") ROS2概述和實踐入門
ROS2概述和實踐入門
ROS可以說是?前機器?相關開源社區(qū)最流?的項?之?,它是?個易?且完備的機器?開發(fā)框架、?態(tài)乃?社區(qū),海量的機器?開源項?(涵蓋感知、規(guī)劃、控制、定位、SLAM和建圖、可視化等?乎所有機器?領域)均使?ROS作為基礎。
以?動駕駛汽?為代表的新的機器?應?場景對于中間層和開發(fā)框架在實時性、可靠性、伸縮性、跨平臺可移植等??提出了?量新的需求,ROS 顯然不能滿?這些需求,ROS2因此產?,在經歷了若?年的迭代后,ROS2項??前已經相對完備和穩(wěn)定,對于我們開發(fā)者??,是時候擁抱ROS2了。
01為什么轉向ROS
ROS?2007年發(fā)布以來,為機器?社區(qū)提供了?套相對完善的中間層、?具、軟件乃?通?的接?和標準,可以說,憑借ROS,機器??業(yè)領域的開發(fā)者能夠快速開發(fā)系統(tǒng)原型并做測試和驗證。?動駕駛本質上是機器?研究的?個應?領域,在產品原型快速開發(fā)的過程中也通常會采?ROS。
如果說ROS1為科研和原型開發(fā)提供了很好的?態(tài)的話,那么ROS2就是?于實際產品的部署環(huán)境的開發(fā)架構和相應?具鏈。
02ROS1的天然缺陷ROS1項?的初衷是為了給科研機器?Willow Garage PR2提供?個開發(fā)環(huán)境和相應的?具,為了讓這套軟件在更多的機器?上運?,ROS為機器?開發(fā)構建了應?層的抽象和通?的消息接?,最終在機器?社區(qū)中?為使?并發(fā)展為?前最流?的機器?軟件?態(tài)體系之?。然?,ROS1研發(fā)的初衷就注定了該架構存在以下缺陷:
·?實時性(real-time)
·嵌?式設備不友好
·對于?絡通信的重依賴(需要?帶寬且穩(wěn)定的?絡連接)
·多?于學術應?
·超?的靈活性帶來的不規(guī)范的編程模式
·原?的ROS僅?持單機器?
然?如今ROS已在?量?業(yè)領域的應?,包括科研機器?、?業(yè)機器?、輪式機器?、?動駕駛汽?乃?航天??駕駛設備,其原來的功能設計已經不能滿?海量應?對于某些性能(如實時性、安全性、嵌?式移植等)的需求,ROS2即在這樣的背景下被設計和開發(fā)。
03ROS2相較于ROS1的提升和改進
相較于ROS1,ROS2在設計之初就考慮了在產品環(huán)境下?臨的?些挑戰(zhàn),具體來說,ROS2采?(或者計劃采?)以下策略以提升其在產品環(huán)境的適?度:
·?持多機器?
·對?型嵌?式設備和微控制器的?持
·實時系統(tǒng):?持實時控制,包括進程間和機器間通信的實時性
·?持?理想?絡環(huán)境:在低質量?延遲等?絡環(huán)境下系統(tǒng)仍然能夠?作
·對產品環(huán)境的?持的能力
·規(guī)范的編程模型以?持基于ROS的?規(guī)模?的構建、開發(fā)和部署
04ROS2中的DDS中間層
ROS1的核?是?個基于master中?節(jié)點的匿名發(fā)布-訂閱通信中間層,相?之下,ROS2采?基于RTSP(Real-Time Publish-Subscribe)協(xié)議的DDS作為中間層,DDS(Data-Distribution Service)是?種?于實時和嵌?式系統(tǒng)發(fā)布-訂閱式通信的?業(yè)標準,這種點到點的通信模式類似于ROS1的中間層,但是DDS不需要像ROS1那樣借由master節(jié)點來完成兩個節(jié)點間通信,這使得系統(tǒng)更加容錯和靈活,DDS 被?泛應?于關鍵系統(tǒng)中,包括戰(zhàn)艦、?型基礎設施(如?電站)、?融系統(tǒng)、空間系統(tǒng)、航空系統(tǒng)等場景,這些?例也證實了DDS的可靠性。
多個?商提供多種DDS實現(xiàn),?般來說DDS的底層通信機制基于UDP協(xié)議或者共享內存機制(當然也有 ?商提供基于TCP的DDS實現(xiàn)),?ROS2?持多種DDS實現(xiàn),??可以根據(jù)實際情況選擇DDS中間層, ?前來說ROS2 Foxy完整?持以下DDS中間層:
·eProsima的Fast RTPS(當前ROS2版本默認的DDS實現(xiàn))
·RTI的Connext DDS
·Eclipse Cyclone DDS
了解更多DDS相關背景,可以參考這篇?章:
https://design.ros2.org/articles/ros_on_dds.html
ROS2的內部架構:
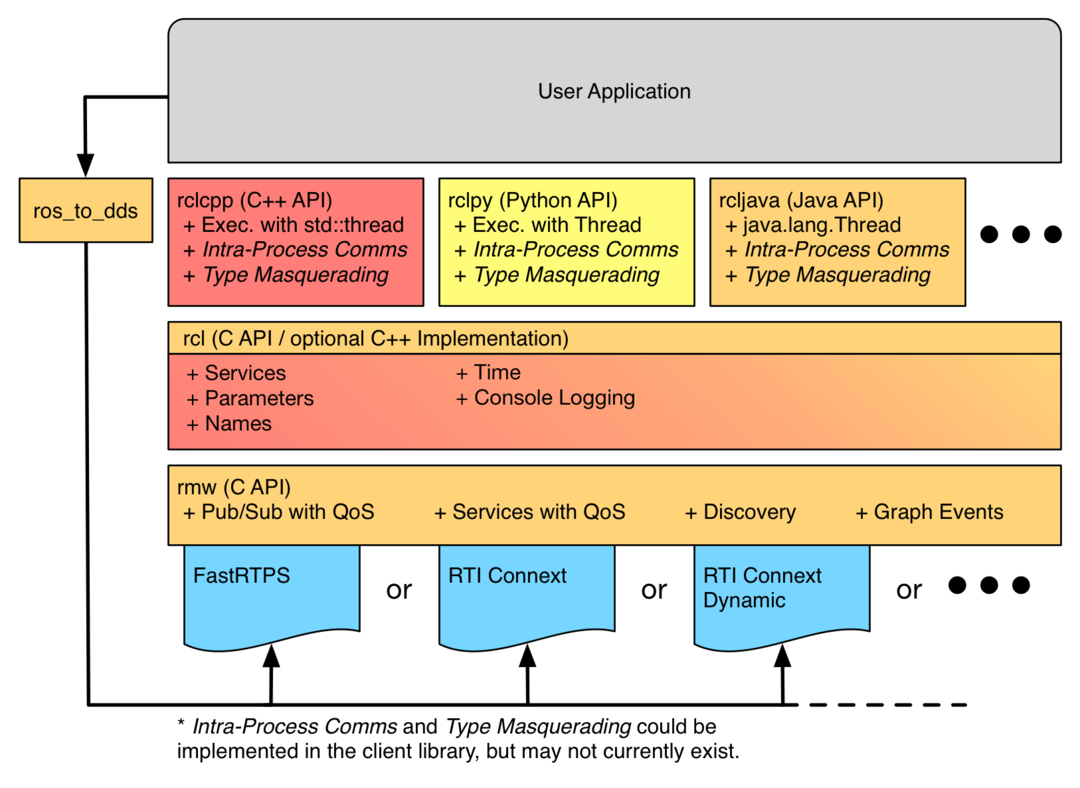
點擊可查看大圖
ROS2的內部接?主要包括兩個層:
·rmw (ros middleware interface): 相對底層的接?層,直接和DDS交互,C語?實現(xiàn)
·rcl (ros cliend libraries): 對rmw相對?層的抽象,c/c++實現(xiàn)
此外上圖中還有?個ros_to_dds組件,該組件主要為??直接訪問DDS層提供接?。
更多關于rmw和rcl等中間層的實現(xiàn)機制以及ROS msg,DSS idl?件和python、c++和C上的類(或者結 構體)的轉換可以參考ROS2官??檔:
https://docs.ros.org/en/foxy/Concepts/About-Internal-Interfaces.html
05ROS2中的QoS策略ROS2中引?了Quality of Service, QoS(服務質量)的策略?于配置節(jié)點間通信,進?提升了ROS2適應于不同應?場景的靈活性。ROS1只?持基于TCP的通信,通過配置QoS,ROS2可以表現(xiàn)出TCP的可靠性,也可以表現(xiàn)出UDP那樣的?實時性。??可以通過選擇不同的QoS配置?件以實現(xiàn)不同的通信表現(xiàn),QoS配置?件為策略的集合,ROS2提供了預設的QoS配置?件,如下所?:
·發(fā)布-訂閱機制的QoS設定
·服務 (Service) 的QoS設定
·傳感器數(shù)據(jù)的QoS設定
·參數(shù)的QoS設定
·DDS中間層默認的QoS設定
06ROS2的安裝和開發(fā)環(huán)境準備
ROS2?前?乎每半年會release?個版本,不同的版本會有對應的代號(類似與ROS1中的Kinetic, Melodic和Noetic等版本代號),以下是ROS2的?些歷史版本:
·Crystal: 2018年12?
·Dashing: 2019年5?底
·Eloquent: 2019年11?
·Foxy: 2020年6?
·Galactic: 2021年5?
我們以最新的Galactic為例,ROS2是跨平臺的架構,同時?持Linux, MacOS和Windows,但是依據(jù)我們在ROS1上開發(fā)的經驗,我依然推薦?家在Linux的Ubuntu發(fā)?版上從事相應的ROS2 Application開發(fā)?作。在Ubuntu上,安裝ROS2可以通過binary安裝或者源代碼編譯安裝,在Ubuntu上,最簡單的安裝?式是通過Debian packages安裝(也就是apt安裝),我們以此為例,在Ubuntu 20.04上使?apt 安裝ROS2的Galactic版本。
07ROS2在Ubuntu下的安裝在你的Ubuntu 20.04系統(tǒng)中,配置ROS2的apt源:
sudo apt update && sudo apt install curl gnupg lsb-release sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/s echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-k
更新apt索引:
sudo apt update
使?apt安裝完整的ROS2:
sudo apt install ros-galactic-desktop
安裝完成后,在~/.bashrc?件中添加ros2的環(huán)境變量:
echo"source/opt/ros/galactic/setup.bash">>~/.bashrc
簡單地驗證?下安裝情況,新建?個terminal,運?demo的talker:
ros2 run demo_nodes_cpp talker
在另?個terminal中,運?listener:
ros2 run demo_nodes_py listener
可以看到,?個類似于ROS1的Publisher-Subscriber通信demo就運?起來了:
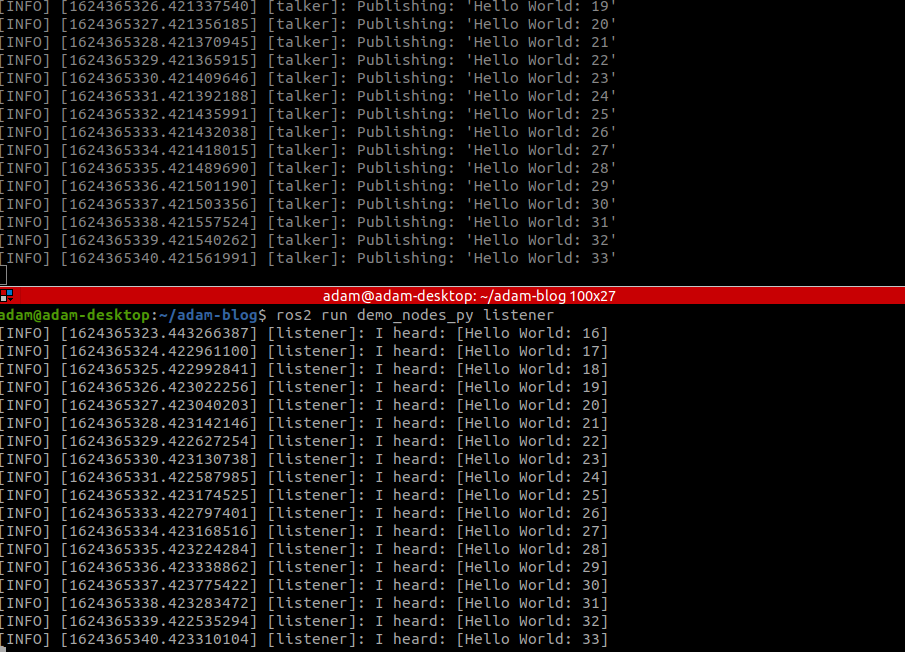
點擊可查看大圖
不難發(fā)現(xiàn),ROS2并不需要像ROS1那樣啟動roscore(即master節(jié)點),ROS2這種去中?化的策略能讓其適應更多?業(yè)應?和產品級應?場景的需求。
NOTE:ROS1和ROS2可以并存于同?臺電腦,你只需要source不同的setup.bash即可完成環(huán)境的選擇。
08ROS2的基本工具和命令和ROS1?樣,ROS2也提供了?量的開發(fā)調試?具,如Rviz, Rqt等?具均已經可以在ROS2中使?,運行rqt,可以看到我們剛剛運?的兩個demo節(jié)點:
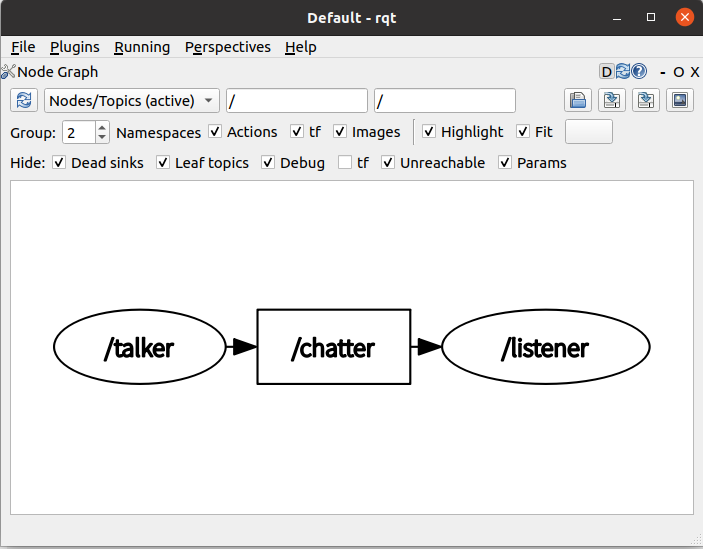
點擊可查看大圖
運?rviz2可以啟動ROS2環(huán)境下的rviz軟件。
同時,ROS2也提供類似于ROS1的命令?指令,指令和ROS1略有區(qū)別:
·ros2 node: 輸出node相關信息
·ros2 topic: topic相關指令,包括list,hz,echo等
·ros2 service:service相關指令,如list,call,type等
·ros2 bag: rosbag相關指令, 錄包,播包,打印數(shù)據(jù)包信息等
·ros2 bag:package相關指令
·ros2 param: 參數(shù)相關
·ros2 launch:運?launch?件
·ros2 run:運?單個節(jié)點
完整的ros2命令如下所?:
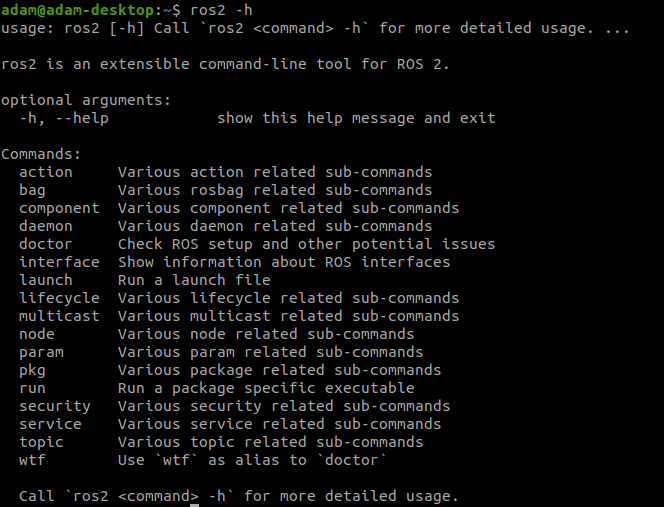
絕?多數(shù)指令基本是將ros1中的rosxxxx拆分成了ros2 xxxx。
審核編輯 :李倩
-
機器人
+關注
關注
212文章
28910瀏覽量
209649 -
嵌人式
+關注
關注
0文章
10瀏覽量
7531 -
ROS
+關注
關注
1文章
281瀏覽量
17249
原文標題:擁抱ROS2系列:ROS2概述和實踐入門
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
【書籍評測活動NO.58】ROS 2智能機器人開發(fā)實踐
如何將python文件導入到ROS系統(tǒng)中

使用myCobot 280機械臂結合ROS2系統(tǒng)搭建機械分揀站

在Mac上使用Docker構建noVNC環(huán)境并運行MyCobot
#新年新氣象,大家新年快樂!#AIGC入門及鴻蒙入門
AIGC入門及鴻蒙入門
ROSCon China 2024 | RDK第一本教材來了!地瓜機器人與古月居發(fā)布新書《ROS 2智能機器人開發(fā)實踐》

ROSCon China 2024 | RDK第一本教材來了!地瓜機器人與古月居發(fā)布新書《ROS 2智能機器人開發(fā)實踐》

ROS讓機器人開發(fā)更便捷,基于RK3568J+Debian系統(tǒng)發(fā)布!
如何在ROS中調用.so文件
ZMC900E控制器之ROS2環(huán)境安裝指南

SLAMWARE ROS SDK的基礎架構、部署方法和應用示例介紹

EtherCAT運動控制器在ROS上的應用(下)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論