 【米爾MYD-J1028X開發板試用體驗】體驗米爾MYD-J1028X開發板 NXP LS1028A處理器 CPU調頻策略
【米爾MYD-J1028X開發板試用體驗】體驗米爾MYD-J1028X開發板 NXP LS1028A處理器 CPU調頻策略
本文來源電子發燒友社區,作者:mameng, 帖子地址:https://bbs.elecfans.com/jishu_2308826_1_1.html
MYC-J1028X核心板尺寸82*45mm,基于NXP LS1028A處理器,板卡采用12層高密度PCB設計,沉金工藝生產,獨立的接地信號層,無鉛。核心板和底板采用314PIN MXM3.0金手指連接器連接,性價比高。Layerscape? LS1028A系列工業應用處理器專為實現工業物聯網而設計,它集成了 3D圖像功能、支持TSN的以太網、高性能PCIe? Gen 3.0 接口。4


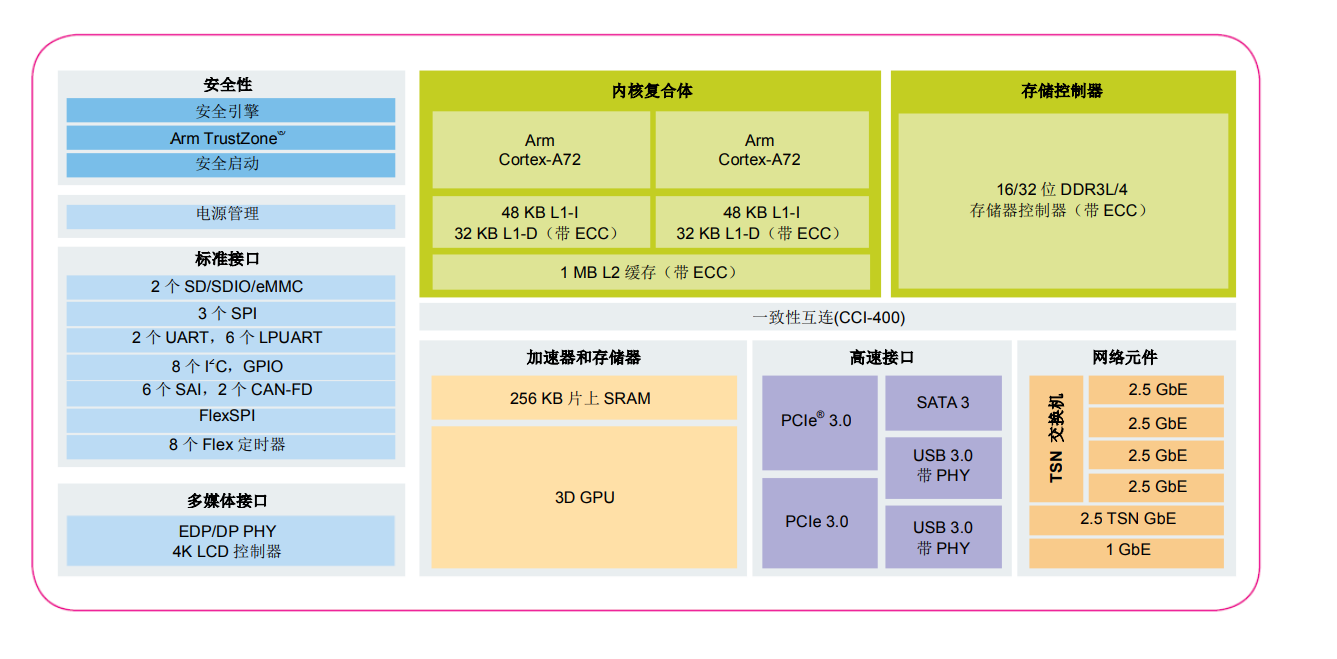
LAYERSCAPE LS1028A框圖:
該系列SoC集成了高性能ARM? Cortex?-A72處理器、支持TSN的以太網交換、帶安全引擎的可信架構、支持4K顯示的3D GPU以及集成式DisplayPort/嵌入式DisplayPort接口。用于工業物聯網中的融合網絡的TSN為了將工業物聯網和工業4.0變成現實,制造商必須將制造和自動化系統等操作技術 (OT) 與庫存、物流、客戶關系管理系統等信息技術 (IT) 互連。實現兩個功能域之間的信息流通,將能提高效率和縮短產品交付時間。時間敏感型網絡 (TSN) 實現了IT和OT的融合,使用千兆以太網來實現高帶寬,同時又使用傳統IT設備,但是增加了各種功能,例如時間感知整形、幀搶占調度、幀復制和消除,以確保滿足OT網絡要求。LS1028A能夠利用支持TSN的交換機來支持菊花鏈或環形部署,或者利用支持TSN的以太網控制器來支持端點應用。安全性LS1028A系列SoC使用可信架構提供的各種功能,例如安全啟動、完全密鑰存儲和篡改檢測,能夠實現可信平臺。安全引擎 (SEC) 可為加密以太網通信和磁盤存儲提供加密加速。SEC還可降低公鑰/私鑰事務處理負載,并且支持橢圓曲線加
CPU的頻率調節模式:
1. Performance. 不考慮耗電,只用最高頻率。
2. Interactive. 直接上最高頻率,然后看CPU負荷慢慢降低。
3. Powersave. 通常以最低頻率運行,流暢度會受影響,一般不會用這個吧!
4. Userspace. 可以在用戶空間手動調節頻率。
5. Ondemand. 定期檢查負載,根據負載來調節頻率。
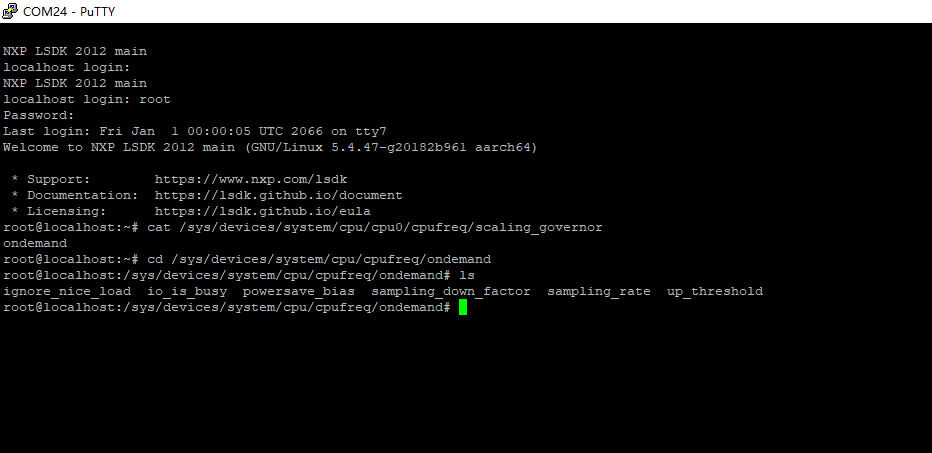
開發板通過串口登錄系統:
查看MYC-J1028X開發板設置CPU調頻策略指令:
復制代碼
默認情況下開發板啟動后CPU調頻策略為ondemand。
1.Performance:CPUfreq 被設置成scaling_min_freq和scaling_max_freq中的最高頻率,
2.Powersave::CPUfreq 被設置成scaling_min_freq和scaling_max_freq中的最低頻率;
3.Userspace:允許root權限的用戶通過sysfs的“scaling_setspeed字段將cpu頻率設置成用戶想要的頻率。
4.Ondemand:根據當前CPU使用情況調頻,該調頻策略的參數位于:
/sys/devices/system/cpu/cpufreq/ondemand
打開:查看文件;
sampling_rate:該間隔是查詢CPU負載間隔,并根據CPU負載做對應的事
sampling_rate_min:采樣間隔的最小值有硬件延遲或者內核限制
up_threshold:定義了根據sampling_rate間隔的cpu使用情況內核需要增加cpu頻率的門限
ignore_nice_load:該參數的值是0或者1,如果是0,則統計cpu使用率時會統計所有cpu,如果被設置成1,則運行“nice”值的cpu將不會被統計到cpu使用率。
smapling_down_factor:該值控制當cpu運行在高主頻時的降頻行為,當設置成1(缺省值),則在調頻時會重新評估cpu使用率,當設置成大于1的值(如100),在高負載時其和輪詢時間間隔的乘積將作為查詢負載的間隔,這用于減少cpu開銷,讓cpu更多的停留在較高主頻。
interactive:其設計的目標是對低延遲的使用場景的響應。其調頻策略類似“ondemand”,但是設置的參數值和“ondemand”是有區別的,主要來說就是升頻率快,降頻慢。
查看當前CPU頻率:
/sys/devices/system/cpu/cpu0/cpufreq # catscaling_cur_freq
600000

復制代碼
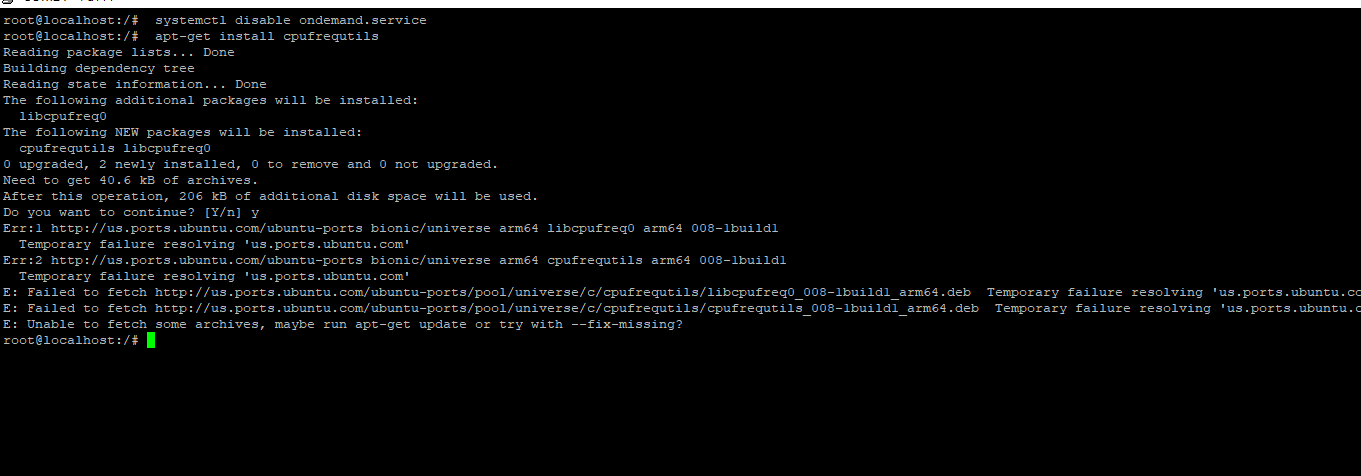
如果想使用其它策略,以高性能模式為例,返回根目率,可以進行如下設置,root@forlinx:/# systemctl disable ondemand.service
root@forlinx:/# apt-get install cpufrequtils
修改
root@forlinx:/# vi /etc/default/cpufrequtils
添加
GOVERNOR="performance"
重啟測試
root@forlinx:/# cat /sys/devices/system/cpu/cpu0/cpufreq/scaling_governor
performance
實際過程cpu1、cpu2、cpu3會同時改變。
— CPU默認調度策略
策略初始化注冊完之后,會開一個定時器,周期檢測系統負載變化來動態調節頻率,流程如下:
cpufreq_interactive_timer -> //timer會被定期執行計算當前系統負載
wake_up_process(speedchange_task) -> //喚醒負載計算線程
cpufreq_interactive_speedchange_task ->
__cpufreq_driver_target ->
cpufreq_driver->target ->
cpufreq_target -> rockchip-cpufreq.c
cpufreq_frequency_table_target //設置的target freq要在policy的運行范圍內
dvfs_clk_set_rate->
clk_dvfs_node->vd->vd_dvfs_target ->
dvfs_target ->
dvfs_get_limit_rate//這里會判斷溫度的litmit值(temp_limit_rate變量)
clk_set_rate
MYC-J1028X核心板尺寸82*45mm,基于NXP LS1028A處理器,板卡采用12層高密度PCB設計,沉金工藝生產,獨立的接地信號層,無鉛。核心板和底板采用314PIN MXM3.0金手指連接器連接,性價比高。Layerscape? LS1028A系列工業應用處理器專為實現工業物聯網而設計,它集成了 3D圖像功能、支持TSN的以太網、高性能PCIe? Gen 3.0 接口。4
LAYERSCAPE LS1028A框圖:
該系列SoC集成了高性能ARM? Cortex?-A72處理器、支持TSN的以太網交換、帶安全引擎的可信架構、支持4K顯示的3D GPU以及集成式DisplayPort/嵌入式DisplayPort接口。用于工業物聯網中的融合網絡的TSN為了將工業物聯網和工業4.0變成現實,制造商必須將制造和自動化系統等操作技術 (OT) 與庫存、物流、客戶關系管理系統等信息技術 (IT) 互連。實現兩個功能域之間的信息流通,將能提高效率和縮短產品交付時間。時間敏感型網絡 (TSN) 實現了IT和OT的融合,使用千兆以太網來實現高帶寬,同時又使用傳統IT設備,但是增加了各種功能,例如時間感知整形、幀搶占調度、幀復制和消除,以確保滿足OT網絡要求。LS1028A能夠利用支持TSN的交換機來支持菊花鏈或環形部署,或者利用支持TSN的以太網控制器來支持端點應用。安全性LS1028A系列SoC使用可信架構提供的各種功能,例如安全啟動、完全密鑰存儲和篡改檢測,能夠實現可信平臺。安全引擎 (SEC) 可為加密以太網通信和磁盤存儲提供加密加速。SEC還可降低公鑰/私鑰事務處理負載,并且支持橢圓曲線加
CPU的頻率調節模式:
1. Performance. 不考慮耗電,只用最高頻率。
2. Interactive. 直接上最高頻率,然后看CPU負荷慢慢降低。
3. Powersave. 通常以最低頻率運行,流暢度會受影響,一般不會用這個吧!
4. Userspace. 可以在用戶空間手動調節頻率。
5. Ondemand. 定期檢查負載,根據負載來調節頻率。
開發板通過串口登錄系統:
查看MYC-J1028X開發板設置CPU調頻策略指令:
- root@forlinx:/# cat /sys/devices/system/cpu/cpu0/cpufreq/scaling
默認情況下開發板啟動后CPU調頻策略為ondemand。
1.Performance:CPUfreq 被設置成scaling_min_freq和scaling_max_freq中的最高頻率,
2.Powersave::CPUfreq 被設置成scaling_min_freq和scaling_max_freq中的最低頻率;
3.Userspace:允許root權限的用戶通過sysfs的“scaling_setspeed字段將cpu頻率設置成用戶想要的頻率。
4.Ondemand:根據當前CPU使用情況調頻,該調頻策略的參數位于:
/sys/devices/system/cpu/cpufreq/ondemand
打開:查看文件;
sampling_rate:該間隔是查詢CPU負載間隔,并根據CPU負載做對應的事
sampling_rate_min:采樣間隔的最小值有硬件延遲或者內核限制
up_threshold:定義了根據sampling_rate間隔的cpu使用情況內核需要增加cpu頻率的門限
ignore_nice_load:該參數的值是0或者1,如果是0,則統計cpu使用率時會統計所有cpu,如果被設置成1,則運行“nice”值的cpu將不會被統計到cpu使用率。
smapling_down_factor:該值控制當cpu運行在高主頻時的降頻行為,當設置成1(缺省值),則在調頻時會重新評估cpu使用率,當設置成大于1的值(如100),在高負載時其和輪詢時間間隔的乘積將作為查詢負載的間隔,這用于減少cpu開銷,讓cpu更多的停留在較高主頻。
interactive:其設計的目標是對低延遲的使用場景的響應。其調頻策略類似“ondemand”,但是設置的參數值和“ondemand”是有區別的,主要來說就是升頻率快,降頻慢。
查看當前CPU頻率:
/sys/devices/system/cpu/cpu0/cpufreq # catscaling_cur_freq
600000
- root@localhost:/sys/devices/system/cpu/cpufreq# lscpu
- Architecture: aarch64
- Byte Order: Little Endian
- CPU(s): 2
- On-line CPU(s) list: 0,1
- Thread(s) per core:1
- Core(s) per socket:2
- Socket(s): 1
- NUMA node(s): 1
- Vendor ID: ARM
- Model: 3
- Model name: Cortex-A72
- Stepping: r0p3
- CPU max MHz: 1500.0000
- CPU min MHz: 300.0000
- BogoMIPS: 50.00
- L1d cache: unknown size
- L1i cache: unknown size
- L2 cache: unknown size
- NUMA node0 CPU(s): 0,1
- Flags: fp asimd evtstrm crc32 cpuid
如果想使用其它策略,以高性能模式為例,返回根目率,可以進行如下設置,root@forlinx:/# systemctl disable ondemand.service
root@forlinx:/# apt-get install cpufrequtils
修改
root@forlinx:/# vi /etc/default/cpufrequtils
添加
GOVERNOR="performance"
重啟測試
root@forlinx:/# cat /sys/devices/system/cpu/cpu0/cpufreq/scaling_governor
performance
實際過程cpu1、cpu2、cpu3會同時改變。
— CPU默認調度策略
策略初始化注冊完之后,會開一個定時器,周期檢測系統負載變化來動態調節頻率,流程如下:
cpufreq_interactive_timer -> //timer會被定期執行計算當前系統負載
wake_up_process(speedchange_task) -> //喚醒負載計算線程
cpufreq_interactive_speedchange_task ->
__cpufreq_driver_target ->
cpufreq_driver->target ->
cpufreq_target -> rockchip-cpufreq.c
cpufreq_frequency_table_target //設置的target freq要在policy的運行范圍內
dvfs_clk_set_rate->
clk_dvfs_node->vd->vd_dvfs_target ->
dvfs_target ->
dvfs_get_limit_rate//這里會判斷溫度的litmit值(temp_limit_rate變量)
clk_set_rate
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
米爾科技
+關注
關注
5文章
227瀏覽量
20999 -
MYD-J1028X
+關注
關注
1文章
16瀏覽量
283
發布評論請先 登錄
相關推薦
ST×米爾STM32MP25x線下培訓會倒計時12天
STM32MP257D是ST推出的搭載了雙核Cortex-A35@1.5GHz和Cortex-M33@400MHz的微處理器。米爾電子基于STM32MP257D推出了MYD-LD25X

人臉疲勞檢測應用-米爾基于RK3576核心板/開發板
本文將介紹基于米爾電子MYD-LR3576開發板(米爾基于瑞芯微RK3576開發板)的人臉疲勞檢測方案測試。
如何用OpenCV進行手勢識別--基于米爾全志T527開發板
本文將介紹基于米爾電子MYD-LT527開發板(米爾基于全志T527開發板)的OpenCV手勢識別方案測試。摘自優秀創作者-小火苗
【米爾-Xilinx XC7A100T FPGA開發板試用】測試一
感謝米爾電子和電子發燒友提供的米爾-Xilinx XC7A100T FPGA開發板。
MYD-J7A100T用的 FPGA 為 XILINX
發表于 12-08 08:48
ST×米爾STM32MP25x線下培訓會
STM32MP257D是ST推出的搭載了雙核Cortex-A35@1.5GHz和Cortex-M33@400MHz的微處理器。米爾電子基于STM32MP257D推出了MYD-LD25X
追加名額丨米爾瑞芯微RK3576開發板有獎試用
米爾與瑞芯微合作發布的新品基于瑞芯微RK3576應用處理器的MYD-LR3576開發板免費試用活動加碼啦~~
【米爾-Xilinx XC7A100T FPGA開發板試用】+01.開箱(zmj)
【米爾-Xilinx XC7A100T FPGA開發板試用】+01.開箱(zmj)
1.感謝
感謝米爾電子和電子發燒友提供的此次
發表于 11-12 15:45
有獎丨米爾 瑞芯微RK3576開發板免費試用
米爾與瑞芯微合作發布的新品基于瑞芯微RK3576應用處理器的MYD-LR3576開發板免費試用活動來啦~~
基于OPENCV的相機捕捉視頻進行人臉檢測--米爾NXP i.MX93開發板
本文將介紹基于米爾電子MYD-LMX93開發板(米爾基于NXPi.MX93開發板)的基于OpenCV的人臉檢測方案測試。OpenCV提供了一
米爾基于NXP iMX.93開發板的M33處理器應用開發筆記
資源MYD-LMX9X開發板(米爾基于NXPiMX.93開發板)3.軟件資源Windows7及以上版本軟件:IAREmbeddedWorkbench4.板載固件調試
米爾NXP i.MX 93開發板的Qt開發指南
1.概述Qt是一個跨平臺的圖形應用開發框架,被應用在不同尺寸設備和平臺上,同時提供不同版權版本供用戶選擇。米爾NXPi.MX93開發板(MYD-LMX9X
ROS系統的智能車開發-基于米爾芯馳MYD-JD9X開發板
本篇測評由電子工程世界的優秀測評者“mameng”提供。本文將介紹基于米爾電子MYD-JD9X開發板的ROS系統智能車開發。目前實現ROS的方式主要有兩種:Ubuntu系統+ROS;U





 工商網監
工商網監
評論