") 中國自動駕駛仿真測試:問題何在?如何解決?
中國自動駕駛仿真測試:問題何在?如何解決?
自動駕駛汽車在真正商業(yè)化應用前,需要經(jīng)歷大量的道路測試才能達到商用要求。采用路測來優(yōu)化自動駕駛算法耗費的時間和成本太高,旦開放道路測試仍受到法規(guī)限制,極端交通條件和場景復現(xiàn)困難,測試安全存在隱患。世界各國交通環(huán)境也大相徑庭,形成全球通用的產(chǎn)業(yè)鏈體系比較困難。以上種種問題使得自動駕駛產(chǎn)業(yè)鏈的全球化發(fā)展和技術(shù)交流面臨眾多實際問題。因此,基于場景庫的仿真測試是解決自動駕駛研發(fā)測試挑戰(zhàn)的主要路線。
為提升智能網(wǎng)聯(lián)汽車的測試驗證效率,有企業(yè)和智能網(wǎng)聯(lián)示范區(qū)開展了路測與虛擬仿真相結(jié)合的測試模式。我國也正在鼓勵探索自動駕駛汽車與數(shù)字智能化道路有機融合的仿真技術(shù)。仿真技術(shù)在虛擬環(huán)境中模擬智能交通運行,為智能交通調(diào)度運營管理提供決策依據(jù),助力智慧城市的建設。
報告核心內(nèi)容
一、自動駕駛仿真測試的意義
自動駕駛汽車在真正商業(yè)化應用前,需要經(jīng)歷大量的道路測試才能達到商用要求。但作為新興事物,自動駕駛汽車仍面臨著大量問題需要克服,如道路測試的時間樣本、各國對于自動駕駛的法律容忍度、極端場景及危險工況的測試安全性、各國道路交通環(huán)境及習慣不同等問題,都給自動駕駛系統(tǒng)研發(fā)測試帶來諸多困難。
目前基于場景庫的仿真測試是解決自動駕駛路側(cè)數(shù)據(jù)匱乏的重要路線。仿真測試主要通過構(gòu)建虛擬場景庫,實現(xiàn)自動駕駛感知、決策規(guī)劃、控制等算法的閉環(huán)仿真測試,滿足自動駕駛測試的要求。場景庫是自動駕駛仿真測試的基礎(chǔ),場景庫對現(xiàn)實世界的覆蓋率越高,仿真測試結(jié)果越真實。而且自動駕駛汽車研發(fā)的不同階段對于場景庫的要求也不同,需要場景庫實現(xiàn)不同的測試功能。
在自動駕駛的開發(fā)流程中,純模型仿真-軟件在環(huán)仿真-半實物仿真-封閉場地道路測試-開放道路測試的開放流程是最經(jīng)濟、高效的開發(fā)流程。目前,自動駕駛仿真已經(jīng)被行業(yè)廣泛接受。
二、國內(nèi)外自動駕駛仿真測試發(fā)展現(xiàn)狀
政策法規(guī)現(xiàn)狀方面,在世界范圍內(nèi),眾多國家針對自動駕駛及相關(guān)功能有著不同的政策策略及法規(guī)專注度。
歐盟認為以協(xié)作、網(wǎng)聯(lián)、自動為特征的出行模式是未來的交通系統(tǒng)發(fā)展趨勢,但在智能網(wǎng)聯(lián)汽車整體策略上態(tài)度相對保守。美國發(fā)展智能網(wǎng)聯(lián)汽車擁有雄厚的產(chǎn)業(yè)優(yōu)勢,參與自動駕駛研發(fā)的企業(yè)涵蓋芯片技術(shù)、算法開發(fā)、系統(tǒng)集成、電信運營、仿真測試、電子設備、整車制造及信息服務等領(lǐng)域,且全部為本土及國際高精尖企業(yè)及研究機構(gòu)。日本方面,政府非常重視智能網(wǎng)聯(lián)汽車的研發(fā)與應用,并認為加快L3、L4級別自動駕駛汽車的研發(fā)需要國家級場景庫協(xié)助日本主導國際話語權(quán)。
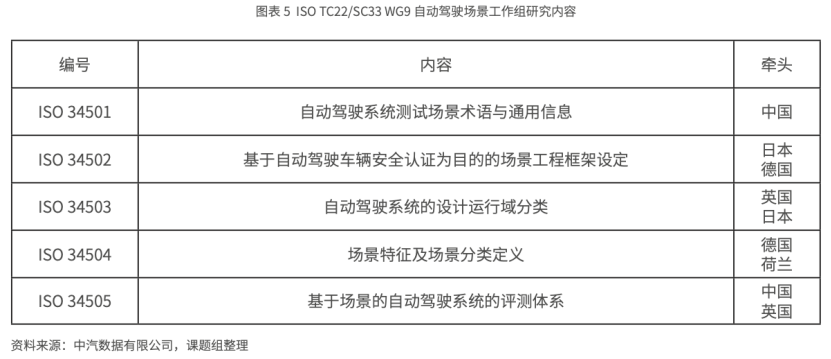
標準發(fā)展現(xiàn)狀方面,國際標準化組織ISO于2018年正式成立TC22/SC33 WG9自動駕駛場景工作組,制定自動駕駛測試場景相關(guān)標準。此工作組由中國牽頭,汽車標準委員會秘書處王兆作為召集人,這是我國在ISO/TC22范疇內(nèi)首次承擔國際標準工作組召集人職責,是我國在汽車國際標準化方面邁出的重要一步。
仿真測試應用現(xiàn)狀方面,目前自動駕駛仿真市場參與主體主要包括:科技公司、車企、自動駕駛解決方案、仿真軟件企業(yè)、高校及科研機構(gòu)、智能網(wǎng)聯(lián)測試示范區(qū)。由于每個市場主體在自動駕駛仿真方面的技術(shù)基礎(chǔ)不同,因此在推動自動駕駛仿真方面的研發(fā)及合作方式呈現(xiàn)不同模式。
三、自動駕駛仿真測試平臺環(huán)境
對自動駕駛算法的開發(fā)來說,測試驗證手段必不可少。引入虛擬仿真平臺進行自動駕駛測試的核心目的,正是為了彌補實車測試的不足,提高自動駕駛汽車的安全性并接生測試時間和成本,快速推動自動駕駛汽車落地。
因此,自動駕駛方正面向的主要客戶是有自動駕駛開發(fā)需求的汽車廠商、算法公司以及各類汽車測試場,從滿足客戶使用的需求來講,自動駕駛仿真測試平臺至少應該具備以下功能:滿足自動駕駛感知、決策規(guī)劃、控制全棧算法的閉環(huán)反正測試;滿足汽車V字開發(fā)流程;加速自動駕駛算法迭代升級。
仿真測試平臺技術(shù)架構(gòu)與能力包括:虛擬場景構(gòu)建、感知系統(tǒng)仿真、車輛動力學仿真、云加速仿真。
仿真測試平臺的核心功能包括:超高還原度的仿真場景、利用路采數(shù)據(jù)生成交互性強和還原度高的交通場景、云端大規(guī)模并行加速提升仿真測試效率。
四、場景庫體系建立與開放
自動駕駛場景庫是智能網(wǎng)聯(lián)汽車研發(fā)與測試的基礎(chǔ)數(shù)據(jù)資源,是評價智能網(wǎng)聯(lián)汽車功能安全的重要數(shù)據(jù)庫,是定義自動駕駛汽車等級的關(guān)鍵數(shù)據(jù)依據(jù)。自動駕駛測試場景數(shù)據(jù)庫主要通過虛擬仿真環(huán)境及工具鏈進行復現(xiàn),建設虛擬場景數(shù)據(jù)庫是連接場景數(shù)據(jù)與場景應用的關(guān)鍵橋梁。
道路測試轉(zhuǎn)發(fā)成仿真測試場景,需要經(jīng)歷四個步驟:場景理解、特征提取、場景聚類、場景生成。
國內(nèi)目前有中汽數(shù)據(jù)有限公司、中國汽車工程研究院股份有限公司、騰訊、百度等建立了自己的場景庫。
場景庫建設處于各自為戰(zhàn)的狀態(tài)。目前在自動駕駛仿真場景庫建設方面,企業(yè)都投入大量資金與人才建立自己的場景庫。由于廠商之間缺乏有效合作,場景數(shù)據(jù)格式不一致,很難形成全國統(tǒng)一的場景庫。場景庫不統(tǒng)一也導致了自動駕駛仿真測試評價、認證體系很難建立,阻礙了我國自動駕駛汽車的發(fā)展。

五、自動駕駛測試評價體系
現(xiàn)實世界的汽車在駕駛過程中會遇到各種駕駛情景,人類經(jīng)過不斷學習與積累,可以很快掌握應對不同駕駛情景的能力,驗證人類是否具備這種能力的辦法是駕照考試。同樣,自動駕駛汽車商用前也需要通過一系列方法評價其“駕駛能力”,如駕駛安全性及舒適性、駕駛協(xié)調(diào)性等。
由于事件和成本的限制,自動駕駛車輛無法進行重返的道路測試,因此當前普通共識是基于虛擬仿真的測試評價,充分驗證自動駕駛汽車在自然駕駛場景、標準法規(guī)測試場景、危險工況場景、參數(shù)重組場景下的表現(xiàn)。利用仿真環(huán)境的真實性、可復現(xiàn)性、交互性、無限性、自動化等特點,自動駕駛系統(tǒng)可以得到客觀的測試評價。
六、中國自動駕駛仿真測試展望
目前自動駕駛仿真測試已初步形成完整的產(chǎn)業(yè)鏈體系,形成了科技公司、自動駕駛解決方案商、仿真軟件企業(yè)為主的上游仿真軟件提供商,以車企、自動駕駛測試機構(gòu)為主的仿真軟件下游應用商。從產(chǎn)業(yè)鏈角度分析,目前自動駕駛仿真測試還存在諸多問題。
首先,仿真場景庫建設與合作機制有待完善。
(1)場景庫建設效率低、費用高。
(2)場景庫規(guī)模不夠大,多樣性、覆蓋性、可擴展性不強。
(3)場景有效性有待提高。
(4)測試場景中的測試真值及評估體系。
(5)場景庫建立缺乏合作,資源重復性投入大。
其次,自動駕駛仿真測試評價體系缺乏規(guī)范。由于不同仿真軟件系統(tǒng)架構(gòu)及場景庫構(gòu)建方法的不同,導致很難建立統(tǒng)一規(guī)范的仿真測試評價體系。
測試場景庫作為自動駕駛仿真的基礎(chǔ),是仿真建設的核心內(nèi)容。針對目前場景庫領(lǐng)域面臨的問題,建議加強一下方面的工作。
第一,將仿真技術(shù)應用與交通行為管理和監(jiān)督;第二,建立全國范圍的基礎(chǔ)場景庫,同時鼓勵發(fā)展個性化場景;第三,探索自動駕駛汽車與智慧交通、智慧城市有機融合的仿真技術(shù);第四,建立仿真測試、認真、審查機制;第五,鼓勵混行交通、人機交互等方面的仿真測試研究;第六,推動仿真技術(shù)的國產(chǎn)化。
-
仿真
+關(guān)注
關(guān)注
50文章
4073瀏覽量
133555 -
自動駕駛
+關(guān)注
關(guān)注
784文章
13786瀏覽量
166403
發(fā)布評論請先 登錄
相關(guān)推薦
一文聊聊自動駕駛測試技術(shù)的挑戰(zhàn)與創(chuàng)新


自動駕駛HiL測試方案案例分析--ADS HiL測試系統(tǒng)#ADAS #自動駕駛 #VTHiL




美國擬禁止自動駕駛汽車使用中國軟件
FPGA在自動駕駛領(lǐng)域有哪些優(yōu)勢?
FPGA在自動駕駛領(lǐng)域有哪些應用?
自動駕駛仿真測試實踐:高精地圖仿真

小馬智行首批開啟北京南站自動駕駛測試

未來已來,多傳感器融合感知是自動駕駛破局的關(guān)鍵
鑒源實驗室|自動駕駛仿真測試技術(shù)分析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論