 基于SupSLAM視覺慣性SLAM方法在無人機中的應用研究
基于SupSLAM視覺慣性SLAM方法在無人機中的應用研究
近年來,使用機器學習技術進行特征提取的基于調制解調器特征的SLAM越來越受到關注,并有望在幾乎所有機器人工作環境中超越傳統方法。這種方法利用經過訓練的網絡來學習關鍵點,從而增強可視化SLAM數據關聯的魯棒性。現代基于特征的SLAM也有望為實時映射生成可靠的感知圖,因為基于學習的特征點更具可重復性和均勻分布性。此外,這些局部特征可以用作神經對應網絡的輸入,以消除異常值,從而使姿態估計變得更加準確。另一方面,由于資源有限,無人機上的SLAM經常對計算構成限制。在這種情況下,基于特征的SLAM更相關,因為提取的興趣點可以稍后用于與分割和對象檢測相關的任務。
因此,提取特征點的方法在SLAM中起著關鍵作用。我們引入了一種名為SupSLAM的視覺慣性SLAM方法,該方法基于一種稱為超級點的新特征點的使用。這些特征點通過深度神經網絡從SLAM前端的輸入圖像中提取的。我們的SLAM前端只需要一個帶有IMU作為輸入的立體攝像頭。姿態估計由多狀態約束卡爾曼濾波器(MSCKF)進行,而軌跡可靠性則由后端運行的圖形優化過程維護。
系統架構
圖1 中顯示了表示我們的SLAM系統的圖表。該系統使用立體攝像頭作為輸入來提取環境特征。該相機配有IMU,用于測量線性加速度和角速度。然后通過前端和后端模塊處理來自輸入設備的數據。
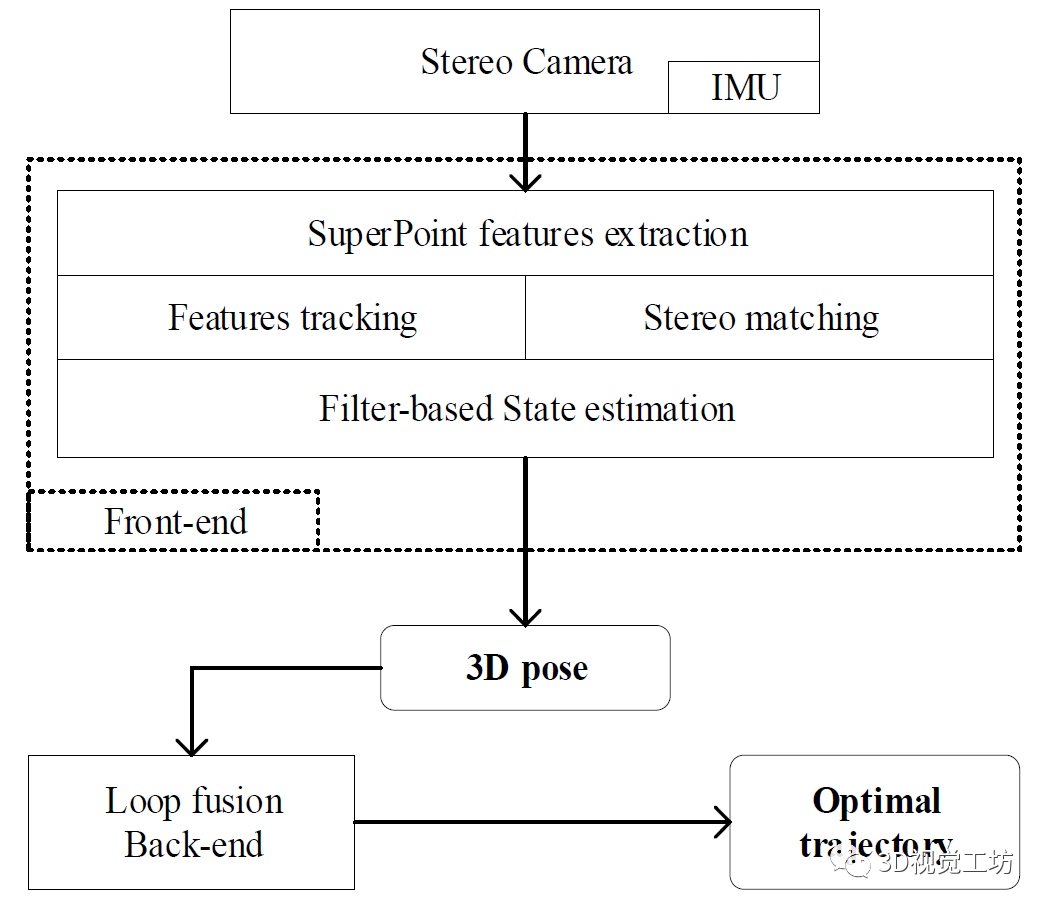
圖1系統概述
前端從輸入數據中提取特征點,然后在左右攝像頭之間匹配它們以獲取深度信息。然后將這些信息提供給多態約束MSCKF,以估計無人機的3D姿態。另一方面,后端跟蹤關鍵幀中的要素,以執行映射一致性和軌跡估計的循環閉包過程。因此,前端表現為視覺慣性里程計(VIO),以提供無人機姿勢的實時估計,而后端則跟蹤并隨時間調整姿勢。
SLAM 中數據關聯的超級點
SuperPoint是一個完全卷積的神經網絡,它在單個正向傳遞和運行中計算2D特征點位置和描述符。在我們的工作中,我們只考慮特征點,以降低計算成本并保持匹配結果的一致性。所用超級點的體系結構如圖 2所示。
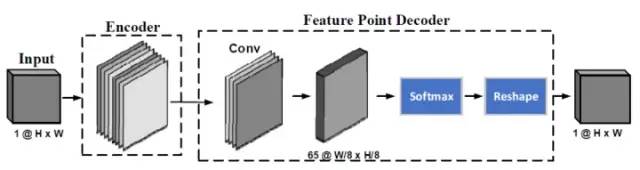
圖2超級點的模型架構
實驗設置
實驗數據是從框架尺寸為40cm x40cm的四軸飛行器中收集的。IMU更新速率為200 Hz。立體相機的基線為7厘米,分辨率為752x480,速度為每秒20幀。SLAM系統在C++中使用OpenVINS框架實現。OpenCV和庫用于圖像處理。為了實時性能,要跟蹤的視覺特征數限制為400個,當活動點數降至300以下時,將添加新的特征點。預訓練的深度神經網絡用于以752x480的分辨率從輸入圖像中提取特征。MSCKF中的時間窗口設置為3秒。在后端,每隔1.2米向姿勢圖添加新的關鍵幀。
數據準備
真實數據和合成數據都用于實驗。真實數據包括EuRoC數據集中名為MH3,MH4和MH5的三個最復雜的序列,其中無人機沿著機房飛行。合成數據包括兩個場景,分別代表一個農村農場和一個城市地區,這些場景是由我們從AirSim開發的工具集生成的,如圖3所示。

圖3用于實驗的農村農場和城市地區的綜合場景
評價指標
我們使用兩個指標進行性能評估,包括絕對軌跡誤差(ATE)和相對軌跡誤差(RTE)。計算ATE的方法是首先將估計的軌跡與地面實況對齊,然后測量它們之間的差異,如圖4a所示。RTE的計算方法是將估計的軌跡劃分為段dk然后將每個線段與地面實況軌跡對齊,以計算誤差,如圖4b所示。
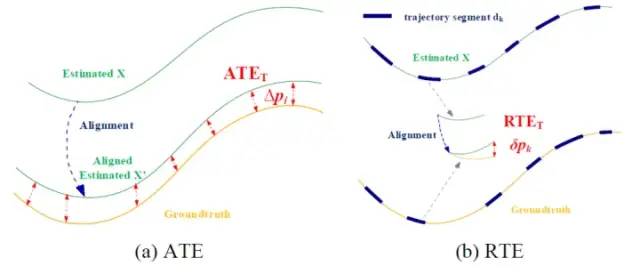
圖4評估指標的圖示(a) 絕對軌跡誤差和(b) 相對軌跡誤差
SLAM結果
圖5 顯示了SuperPoint在三個場景中檢測到的特征點,包括城市地區、農村農場和機房,具有兩種不同的設置,即100個和400個特征點。可以看出,角落,邊緣,顏色變化等特征被很好地檢測到。此外,檢測到的特征分布在圖像中,因此算法對某些對象的依賴性較小。
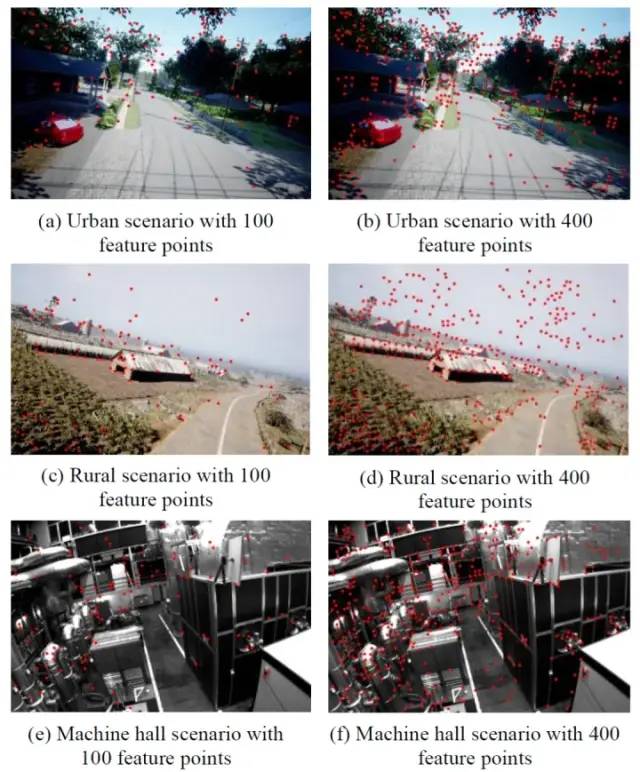
圖5超級點檢測到的特征點圖6顯示了檢測到的特征點在左右圖像之間的對應關系。可以看出,大多數特征點都正確匹配,這意味著提取的深度信息是可靠的。

圖6超級點檢測到的特征點
在不同時間捕獲的兩個圖像幀之間的特征點的跟蹤Δt=0.3s如圖7a 所示。由于檢測到的特征點分布在圖像中,因此幀之間的共同特征點的數量得到了很好的維護,這對于穩定的SLAM非常重要。
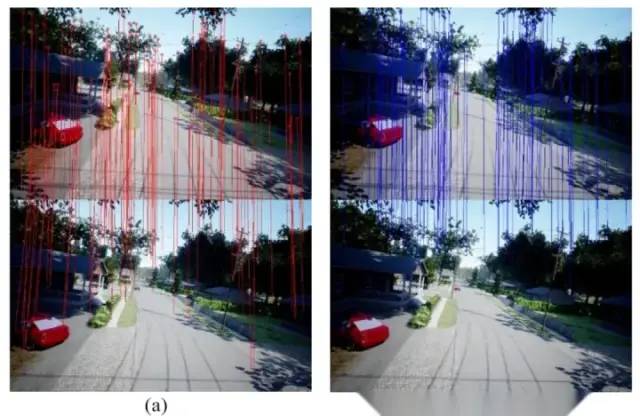
圖7使用時差捕獲(a) FAST和(b)兩幀中的超級點的跟蹤結果Δt=0.3s
圖 8 顯示了LoopF數據集的SLAM結果,其中無人機在農村農場上空飛行兩輪。可以看出,最終估計的軌跡(紅線)即使在近500米的長距離上也能很好地跟蹤地面實況軌跡(黃線)。
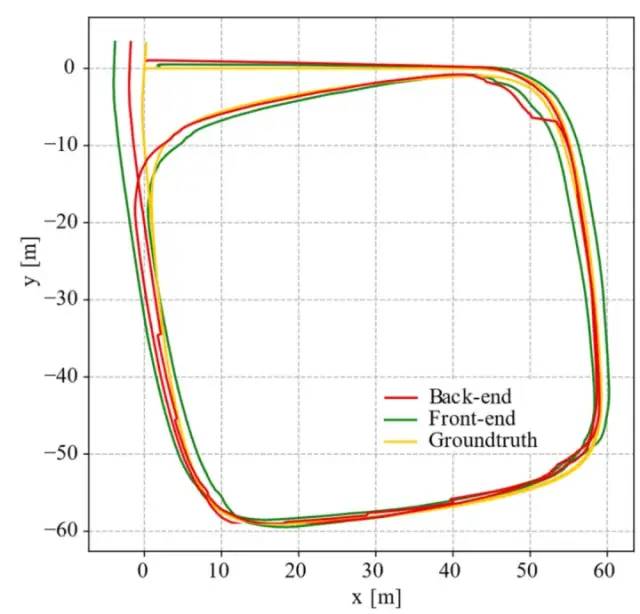
圖8LoopF數據集的無人機軌跡包括地面實況軌跡(黃線)、前端估計(綠線)和后端估計(紅線)
結果比較
為了進一步評估我們方法的性能,我們與OpenVINS 進行了比較,OpenVINS是一種最先進的SLAM系統,使用FAST進行特征提取。圖9顯示了FAST檢測到的特征點。與SuperPoint不同,這些特征點集中在某些對象(如植物、房屋或機器)周圍。因此,當物體移出場景時,不同時間拍攝的圖像幀之間的共同特征點數量顯著減少,如圖7b所示。這個問題反過來又會影響SLAM的結果。
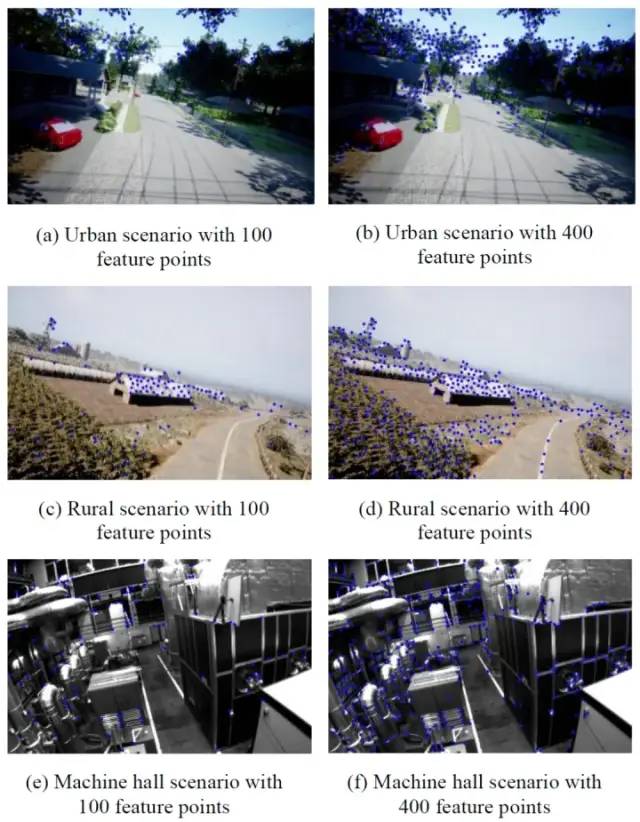
圖9FAST檢測到的特征點
為了評估SupSLAM的性能,我們進行了許多實驗,并與真實和合成數據集進行了比較。結果驗證了我們提出的無人機系統的有效性和有效性。
審核編輯:郭婷
-
濾波器
+關注
關注
161文章
7796瀏覽量
177999 -
調制解調器
+關注
關注
3文章
854瀏覽量
38804 -
機器學習
+關注
關注
66文章
8408瀏覽量
132568
原文標題:【光電智造】一種強大的視覺慣性SLAM系統SupSLAM釋
文章出處:【微信號:今日光電,微信公眾號:今日光電】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
科技防線:無人機干擾系統如何保障空域安全 特信無人機反制
無人機智能巡檢系統
千億級民用無人機市場,酷芯微無線傳輸、視覺處理解決方案搶跑市場
演唱會無人機亂飛,無人機反制槍守護安全|特信無人機反制
無人機遙感技術在農業病蟲害監測中的應用研究






 工商網監
工商網監
評論