 怎樣去使用CANalyzer搭建LIN通信網絡呢
怎樣去使用CANalyzer搭建LIN通信網絡呢
1. 創建LIN工程
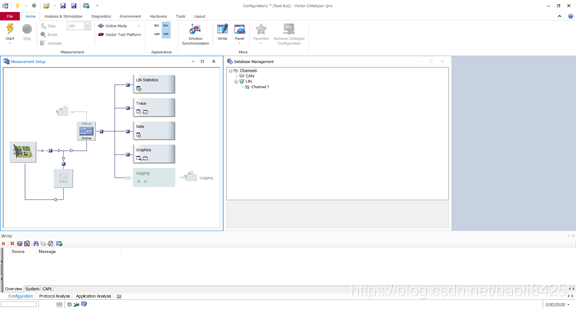
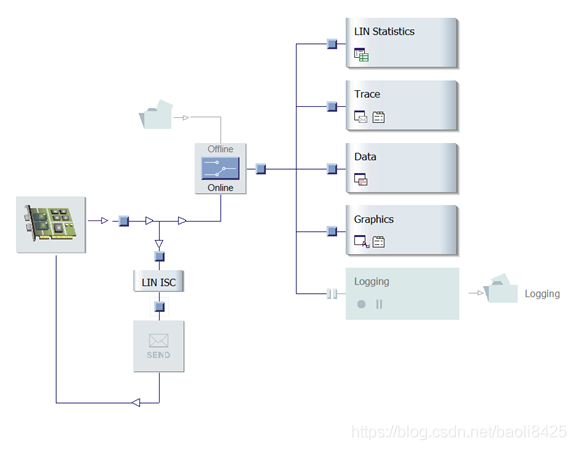
將Vector的盒子連接到電腦,打開CANalyzer,菜單欄選擇File -> New,在Available Templates中雙擊LIN,跳出如下界面。
2. 配置LDF文件及LIN通信報文
2.1 配置報文及信號
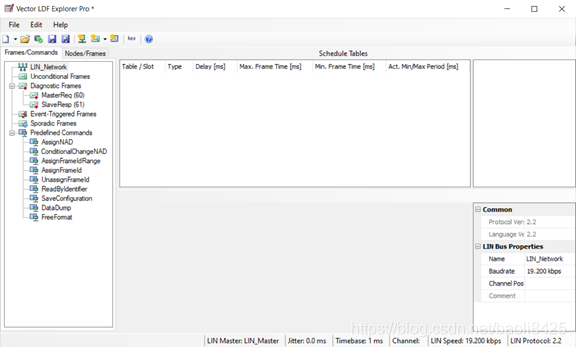
在菜單欄中選擇Tools -> LDF Explorer,跳出如下界面,創建New File。
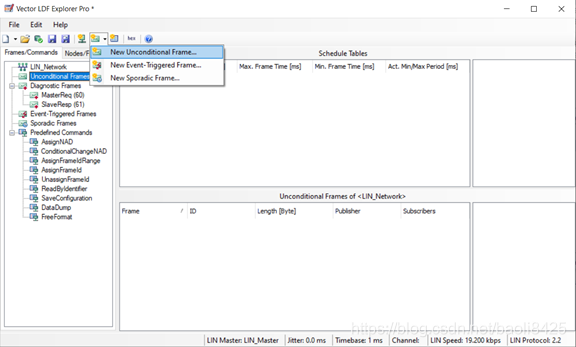
首先點擊New Unconditional Frame添加新的無條件幀。
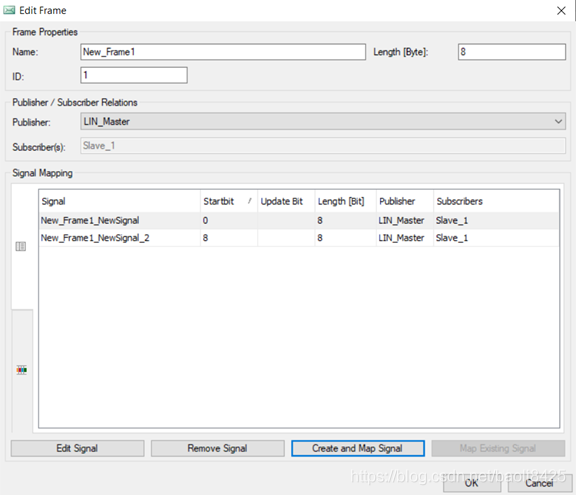
在如下界面中對LIN報文進行配置:
Name:幀名稱; Length[Byte]:幀長度; ID:幀ID,以十進制表示; Publisher:幀的發送單元; Subscriber:幀的接收單元;
Signal Mapping:信號矩陣;
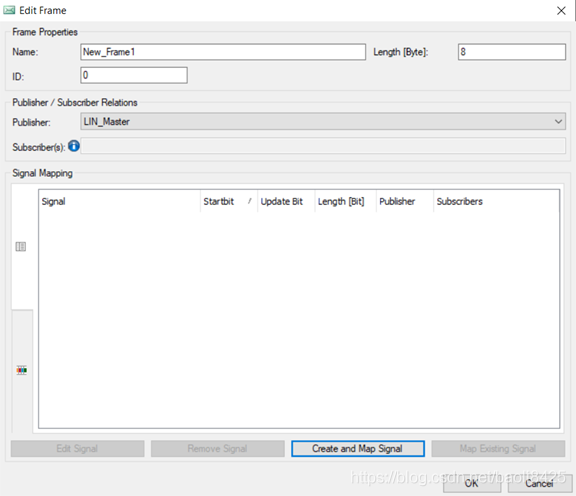
點擊Create and Map Signal,創建信號矩陣及定義信號,跳出如下界面。
在Signal Properties選項卡內配置
Name:信號名稱; Initial Value:初始值; Signal Type:信號類型,分為Scalar和Byte Array;
Length[Bit]:信號長度,最多8bit;
在Physical選項卡內配置
Minimum[raw]:最小物理量; Maximum[raw]:最大物理量; Unit:該物理量對應的單位; Factor:放大系數;
Offset:物理量的補償;
在Publisher/Subscriber Relations選項卡內配置
ECUs:發送單元;
Subscriber(s):接收單元;
在Mapping選項卡內配置
Position on Frame[Bit]:該信號在報文中的起始位。

在報文中添加信號后如下圖所示。
2.2 配置調度表
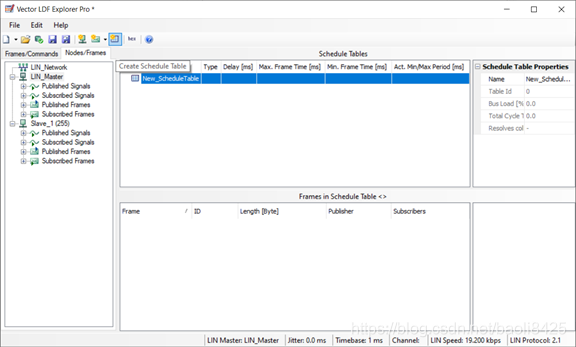
在菜單欄如下位置選擇Create Schedule Table,添加幀的調度表。
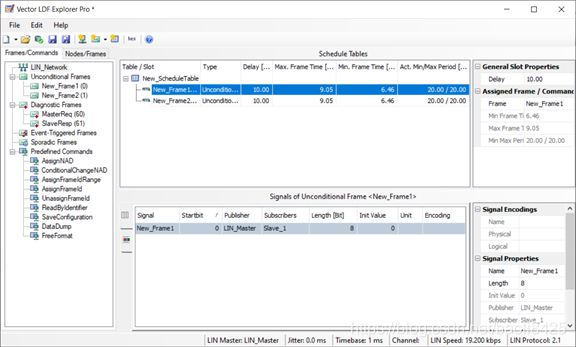
將Unconditional Frames中創建的無條件幀拖動到調度表中,并保存設置,如下圖所示。
2.3 配置時序
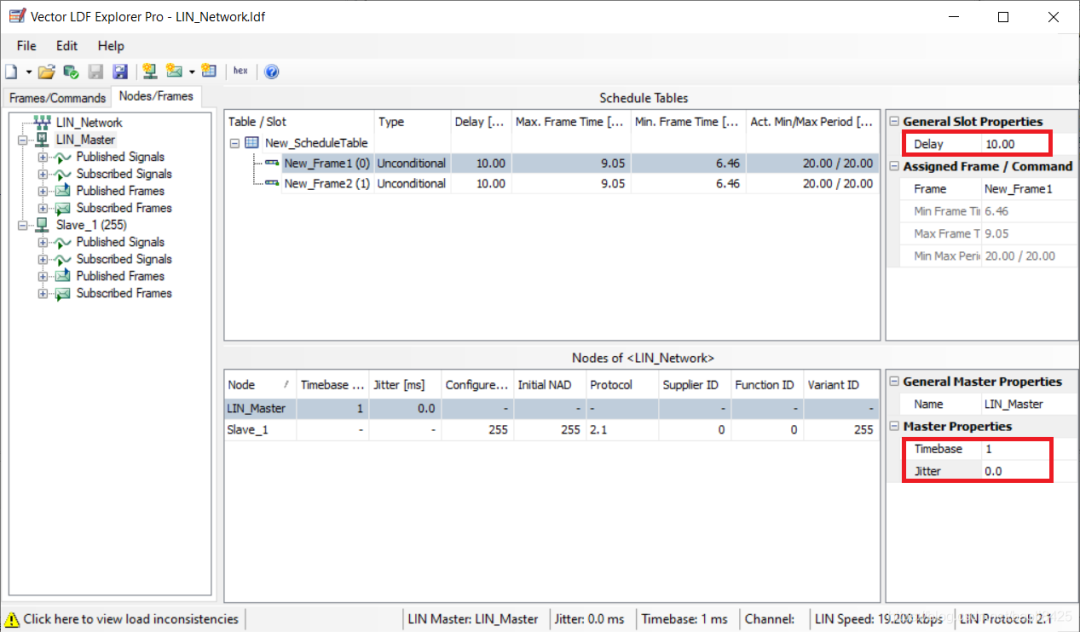
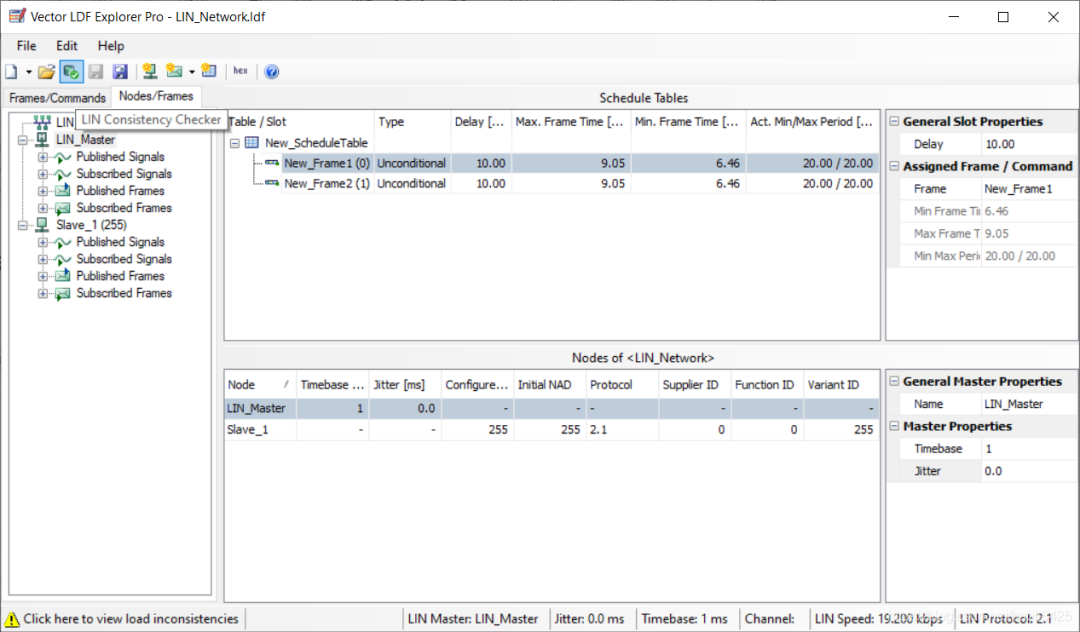
選擇Nodes/Frames,點擊左側方框中的主節點名稱,這里是LIN_Master,并選擇調度表中的報文。此時右側方框如下圖所示,根據客戶需求分別修改Delay(時隙)、Timebase(基時)、Jitter(偏移)。
2.4 檢查及保存配置
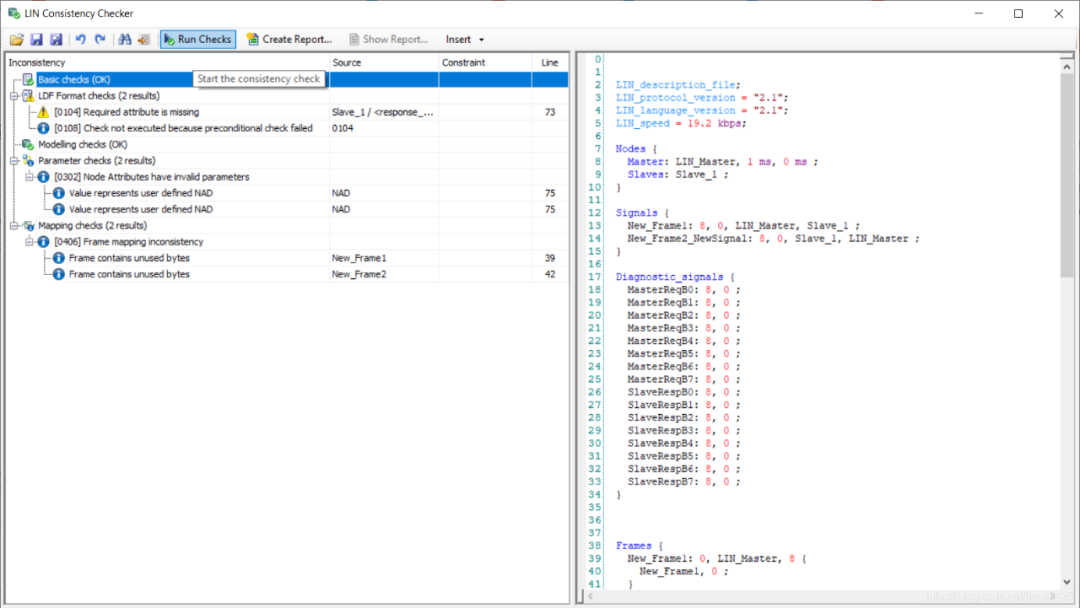
保存配置,然后在菜單欄如下位置點擊LIN Consistency Checker,進入LDF文件的錯誤檢查。
出現如下界面后,選擇Start the consistency check開始檢查。如果存在錯誤或者警告,左側欄中會提示相應的問題。
2.5 導入LDF文件
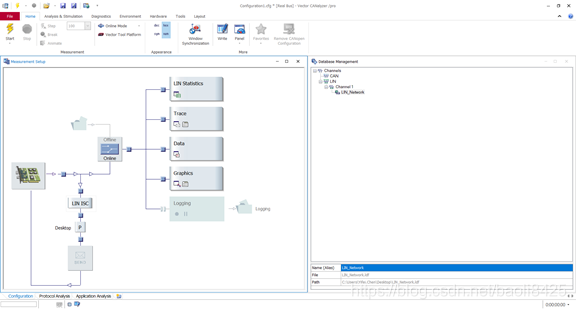
回到主界面,在右側方框內,右擊Channel 1,選擇Add Database,將保存的LDF文件導入進來,如下圖所示。
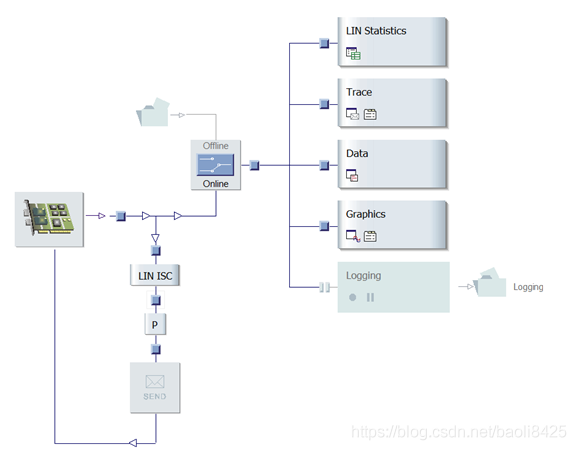
右擊如下位置的藍色小方塊,選擇如下Insert LIN Interactive Scheduler。
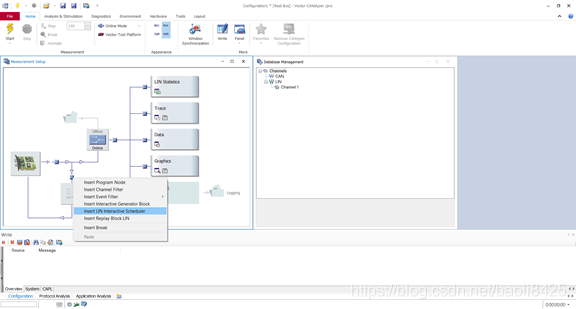
添加完之后,會出現一個灰色方塊LIN ISC,界面如下圖所示。
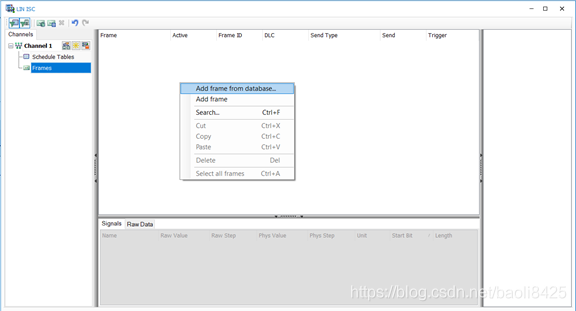
點擊灰色方塊LIN ISC,在跳出來的界面里面選擇Frames,并在中間空白區域右擊選擇Add frame from database添加報文和調度表。
3. 添加和配置CAPL模塊
在菜單欄中選擇Tools -> CAPL Browser,跳出如下界面。
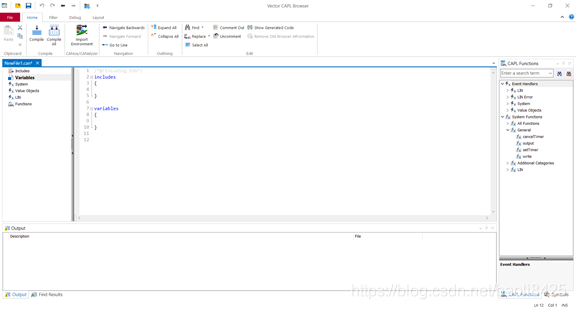
編寫相關的CAPL代碼,并保存。
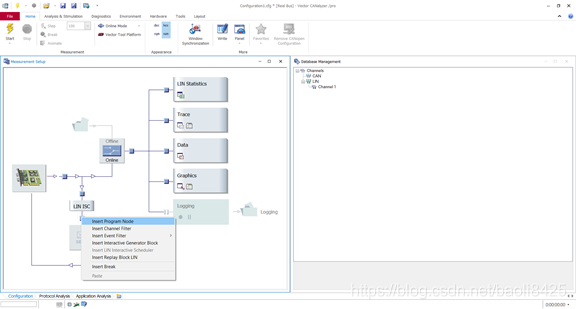
回到主界面,右擊如下位置的藍色小方塊,選擇如下Insert Program Node。
若跳出如下顯示框,選擇Yes。
添加完之后,會出現一個灰色方塊P,界面如下圖所示。
雙擊灰色方塊P,選擇相應的CAPL文件。
4. 運行工程
在Home菜單欄中點擊黃色閃電圖標Start,開始運行,如下圖所示。
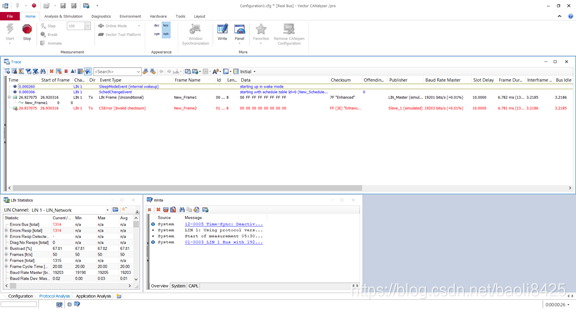
相關報文信息會顯示在Trace界面上,若需要其他的顯示監控界面,可在Analysis & Stimulation菜單欄中選擇添加。
審核編輯:劉清
-
CAN
+關注
關注
57文章
2744瀏覽量
463623 -
ecu
+關注
關注
14文章
886瀏覽量
54485 -
LIN
+關注
關注
4文章
216瀏覽量
40275 -
通信網絡
+關注
關注
21文章
2033瀏覽量
52016 -
CAPI
+關注
關注
0文章
5瀏覽量
12498
原文標題:使用CANalyzer搭建LIN通信網絡
文章出處:【微信號:eng2mot,微信公眾號:汽車ECU開發】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論