 基于線段的激光雷達單目曲面重建
基于線段的激光雷達單目曲面重建
運動結構(SfM)在缺乏合適的視覺特征的環境中往往無法估計出正確的位姿。在這種情況下,最終的三維網格質量(取決于估計的準確性)會降低。解決這個問題的一種方法是將單目相機和激光雷達的數據結合起來。這種方法能夠捕捉到環境中精細的細節和紋理,同時仍能準確地表示無特征的對象。然而由于這兩種傳感器的根本特性不同,融合這兩種傳感器模式是具有挑戰性的。相比直接融合圖像特征和雷達數據點,本文提出借助在雷達掃描和圖像數據中檢測出共同的幾何特征,以此在更高級別的空間中處理來自兩個傳感器的數據。特別是在用BA優化位姿之前,找到雷達掃描提取的三維線束與圖像中檢測到的二維線束之間的對應關系。作者還利用檢測出和優化的線段來提高最終網格的質量,并在最新的公開數據集上測試了該方法,將三維網格的完整性和準確性與使用測量級3d掃描儀得到的真值進行比較。結果表明,該方法的所得到的結果與最先進的激光雷達測量相差無幾,并不需要高精度的真值位姿估計。 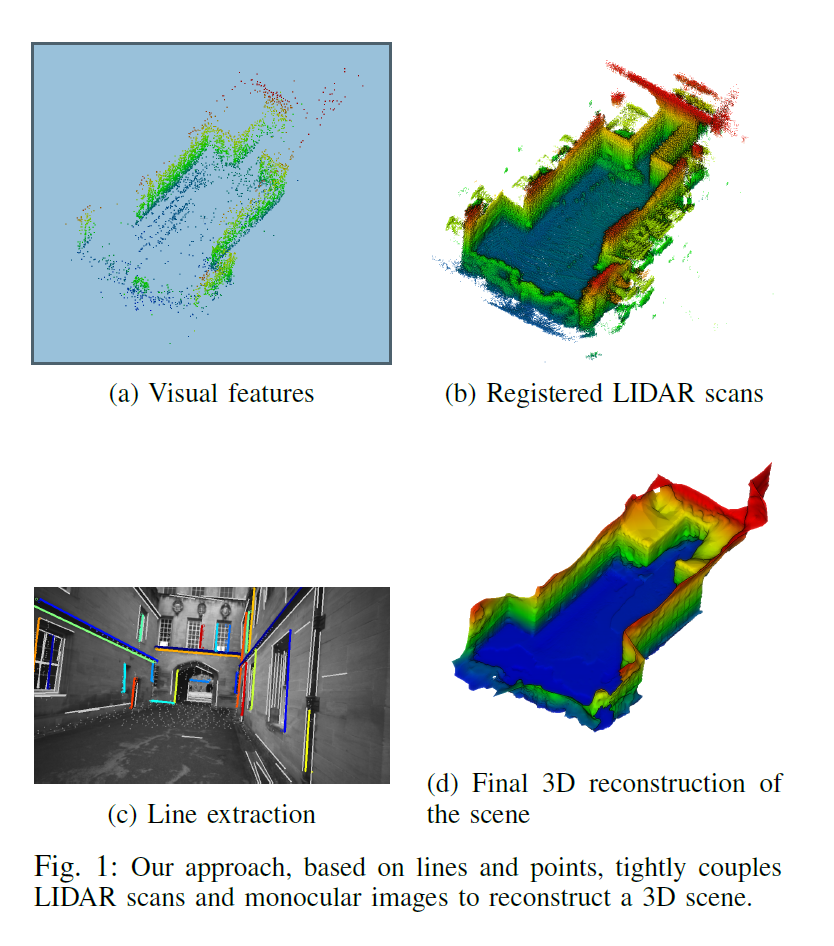 圖1所示為基于點線特征將雷達掃描數據和單目圖像緊密耦合以完成三維場景重建的方法
圖1所示為基于點線特征將雷達掃描數據和單目圖像緊密耦合以完成三維場景重建的方法 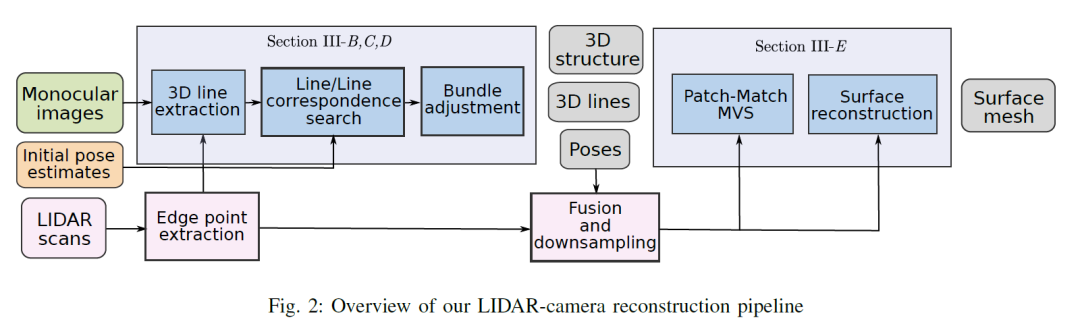 圖2:該方法的流程概述
圖2:該方法的流程概述 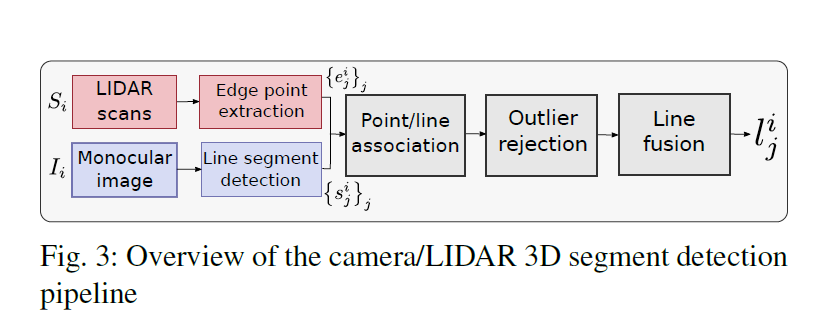 圖3:雷達和相機3維線段檢測流程概述。
圖3:雷達和相機3維線段檢測流程概述。 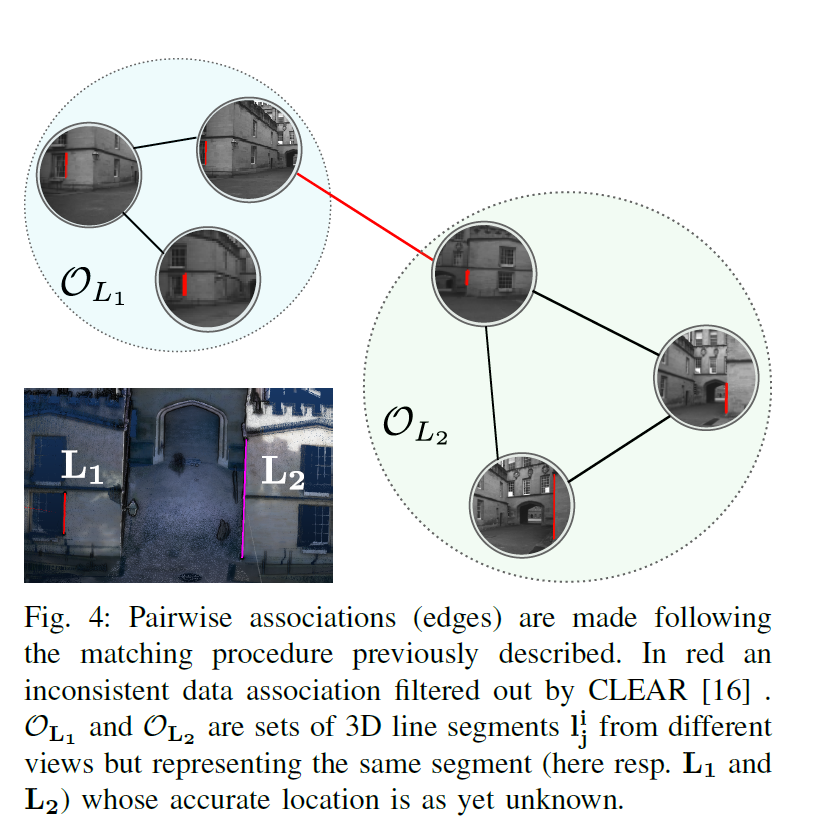 圖4:成對關聯的邊緣是按照文中描述的匹配過程進行的。紅色表示過濾掉的不一致關聯數據,OL1和Ol2是不同視圖的3d線段的集合,但代表的是同一個線段,其準確位置尚不確定。
圖4:成對關聯的邊緣是按照文中描述的匹配過程進行的。紅色表示過濾掉的不一致關聯數據,OL1和Ol2是不同視圖的3d線段的集合,但代表的是同一個線段,其準確位置尚不確定。 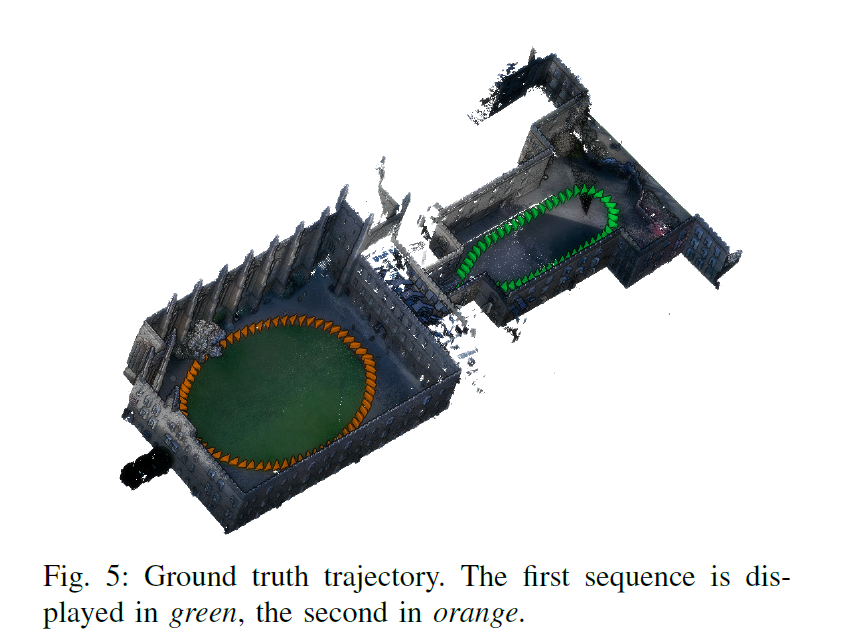 圖5:數據真值的軌跡。綠色為第一個序列,橘色為第二個序列數據。
圖5:數據真值的軌跡。綠色為第一個序列,橘色為第二個序列數據。 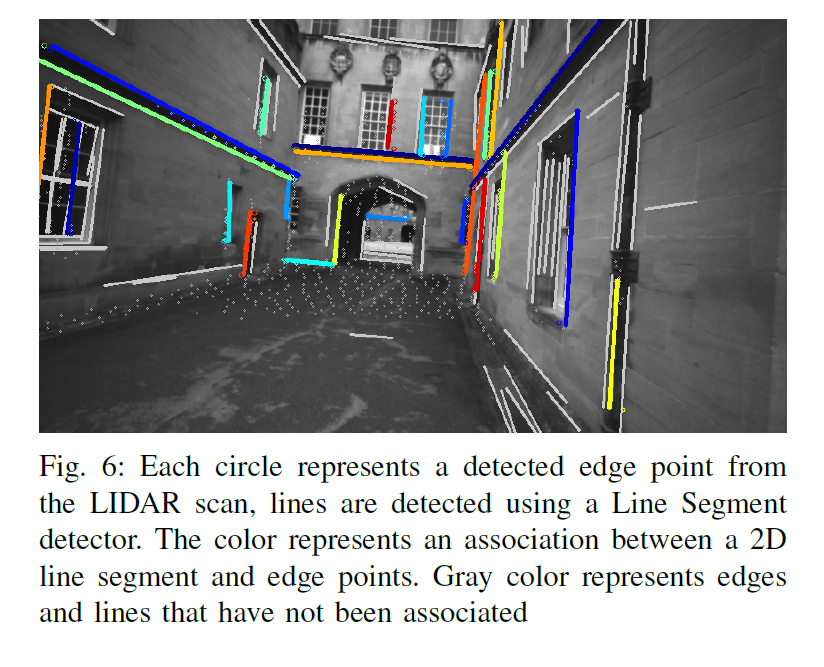 圖6:每個圓代表從雷達中檢測出的邊緣點,線是由線段檢測器檢測出來的。彩色代表一個二維線段與邊緣點之間的關聯,灰色代表未關聯
圖6:每個圓代表從雷達中檢測出的邊緣點,線是由線段檢測器檢測出來的。彩色代表一個二維線段與邊緣點之間的關聯,灰色代表未關聯 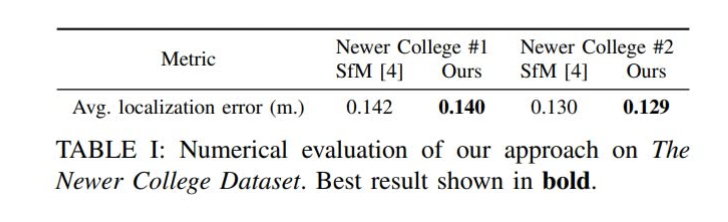 表I 基于Newer College 數據集測試本文方法得到的數值評估結果。最好的結果加粗顯示。
表I 基于Newer College 數據集測試本文方法得到的數值評估結果。最好的結果加粗顯示。 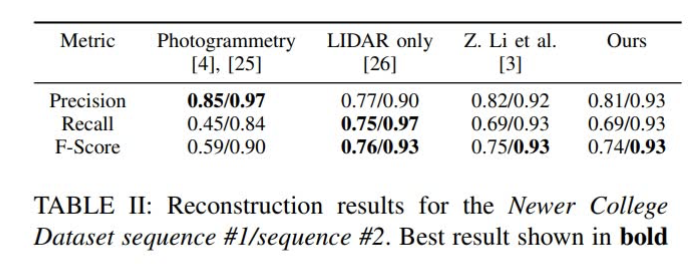 表II 基于Newer College數據集序列1和序列2的重構結果,最好的結果加粗顯示。
表II 基于Newer College數據集序列1和序列2的重構結果,最好的結果加粗顯示。 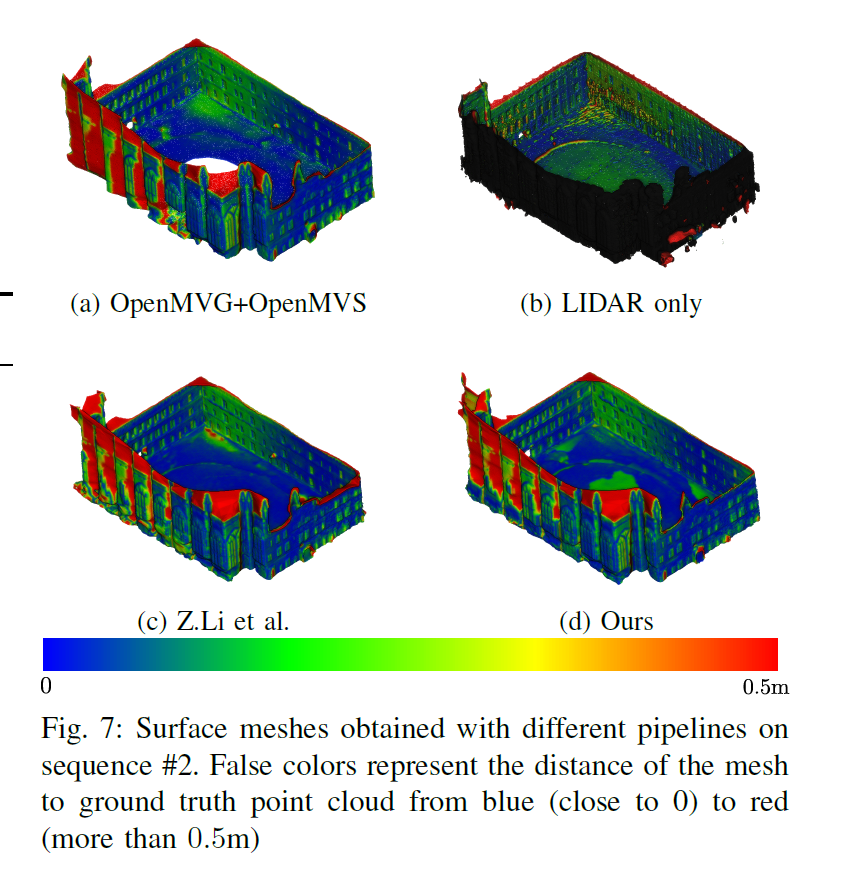 圖7:不同方法在序列2上取得的表面重建網格。失真的顏色代表網格到真實點云之間的距離,圖示為從藍色到紅色。
圖7:不同方法在序列2上取得的表面重建網格。失真的顏色代表網格到真實點云之間的距離,圖示為從藍色到紅色。
-
傳感器
+關注
關注
2550文章
51040瀏覽量
753095 -
圖像數據
+關注
關注
0文章
52瀏覽量
11276 -
激光雷達
+關注
關注
968文章
3969瀏覽量
189830
原文標題:基于線段的激光雷達單目曲面重建(ICRA2021)
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
激光雷達分類以及應用
常見激光雷達種類
激光雷達面臨的機遇與挑戰
消費級激光雷達的起航
北醒固態設計激光雷達
固態設計激光雷達
機器人和激光雷達都不可或缺
TOF激光雷達
最佳防護——激光雷達與安防監控解決方案
激光雷達知多少:從技術上講講未來前景
由iphone12說說激光雷達 FMCW激光雷達 精選資料分享
激光雷達、單目攝像頭、雙目攝像頭原理和優缺點






 工商網監
工商網監
評論