") SIPART PS2型智能電氣閥門定位器的工作方式、調(diào)試及參數(shù)設(shè)置
SIPART PS2型智能電氣閥門定位器的工作方式、調(diào)試及參數(shù)設(shè)置
(1)工作方式
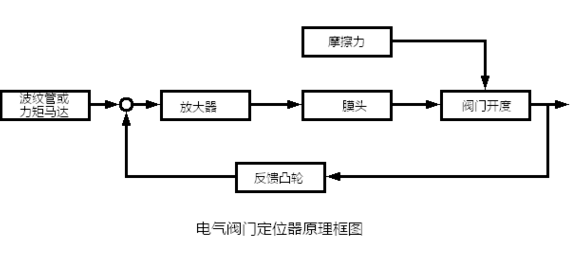
SIPART PS2 型智能電氣閥門定位器的工作原理與傳統(tǒng)定位器完全不同。采用微處理器對(duì)給定值和位置反饋?zhàn)鞅容^。如果微處理器檢測(cè)到偏差,它就用一個(gè)五步開(kāi)關(guān)程序來(lái)控制壓電閥,壓電閥進(jìn)而調(diào)節(jié)進(jìn)入執(zhí)行機(jī)構(gòu)氣室的空氣流量。當(dāng)SIPART PS2 采用二線制連接時(shí),它完全從4 至20mA給定信號(hào)中獲取電源。亦可從PROFIBUS(SIPART PS2 PA)總線信號(hào)中獲取電源。SIPART PS2 定位器采用適當(dāng)?shù)陌惭b組件固定到直行程或角行程執(zhí)行機(jī)構(gòu)上,執(zhí)行機(jī)構(gòu)的直線或轉(zhuǎn)角位移通過(guò)安裝的組件檢測(cè)并由一個(gè)剛性連接的導(dǎo)電塑料電位器轉(zhuǎn)換,裝在直行程執(zhí)行機(jī)構(gòu)上的組件檢測(cè)得到的角度誤差被自動(dòng)地校正.微處理器根據(jù)偏差(給定值W 與位置反饋信號(hào)X)的大小和方向輸出一個(gè)電控指令給壓電閥。壓電閥將控制指令轉(zhuǎn)換為氣動(dòng)位移增量,當(dāng)控制偏差很大時(shí)(高速區(qū))。定位器輸出一個(gè)連續(xù)信號(hào);當(dāng)控制偏差不大(低速區(qū)),定位器輸出脈沖連續(xù);當(dāng)控制器偏差很小時(shí)(自適應(yīng)或可調(diào)死區(qū)狀態(tài)),則沒(méi)有控制指令輸出。
(2)調(diào)試
調(diào)試(初始化)在很大程度上是自動(dòng)進(jìn)行的。在初始化時(shí),微處理器自動(dòng)確定執(zhí)行機(jī)構(gòu)的零點(diǎn),最大行程,作用方向和執(zhí)行機(jī)構(gòu)的定位速度,用這些來(lái)確定最小脈沖時(shí)間和死區(qū),從而使控制達(dá)到最佳。使用SIPART PS2定位器上的按鍵和LCD 可以手動(dòng)操作氣動(dòng)執(zhí)行機(jī)構(gòu)。用于定位器、執(zhí)行機(jī)構(gòu)和調(diào)節(jié)閥的監(jiān)控和診斷功能SIPART PS2(6DR5...)具有檢測(cè)和當(dāng)選擇極值報(bào)警時(shí),能報(bào)告執(zhí)行機(jī)構(gòu)和調(diào)節(jié)閥變化的多項(xiàng)監(jiān)控功能,這種診斷對(duì)調(diào)節(jié)閥和執(zhí)行機(jī)構(gòu)是重要的信息。可實(shí)現(xiàn)測(cè)量值(一些極值可調(diào)整)的確定和監(jiān)控,包括:
? 行程累積
? 行程方向改變次數(shù)
? 報(bào)警計(jì)數(shù)
? 死區(qū)自調(diào)整
? 閥門極限位置(例如:閥座的磨損)
? 最高/最低溫度下的運(yùn)行小時(shí)數(shù)(按照溫度等級(jí))
? 壓電閥運(yùn)行循環(huán)數(shù)
? 閥門定位時(shí)間
? 執(zhí)行機(jī)構(gòu)泄漏
對(duì)于一臺(tái)新的或停電時(shí)間過(guò)長(zhǎng)的智能閥門定位器,需重新設(shè)置參數(shù),并進(jìn)行初始化,使其符合使用要求,否則閥門定位器將無(wú)法正常運(yùn)行。
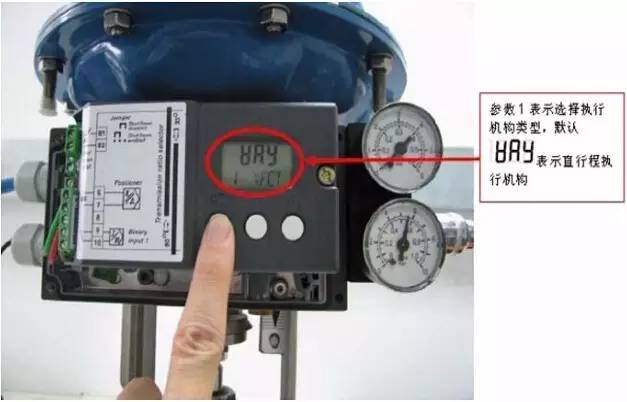
(3)參數(shù)設(shè)置
上電后顯示如下:


這時(shí)可通過(guò)上 和下 鍵移動(dòng)執(zhí)行機(jī)構(gòu)達(dá)到每一個(gè)最終位置,來(lái)檢查機(jī)械裝置是否可在全部調(diào)整范圍內(nèi)自由移動(dòng)。對(duì)于直行程移動(dòng)執(zhí)行器,使桿達(dá)到水平位置,顯示屏將顯示一個(gè)介于P48.0 到P52.0 之間的值。如果不是這種情況,調(diào)整磨擦夾緊單元,直到桿水平并顯示“P50.0”時(shí)。確切的說(shuō),你達(dá)到了這一值,定位器能測(cè)定的位移將更精確。
注:當(dāng)你保持第一方向鍵向下按壓的同時(shí)下壓另一方向鍵時(shí),可快速移動(dòng)執(zhí)行機(jī)構(gòu)。
(4)參數(shù)設(shè)置


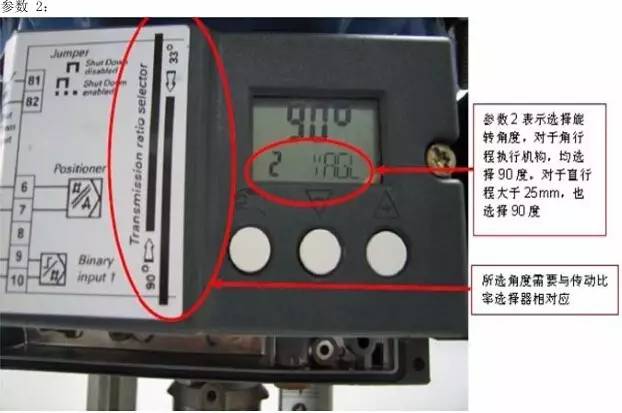








如果你希望在初始化階段完成后,計(jì)算的整個(gè)沖程量用mm 表示,這一步必須設(shè)置。為此,你需要在顯示屏上選擇與刻度桿上驅(qū)動(dòng)釘設(shè)定值相同的值。
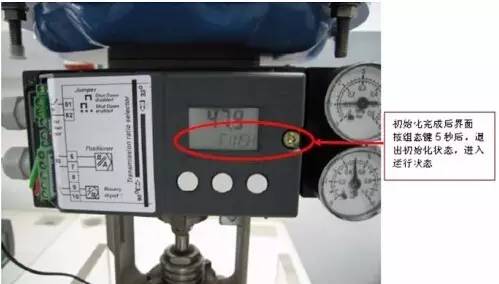
(5)自動(dòng)初始化




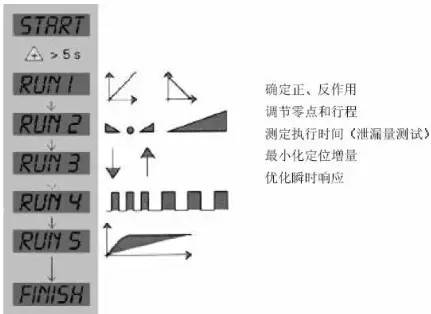
初始化過(guò)程中的五步具體含義,見(jiàn)以上示例。在此期間無(wú)須任何操作。如果在某一步出現(xiàn)故障,則按照第三部分中的方案進(jìn)行處理。
注:初始化過(guò)程依據(jù)執(zhí)行機(jī)構(gòu),可持續(xù)15 分鐘。
(6)手動(dòng)初始化

手動(dòng)初始化第一位置設(shè)定點(diǎn):
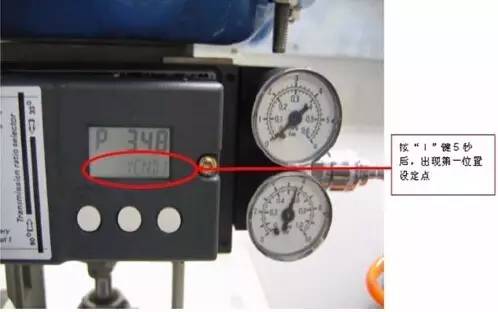

手動(dòng)初始化第二位置設(shè)定點(diǎn):



審核編輯:湯梓紅
-
調(diào)試
+關(guān)注
關(guān)注
7文章
578瀏覽量
33923 -
定位器
+關(guān)注
關(guān)注
2文章
164瀏覽量
17473 -
智能電氣閥門
+關(guān)注
關(guān)注
0文章
4瀏覽量
7018
原文標(biāo)題:多圖詳解西門子閥門定位器調(diào)試
文章出處:【微信號(hào):西北工匠PLC學(xué)習(xí)基地,微信公眾號(hào):西北工匠PLC學(xué)習(xí)基地】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
智能閥門定位器與傳統(tǒng)閥門定位器的比較
BURKERT閥門定位器,00553183現(xiàn)貨促銷
西門子定位器6DR5010-0NN00-0AA0
數(shù)字智能閥門定位器及其應(yīng)用
基于HART協(xié)議的低功耗智能電氣閥門定位器
智能電氣閥門定位器與傳統(tǒng)定位器的對(duì)比
過(guò)采樣技術(shù)在智能電氣閥門定位器中的應(yīng)用_陳維琨
費(fèi)希爾DVC6200系列智能型電氣閥門定位器
防爆型智能電氣閥門定位器的原理及設(shè)計(jì)
幾種常用閥門定位器調(diào)校方法介紹
電氣閥門定位器工作原理及作用
電氣閥門定位器工作接線圖
西門子智能電氣閥門定位器的選型手冊(cè)免費(fèi)下載

西門子智能電氣閥門定位器課件下載





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論