 【潤和軟件DAYU200開發板體驗】03----大禹200內核源碼編譯操作方法
【潤和軟件DAYU200開發板體驗】03----大禹200內核源碼編譯操作方法
本文來源電子發燒友社區,作者:胡智元, 帖子地址:https://bbs.elecfans.com/jishu_2307415_1_1.html
編譯內核感悟:進過艱苦卓越的奮斗,在經歷5天的無盡黑暗之后,終于迎來的曙光。
在剛開始編譯的過程中,添加各種各樣的庫,不會那么盡如人意,
sudo apt-get update && sudo apt-get install binutils binutils-dev git git-lfs gnupg flex bison gperf build-essential zip curl zlib1g-dev gcc-multilib g++-multilib gcc-arm-linux-gnueabi libc6-dev-i386 libc6-dev-amd64 lib32ncurses5-dev x11proto-core-dev libx11-dev lib32z1-dev ccache libgl1-mesa-dev libxml2-utils xsltproc unzip m4 bc gnutls-bin python3.8 python3-pip ruby genext2fs device-tree-compiler make libffi-dev e2fsprogs pkg-config perl openssl libssl-dev libelf-dev libdwarf-dev u-boot-tools mtd-utils cpio doxygen liblz4-tool openjdk-8-jre gcc g++ texinfo dosfstools mtools default-jre default-jdk libncurses5 apt-utils wget scons python3.8-distutils tar rsync git-core libxml2-dev lib32z-dev grsync xxd libglib2.0-dev libpixman-1-dev kmod jfsutils reiserfsprogs xfsprogs squashfs-tools pcmciautils quota ppp libtinfo-dev libtinfo5 libncurses5-dev libncursesw5 libstdc++6 gcc-arm-none-eabi vim ssh locales libxinerama-dev libxcursor-dev libxrandr-dev libxi-dev
看到這些是不是。。。。
接下來才是重點,那該如何快速搭建一個大禹的環境呢?
獨立Docker環境:適用于直接基于Ubuntu、Windows操作系統平臺進行版本編譯的場景。接下來請按照步驟操作。
第一:首先安裝一下Ubuntu系統
18.04或者20.04均可 ,可以到Ubuntu官網下載
第二:下載官方源碼
不用安裝git工具,直接從官網下載:
[zh-cn/release-notes/Readme.md · OpenHarmony/docs - Gitee.com](https://gitee.com/openharmony/docs/blob/master/zh-cn/release-notes/Readme.md)
第三:在Ubuntu的家目錄下安裝
命令1:sudo snap install docker
命令2:sudo apt install docker.io
第四:獲取Docker鏡像
docker pull swr.cn-south-1.myhuaweicloud.com/openharmony-docker/openharmony-docker:1.0.0

第五:進入源碼根目錄執行如下命令,從而進入Docker構建環境
docker run -it -v $(pwd):/home/openharmony swr.cn-south-1.myhuaweicloud.com/openharmony-docker/openharmony-docker:1.0.0
第六:編譯大禹200源碼
編譯命令:
./build.sh --product-name rk3568 --ccache
總結:上面六步,可能是全網最簡單的方法,希望對大家有幫助
編譯時間有點長,耐心等待,
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
dayu200
+關注
關注
1文章
26瀏覽量
1303 -
潤和軟件
+關注
關注
1文章
288瀏覽量
982
發布評論請先 登錄
相關推薦
迅為RK3588開發板實時系統編譯-Preemption系統/ Xenomai系統編譯-獲取Linux源碼包
【iTOP-RK3588 開發板】
開發資料\\\\10_實時系統配套資料\\\\03_Xenomai 實時系統源碼” 源碼名稱說明:
發表于 01-09 11:03
OpenHarmony源碼編譯后燒錄鏡像教程,RK3566鴻蒙開發板演示
本文介紹瑞芯微主板/開發板編譯OpenHarmony源碼后燒錄鏡像的教程,觸覺智能Purple Pi OH鴻蒙開發板演示。搭載了瑞芯微RK3566四核處理器,樹莓派卡片電腦設計,支持開

dayu200 rk3568 openharmony5.0 sim卡 通話服務
想請問一下有人在dayu200 rk3568上插過sim卡并且成功完成過通話服務嗎?
我現在在dayu200上燒錄了openHarmony release 5.0.0版本的鏡像,在上面插上了sim卡,但是仍然顯示未檢測到sim卡?
網上沒有找到類似的情況,希望路過大佬能夠
發表于 12-26 16:52
瑞芯微RK3568開發板Linux編譯報錯404怎么辦?觸覺智能教你輕松解決
本文介紹瑞芯微RK3568主板/開發板SDK編譯流程和編譯報錯404的解決方法,使用觸覺智能EVB3568鴻蒙開發板演示,具有豐富的視頻輸入
用戶手冊 | 全志T113-S3開發板——SDK編譯指南
,不像發行版那樣需要編譯整個linux系統,只需要指定特定開發的功能包進行交叉編譯即可。本文為大家介紹全志T113-S3開發板在眺望電子提供的SDK環境下如何

北京迅為iTOP-LS2K0500開發板快速使用編譯環境虛擬機Ubuntu基礎操作及設置
北京迅為iTOP-LS2K0500開發板快速使用編譯環境虛擬機Ubuntu基礎操作及設置

盤古200 pro開發板
盤古200K開發板采用核心板+擴展板的結構,核心板主要由FPGA+2 顆DDR3+Flash+電源及復位構成,承擔了FPGA的最小系統運行及高速數據處理和存儲的功能。
盤古
發表于 10-28 17:42
如何在NXP源碼基礎上適配ELF 1開發板的PWM功能
本次源碼適配項目是在NXP i.MX6ULL EVK評估板所搭載的Linux內核源碼(版本為Linux-imx_4.1.15)基礎上進行的,主要目標是通過調整功能接口引腳配置,使其適應
linux開發板如何編譯curl
在Linux開發板上編譯 curl 庫通常涉及到幾個步驟,包括準備開發環境、下載源代碼、配置編譯選項以及執行編譯和安裝過程。以下是一個基本的
潤開鴻“龍芯+OpenHarmony”開發平臺DAYU431先鋒派新品發布
潤開鴻基于全新龍芯2K0300芯片平臺的重磅新品潤開鴻HH-SCDAYU431先鋒派開發平臺正式上市,成為潤開鴻DAYU系列產品中符合Ope
ElfBoard技術貼|在NXP源碼基礎上適配ELF 1開發板的按鍵功能
本次源碼適配工作是在NXPi.MX6ULLEVK評估板的Linux內核源碼(特定版本:Linux-imx_4.1.15)基礎上進行的。主要目標是調整功能接口引腳配置,以適應ELF1
鴻蒙OpenHarmony【小型系統 燒錄】(基于Hi3516開發板)
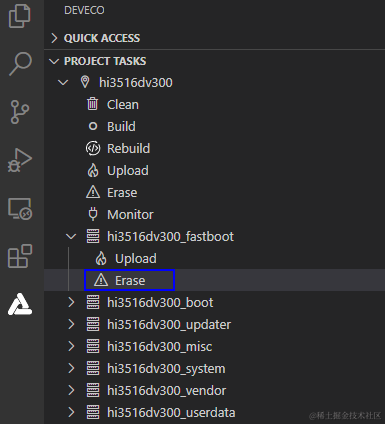
針對Hi3516DV300開發板,除了DevEco Device Tool(操作方法請參考燒錄))外,還可以使用HiTool進行燒錄。
鴻蒙OpenHarmony【標準系統編譯】 (基于RK3568開發板)
DevEco Device Tool支持Rockchip RK3568開發板的源碼一鍵編譯功能,提供編譯工具鏈和編譯環境依賴的檢測及一鍵安裝

鴻蒙OpenHarmony【小型系統編譯】 (基于Hi3516開發板)
DevEco Device Tool支持Hi3516DV300開發板的源碼一鍵編譯功能,提供編譯工具鏈和編譯環境依賴的檢測及一鍵安裝,簡化復

鴻蒙OpenHarmony【輕量系統編譯】 (基于Hi3861開發板)
DevEco Device Tool支持Hi3861V100開發板的源碼一鍵編譯功能,提供編譯工具鏈和編譯環境依賴的檢測及一鍵安裝,簡化復雜





 工商網監
工商網監
評論