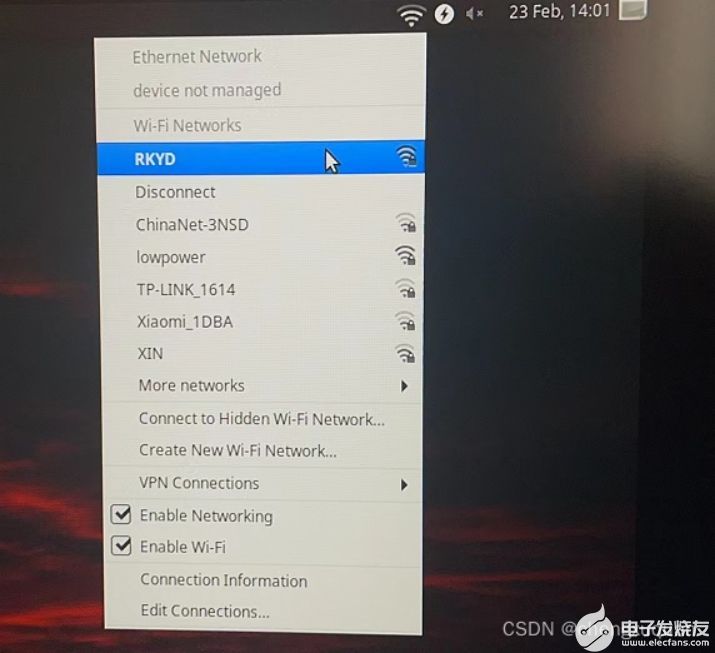
直接點(diǎn)擊右上角的網(wǎng)絡(luò)圖標(biāo),接入你需要接入的wifi即可。
第二種方法是用樹莓派的網(wǎng)卡,我們可以設(shè)置固定的IP,這樣IP就不會(huì)隨便更改,更適合我們的操作。
可以在終端命令行執(zhí)行如下指令:
sudo vim /etc/network/interfaces
注意這款機(jī)械臂使用的ubuntu的版本應(yīng)該是16.04,所以網(wǎng)絡(luò)配置你按16.04版本的網(wǎng)絡(luò)配置來做。
(2)打開ssh服務(wù)
打開一個(gè)終端界面,執(zhí)行:
sudo rasp-config
然后彈出如下界面:
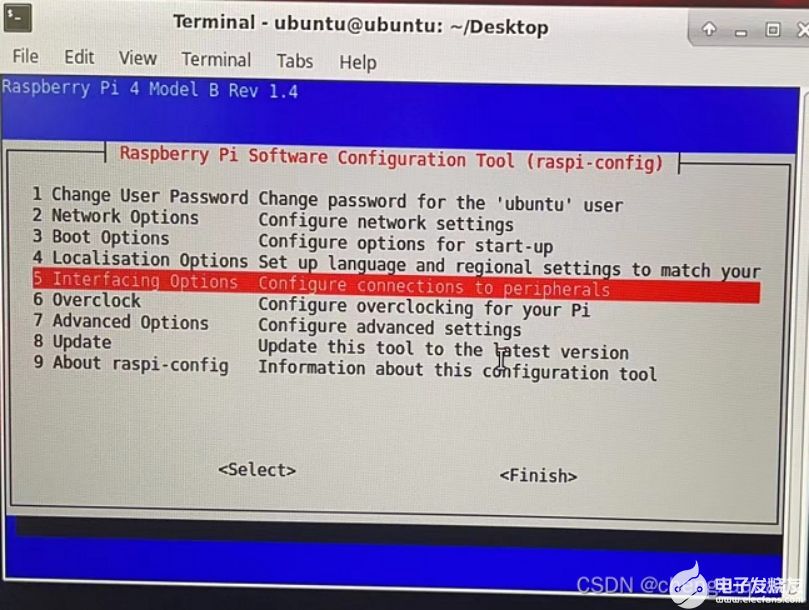
選擇Interfacing Options,進(jìn)入下一個(gè)界面,選P2,SSH,然后啟動(dòng)SSH,如圖
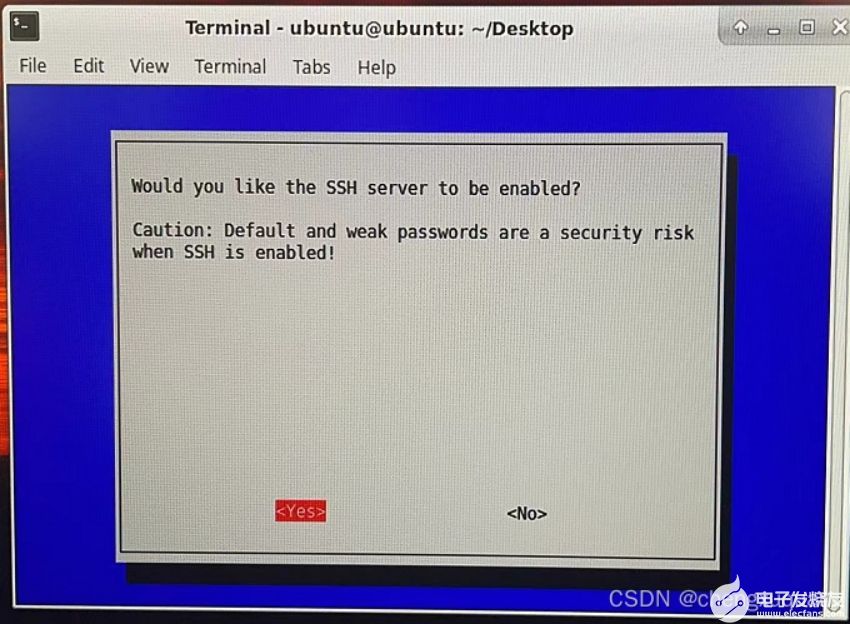
做完后按Finish退出。
安裝vim,本人試過vi編輯器,在此設(shè)備中不算好用,所以這里推薦使用vim,安裝方法是在終端界面執(zhí)行:
sudo apt install vim
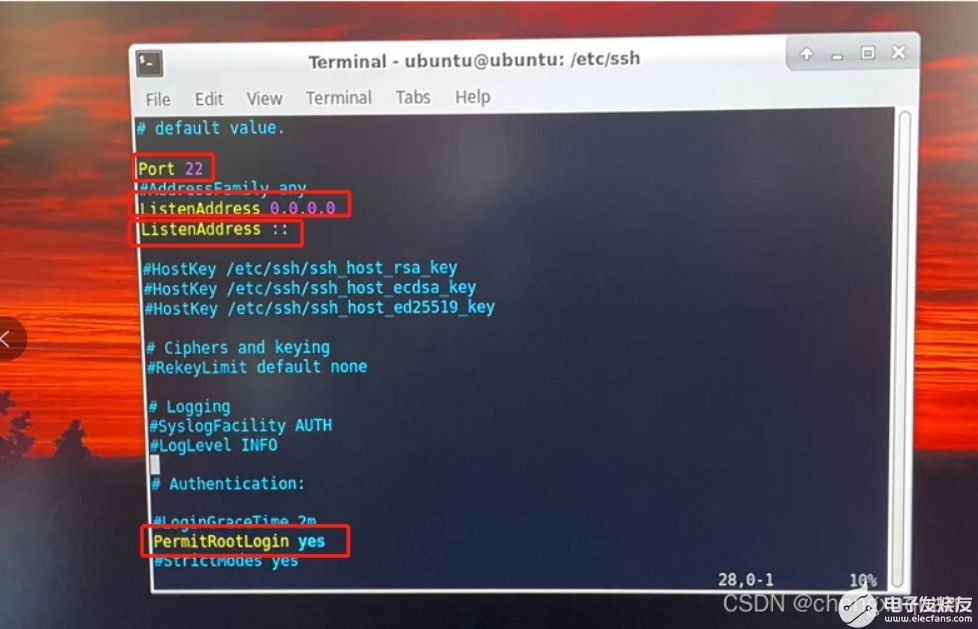
然后我們配置ssh-server
sudo vim /etc/ssh/sshd_config
修改以下幾項(xiàng),并保存退出。
(3)打開VNC
這一步要先設(shè)置好root密碼,執(zhí)行如下指令:
sudo passwd root
為什么要這樣呢,因?yàn)榇蜷_vnc有可能無法再進(jìn)入桌面,這時(shí)我們可以使用root指令,通過ssh進(jìn)行操作。
如何打開vnc呢,當(dāng)然可以通過sudo raspi-config,但我試過不行。這里必須使用指令打開,在終端執(zhí)行:
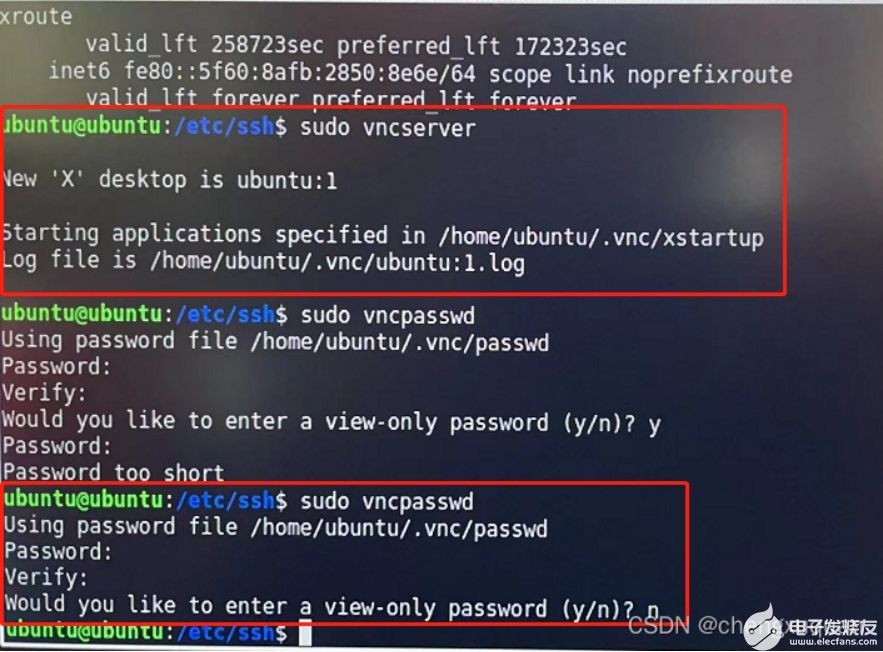
sudo vncserver
查看vnc是否啟動(dòng)
ps -ef |grep vnc
設(shè)置vnc登錄密碼:
sudo vncpasswd
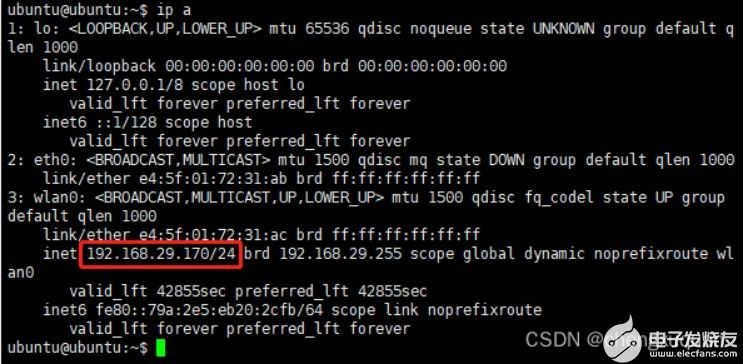
如果你是wifi連接的,重啟前,請(qǐng)終端執(zhí)行:
ip a
然后記住的登錄IP址:
當(dāng)然你也可以重新設(shè)置桌面用戶的密碼:
sudo passwd ubuntu
我這里設(shè)置的密碼同用戶名相同,僅為測試使用。
接下來我們重啟樹莓派。
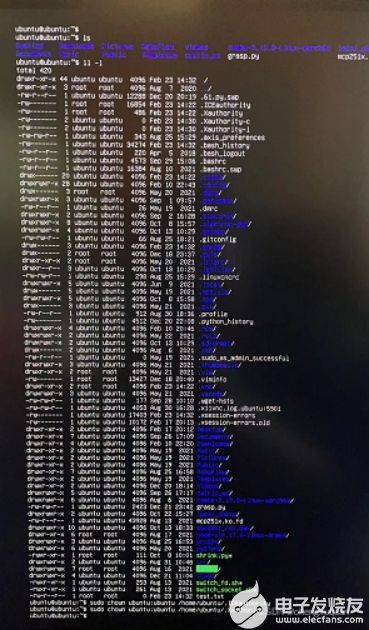
解決問題一:
重啟后,不管用什么用戶名都無法登錄樹莓派了,反復(fù)提示登錄選項(xiàng),這里主要的原因是因?yàn)関nc啟動(dòng)時(shí)文件權(quán)限的問題,我們按CTRL+Alt+F1進(jìn)行命令行,使用ubuntu登錄后,執(zhí)行如下指令:
sudo chown -R ubuntu:ubuntu /home/ubuntu/.ICEauthority
sudo chown -R ubuntu:ubuntu /home/ubuntu/.Xauthority
reboot
重啟后以上問題解決。
機(jī)械臂開發(fā)使用前的準(zhǔn)備工作已做完了,接下來,讓我們開始學(xué)習(xí)下一篇《MyCobot基礎(chǔ)操作》。
審核編輯 黃昊宇
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29761瀏覽量
213094 -
機(jī)械臂
+關(guān)注
關(guān)注
13文章
554瀏覽量
25403 -
協(xié)作機(jī)器人
+關(guān)注
關(guān)注
2文章
515瀏覽量
30618
發(fā)布評(píng)論請(qǐng)先 登錄
想做好PCBA貼片加工?這些前期準(zhǔn)備工作要做好!
極海G32R501工業(yè)六軸機(jī)械臂參考方案釋放工業(yè)4.0產(chǎn)業(yè)價(jià)值

大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開源六軸機(jī)械臂產(chǎn)品


大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開源六軸機(jī)械臂產(chǎn)品
大象機(jī)器人×進(jìn)迭時(shí)空聯(lián)合發(fā)布全球首款RISC-V全棧開源小六軸機(jī)械臂

家里亂成“垃圾場”,樹莓派也能一鍵搞定家務(wù)了?

專為機(jī)器人教育而設(shè)計(jì)的創(chuàng)客友好型機(jī)械臂

如何使用PLC控制myCobot 320機(jī)械臂

使用myCobot 280機(jī)械臂結(jié)合ROS2系統(tǒng)搭建機(jī)械分揀站

焊接機(jī)器人六個(gè)軸分別是什么作用

機(jī)械臂的高效運(yùn)作,連接器起關(guān)鍵作用
配電室停電的準(zhǔn)備工作和步驟
OrangePi AIpro應(yīng)用:機(jī)械臂應(yīng)用開發(fā)指南

開源六軸協(xié)作機(jī)器人myCobot 320結(jié)合人臉表情識(shí)別情緒!






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論