 CRC和Checksum信號的區別 Checksum信號在CAPL中實現的方法
CRC和Checksum信號的區別 Checksum信號在CAPL中實現的方法
CRC與Checksum區別
相信大家在CAN Msg或者ETH PDU中經常會看到Checksum這種信號。提到Checksum,就必須要說明一下CRC校驗,很多工程師會概念混淆,認為兩者是同一個東西,實則它們有很大的區別。
01兩者存放位置不同
CRC校驗:循環冗余檢查(CRC)是一種數據傳輸檢錯功能,對數據進行多項式計算,并將得到的結果附在幀的后面,接收設備也執行類似的算法,以保證數據傳輸的正確性和完整性。
通過CRC概念可以得知,CRC存放在CRC場,而Checksum存放在數據場之中,一般在數據場的第一個字節或者最后一個字節。

圖1 標準數據幀格式
02兩者應用場景不同
在CAN報文幀中,CRC校驗是發送器根據發送的bit進行多項式計算校驗,結果放在15bit長度的CRC位。接收器也是用相同的多項式計算總線上的數據,與接收到的校驗值進行比較,相同則表示幀正確接收,并在ACK時隙中發送顯性狀態,覆蓋發送器的隱性位;如果不同接收節點在ACK界定符之后發送錯誤幀。
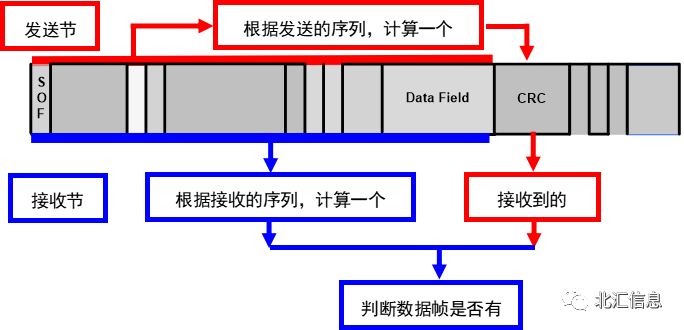
圖2 CRC校驗原理
CRC校驗是為了保證數據從一個CAN收發器發送到另外一個收發器的信號完整性,而數據場中Checksum校驗算法是為了校驗數據被正確的打包與解包,并且Checksum算法是可以自行制定的,計算規則的靈活度高。
Checksum的應用場景
對于Checksum而言,它的應用場景有以下三點:
01確保數據正確打包
有些ECU內部的變量在傳遞到CAN收發器之前就有可能發生錯誤,這種類型的錯誤CAN收發器是無法檢測到的。報文中的信號和Checksum校驗是在應用層完成的,將報文中的各個字節進行校驗,報文和Checksum一起發送,并且在接收節點進行解析,從而確保數據鏈路完整和數據正確打包。
02實現數據加密
CAN網絡是開放性的,CAN節點可以隨時加入到總線當中,為了保證通信的安全性,ECU傳輸的關鍵控制信號需要進行加密,報文的發送方和接收方使用相同的Checksum算法作為數據加密的密鑰。接收方對比秘鑰,如果不同,此條報文的數據不被使用,從而避免被其他節點的數據影響。Checksum算法不在DBC等數據庫文件中說明,可以單獨保密,從而確保了數據的加密。
03提高數據的可信度
一幀報文在多個字節中可能出現位錯誤,一般情況下CRC8校驗的錯誤率為1/256,crc16校驗的錯誤率為1/65536,crc32校驗的錯誤率為1/(65536*65536)。通過Checksum校驗可以提高數據的可信度。
由于Checksum的作用,其也常應用在車載以太網當中。
在CAPL中Checksum信號實現
通常情況下,Checksum和LiveCounter信號是成對出現的。在CANoe中使用仿真節點與真實控制器交互,需要將LiveCounter和Checksum信號仿真,這樣才能成功通信。LiveCounter長度為4bit,它是用于報文發送計數的生命信號,每發送一幀報文后就對該LiveCounter位加1,會在0~15之間循環增加。在報文其他信號沒有改變時,LiveCounter實時更新使得Checksum信號跟著更新,提高校驗的準確性。那么LiveCounter信號該如何仿真呢?下面以CAN總線DBC為例,介紹在CAPL中實現LiveCounter和Checksum校驗仿真。
CAPL是CANoe和CANalyzer中可用的類C的編程語言。CAPL中程序塊的執行由事件控制,在專用的編譯器中開發和編譯,這樣可以訪問數據庫中的所有對象以及系統變量,被汽車電子工程師們廣泛使用。
下圖為LiveCounter計算的代碼,為了保證數據的準確性,進行一次Checksum計算,這樣就可以實現LiveCounter信號的仿真。
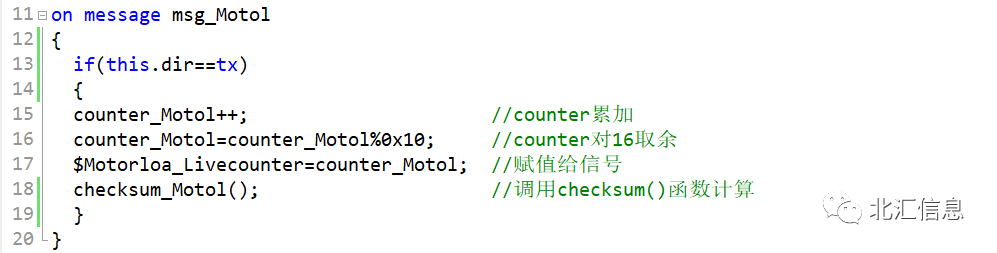
圖3 LiveCounter計算代碼
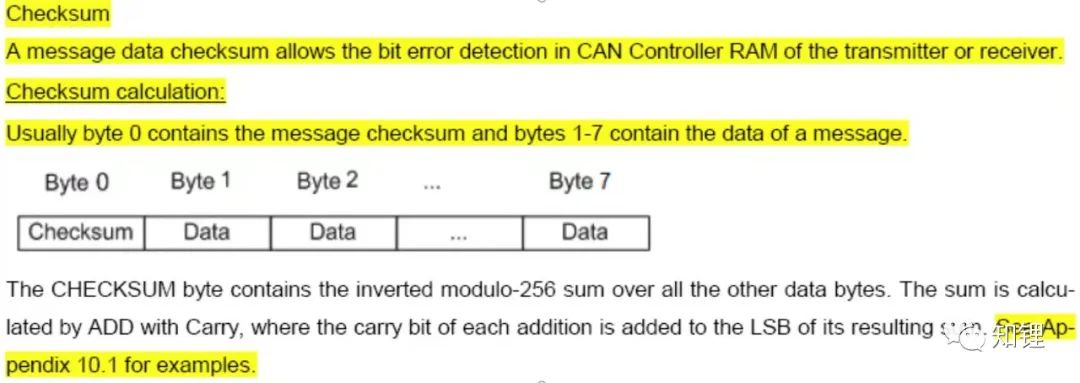
下圖為示例報文中各個信號位置排布關系,在此報文中,Checksum校驗方式為前七個字節異或運算,將運算結果存放到最后一個字節。排布圖中共有8個信號,它們的格式為Motorola格式,也就是俗稱的大端模式。
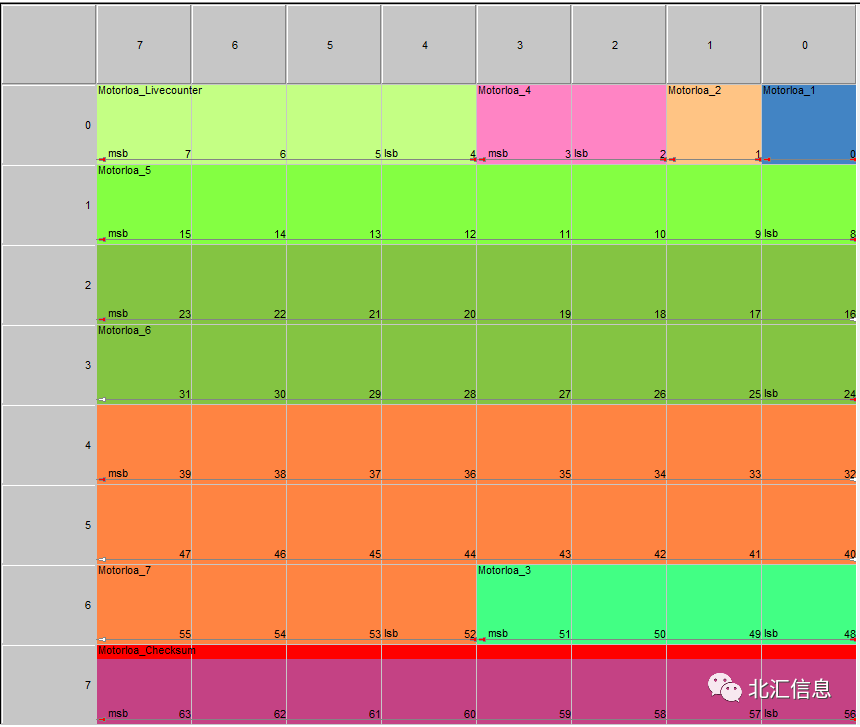
圖4 報文中信號排布
CAPL只能訪問到報文中的信號,無法訪問到報文中的每個字節,要進行Checksum計算,需要根據信號排布把前七個字節的真實值重新組合存放在一個byte類型的數組當中,然后對這個數組異或運算獲取的結果為該報文中Checksum信號值。
對于不同長度的信號,需要聲明不同類型的數組來存放不同的信號。byte類型長度為1字節,聲明兩個byte *[8]類型的數組(*為省略的數組名稱)分別存放長度小于一字節的信號和重組后每個字節的真實值;int類型長度為2字節,聲明int *[8]類型的數組存放長度為1-2字節的信號;long類型長度為4字節,聲明long *[8]類型的數組存放長度為2-4字節的信號。下圖為Checksum中信號長度小于1字節的字節重組示例代碼。
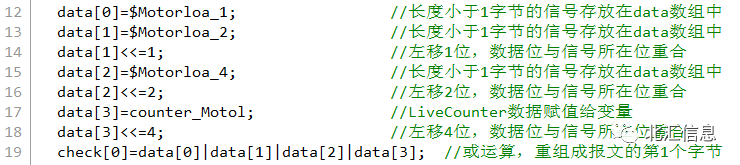
圖5 Checksum字節重組示例代碼
另外,參與Checksum計算的是信號的真實值而不是物理值,如果信號中有偏移量和比例因子,在賦值時需要將信號加上偏移量,并除以比例因子以獲得真實值。
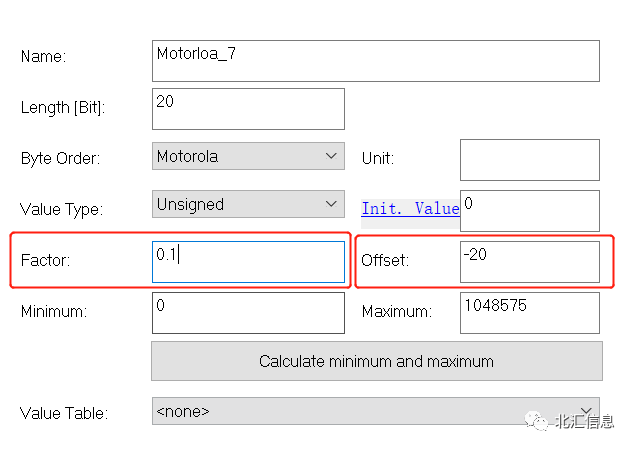
圖6 信號描述
為了保證和真實控制器通信正常,Checksum數據必須準確,Checksum計算步驟一般寫成無返回值函數(void),在LiveCounter信號改變或者其他信號改變時調用計算。
正確計算的LiveCounter和Checksum信號曲線如下圖所示。
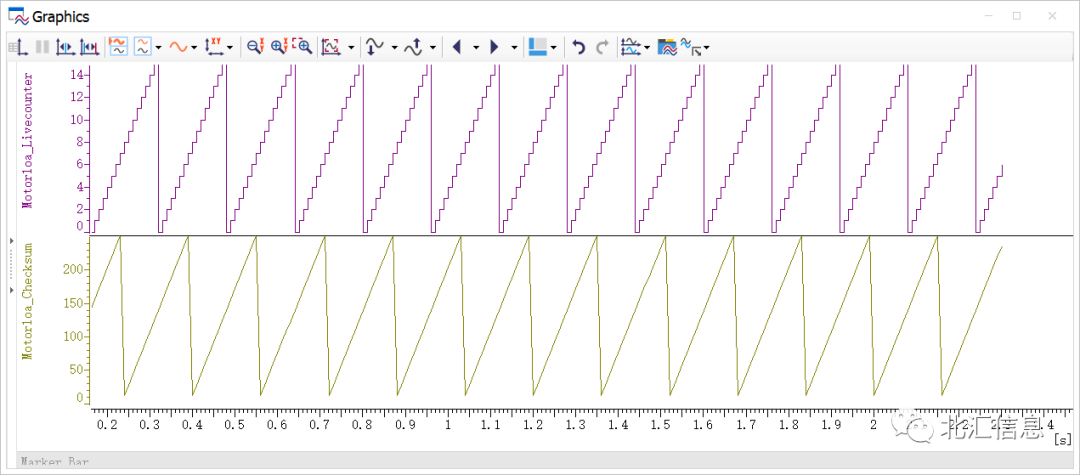
圖7 LiveCounter和Checksum信號曲線
總結
本文重點描述了CRC和Checksum信號的區別以及Checksum信號在CAPL中實現的方法。CAPL編程作為CANoe的靈魂,使CANoe滿足仿真、分析、測試和診斷的各種復雜的要求,同時使CANoe的功能得以不斷擴展。
北匯信息作為Vector中國的合作伙伴,致力于為中國汽車客戶提供優質的工具支持、解決方案以及測試服務。
注:圖片來自于Vector。
審核編輯:湯梓紅
-
CAN
+關注
關注
57文章
2756瀏覽量
463879 -
crc
+關注
關注
0文章
199瀏覽量
29481 -
信號
+關注
關注
11文章
2794瀏覽量
76852
原文標題:CAPL編程的進階應用 | Checksum算法的實現
文章出處:【微信號:QCDZSJ,微信公眾號:汽車電子設計】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
在IAR Embedded Workbench中計算多個地址區間的Checksum
求助,關于PSOC4模擬EEPROM的checksum問題求解

如何在IAR中配置CRC參數
請問如何在IAR中配置CRC參數?
TMS320LF2403A下載時提示的Checksum計算方法?
M451芯片FMC讀寫flash中,如何使用checksum功能?
新功能發布 | TSMaster如何實現checksum和rolling counter的本地化支持

CAPL編程的進階應用 | Checksum算法的實現







 工商網監
工商網監
評論