") 簡析Window10安裝ROS2的步驟
簡析Window10安裝ROS2的步驟
個(gè)人建議找個(gè)Linux裝去,這篇文章純屬折騰。。。全看的是官方的文檔。
以下的操作都要管理員的權(quán)限,我可以提前劇透,我應(yīng)該應(yīng)該是沒有安裝上DDS,應(yīng)該是算安裝好了80%的樣子。
在win這里右鍵,使用管理員的權(quán)限
choco install -y vcredist2013 vcredist140
巧克力如何安裝我就不寫了,自己去看看,安裝好以后就執(zhí)行這個(gè)命令就行
安裝好的時(shí)候會(huì)有的日志
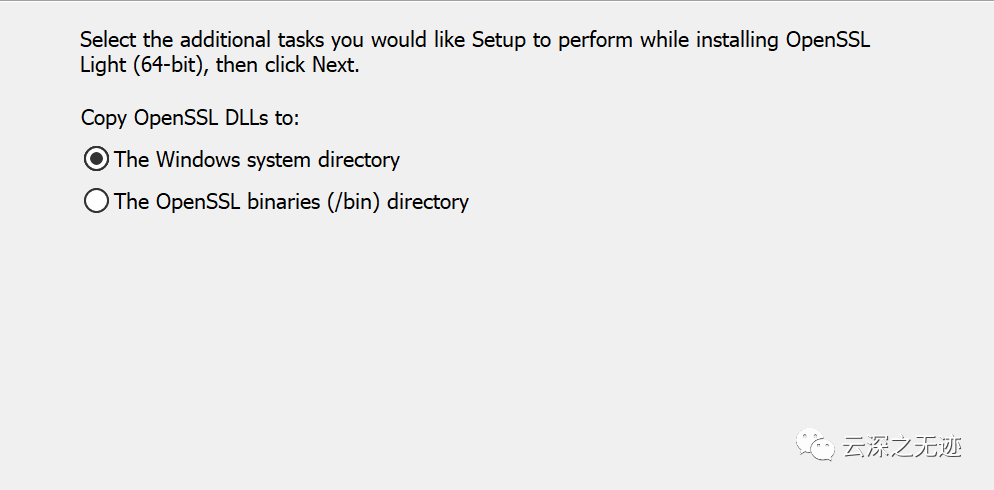
這個(gè)是SSL的安裝,按照我寫的選擇就行
我哪有錢
C:Program FilesOpenSSL-Win64in
可以確定一下你的安裝目錄是不是這個(gè)
是,那你就執(zhí)行我下面的命令就行

輸出
OpenCV也是一個(gè)特別的供應(yīng)的版本,這里就需要你下載一下
https://github.com/ros2/ros2/releases/download/opencv-archives/opencv-3.4.6-vc16.VS2019.zip
解壓到C盤的根目錄下就行
C:opencvx64vc16in
這個(gè)就是在我的電腦上面安裝的路徑
https://github.com/ros2/choco-packages/releases/tag/2022-03-15

這里就是一些需要離線安裝的庫
choco install -y -s C:UsersyunswjDownloads tt asio cunit eigen tinyxml-usestl tinyxml2 bullet
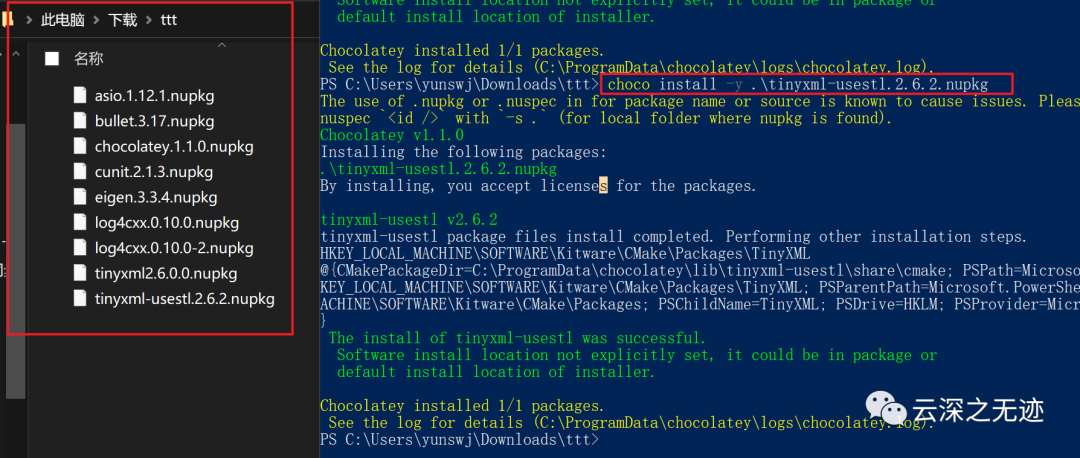
先把要安裝的庫放在一個(gè)目錄下面,然后導(dǎo)航安裝
python -m pip install -U catkin_pkg cryptography empy importlib-metadata lark==1.1.1 lxml matplotlib netifaces numpy opencv-python PyQt5 pillow psutil pycairo pydot pyparsing==2.4.7 pyyaml rosdistro
依賴的庫安裝一下
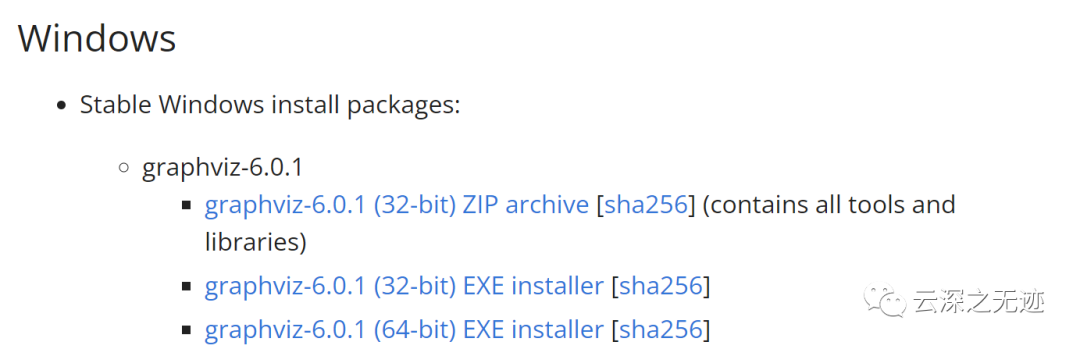
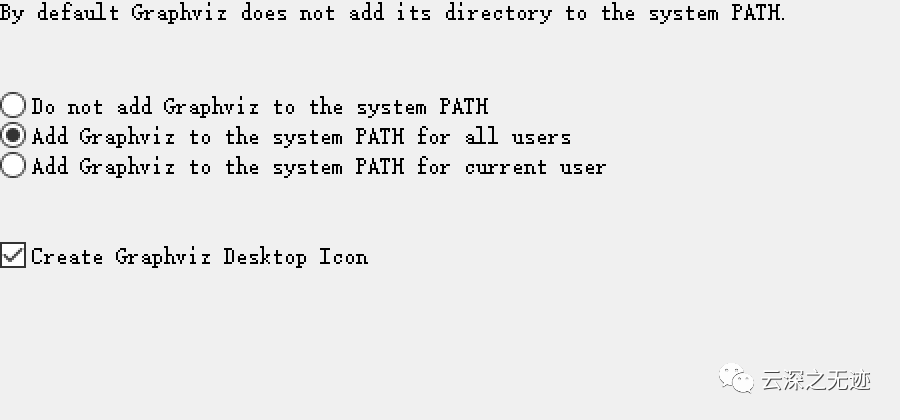
安裝文檔也需要安裝這個(gè)東西
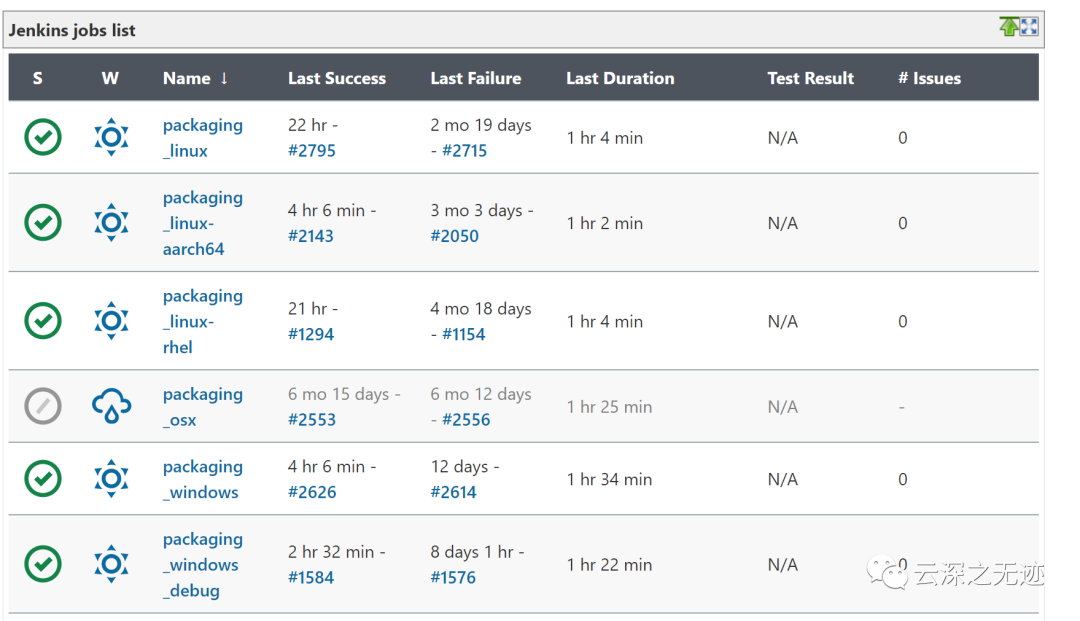

以上就是已經(jīng)編譯好的ROS2
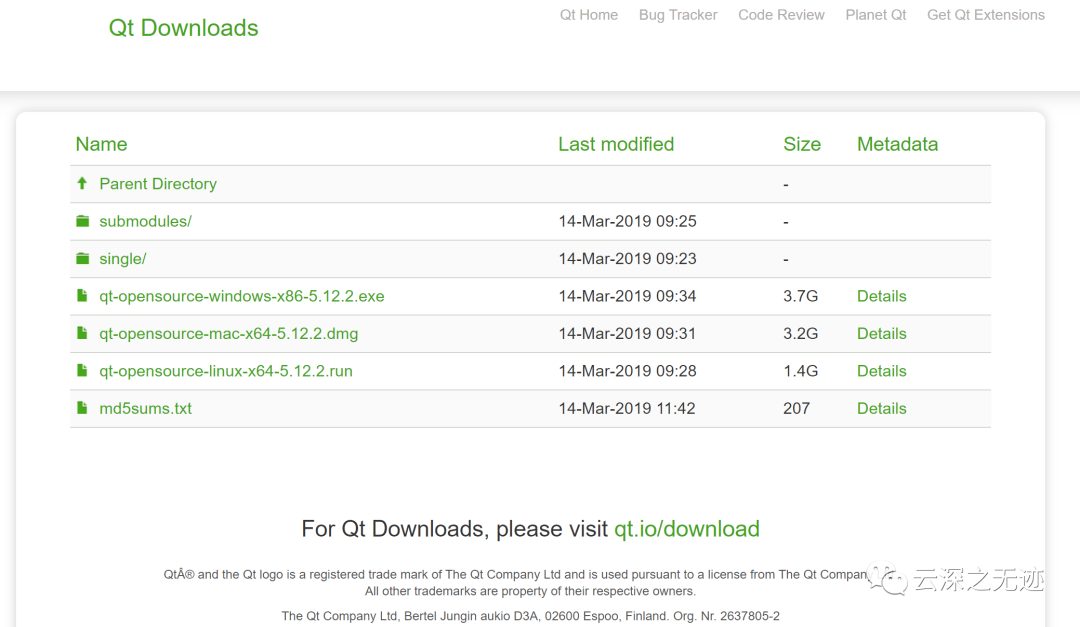
需要安裝QT5
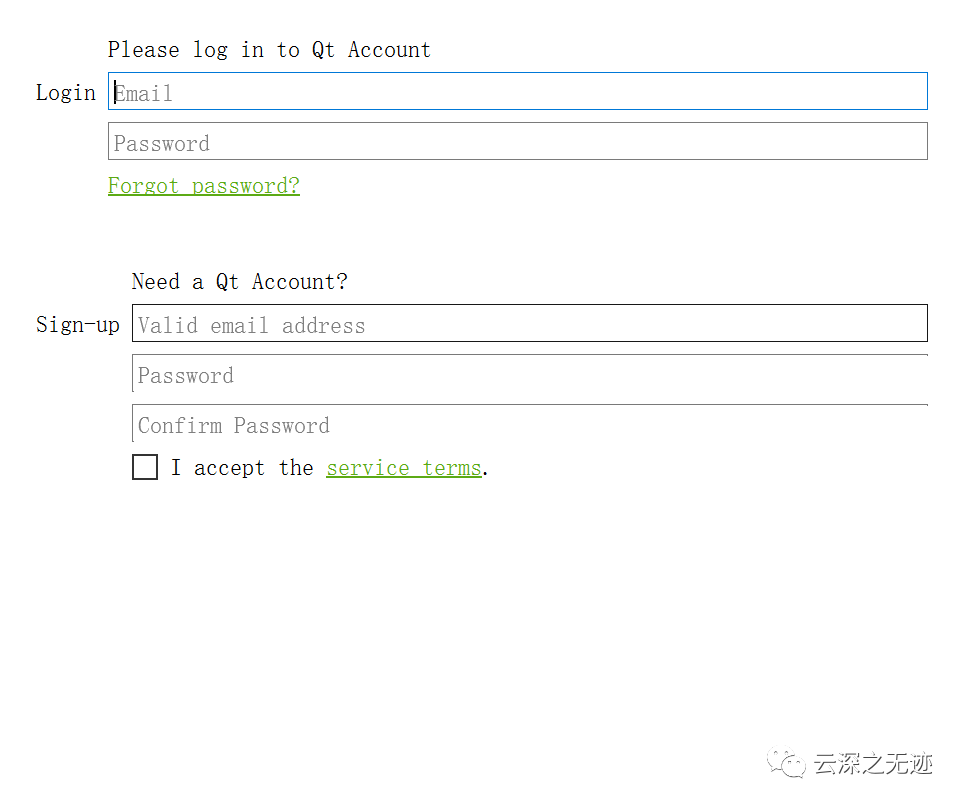
第一次使用要注冊(cè)
然后就是申請(qǐng)
在官網(wǎng)的最下面可以申請(qǐng)
安裝作業(yè)
位置
安裝的內(nèi)容
下一步
安裝好的樣子,下面是需要執(zhí)行的添加環(huán)境的命令
setx /m Qt5_DIR C:QtQt5.12.125.12.12msvc2017_64 setx /m QT_QPA_PLATFORM_PLUGIN_PATH C:QtQt5.12.125.12.12msvc2017_64pluginsplatforms

OK
在ROS的解壓文件夾下看下有沒有安裝腳本文件
call C:dev os2-package-windows-AMD64 os2-windowslocal_setup.bat

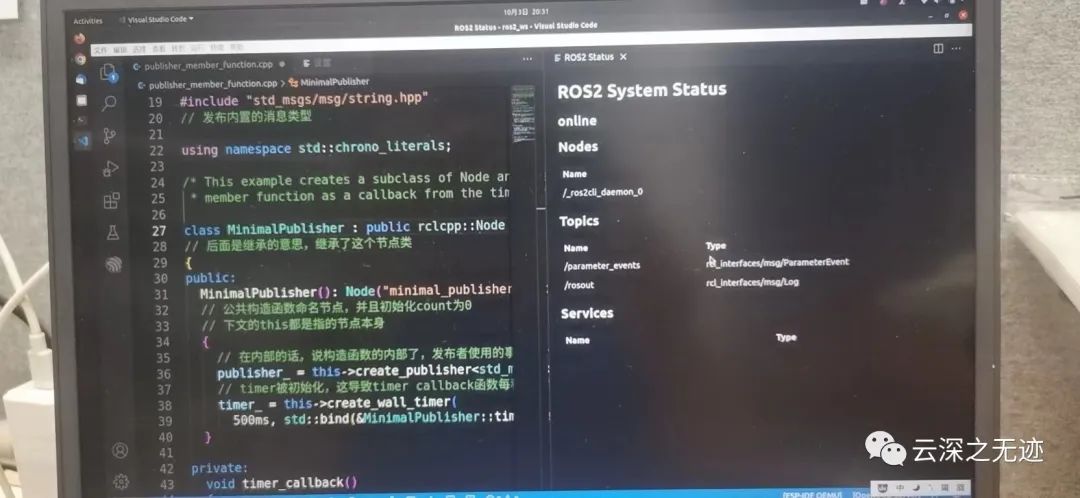
報(bào)錯(cuò)了,對(duì)吧,修一下
看了半天沒有看明白,Ubuntu上面的說什么DDS?為什么WIndow下的要錢???
后面我也沒心情搞了,這個(gè)是windows是真的不適合搞開發(fā)。
ubuntu下幾個(gè)命令就安裝好了,快樂的寫代碼。
審核編輯:劉清
-
DDS
+關(guān)注
關(guān)注
21文章
633瀏覽量
152631 -
SSL
+關(guān)注
關(guān)注
0文章
125瀏覽量
25737 -
OpenCV
+關(guān)注
關(guān)注
31文章
634瀏覽量
41338 -
LINUX內(nèi)核
+關(guān)注
關(guān)注
1文章
316瀏覽量
21644
原文標(biāo)題:Window10安裝ROS2
文章出處:【微信號(hào):TT1827652464,微信公眾號(hào):云深之無跡】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
系統(tǒng)鏡像Ubuntu_ROS2中ROS2是什么意思,帶有ROS2開發(fā)環(huán)境嗎?
如何在ROS2中運(yùn)行小烏龜呢
基于無線wifi網(wǎng)絡(luò)的X3派和PC虛擬機(jī)通過ROS2實(shí)現(xiàn)跨設(shè)備通信
【昉·星光 2 高性能RISC-V單板計(jì)算機(jī)體驗(yàn)】四:在 VisionFive2 上安裝 ROS2 humble
【昉·星光 2 高性能RISC-V單板計(jì)算機(jī)體驗(yàn)】五:在 VisionFive2 上體驗(yàn) ROS2 humble
微軟宣布Window10將正式引入機(jī)器人操作系統(tǒng)
window10卸載軟件_window10怎么改管理員名稱
Linux嵌入式開發(fā)筆記(六)在ROS2中運(yùn)行小烏龜實(shí)例

Window10怎么安裝ROS2
了解ROS2是什么
DDS在ROS2中的應(yīng)用

ROS2中自帶例程測(cè)試

在TogetherROS中如何安裝ROS2功能包






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論